S型无碳小车转向机构的优化设计*
2020-05-22贾婉君
郝 亚,张 席 ,贾婉君
(1.安徽工程大学;2.燕山大学)
0 引言
第六届全国大学生工程训练综合能力竞赛无碳小车常规赛项目,要求设计并制作一种具有方向控制的自行小车,以S轨迹绕过障碍物,赛道宽度为2 m, 沿直线方向水平铺设,赛道中线从距出发线1 m处开始按平均间距1 m摆放障碍桩,奇数桩位置不变,根据抽签结果, 第一偶数桩位置在±(200~300)mm范围内做调整(相对于出发线,正值远离,负值移近), 随后的偶数桩依次按照与前一个偶数桩调整的相反方向做相同距离的调整.
1 小车运动轨迹设计计算
1.1 小车运动轨迹设计
小车要求为三轮结构,前轮实现转向.设计后轮轴中点的轨迹为正弦曲线,如图1所示.为方便研究,取第一个障碍物作为原点,建立直角坐标系,为保证在最小桩距为700 mm时绕障,设计小车轨迹为:
(1)
则一个周期内小车走过的距离为:
(2)

图1 小车运动轨迹示意图
1.2 转向机构运动规律计算
设计转向由曲柄摇杆机构实现,摇杆带动前轮实现转向,取曲柄的一个旋转周期即x取0~2000 mm为研究对象,如图2所示,不同位置处小车前轮转角即摇杆摆角ψ′可求:
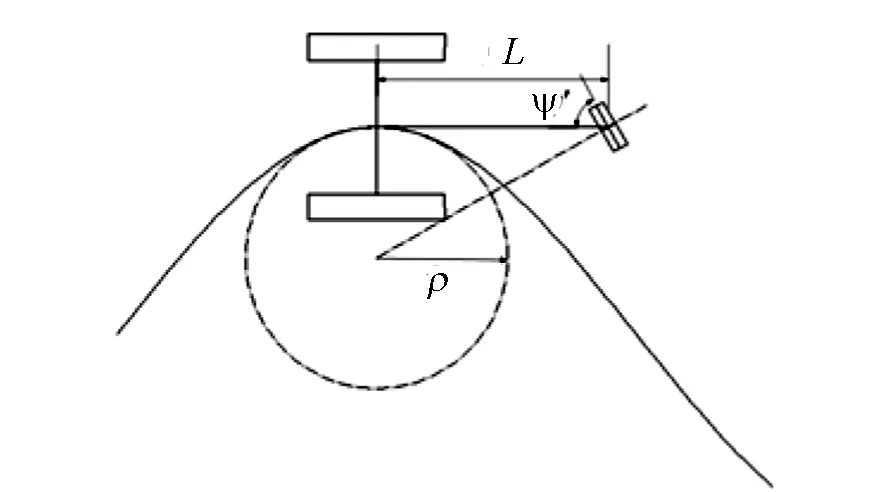
图2 小车转角示意图

(3)
其中L为小车前后轮轴距,ρ为曲线曲率半径.在x=0处前轮转角ψ′有最大值,令ψmax′=15°,求得L=68.
同时,不同位置处(0≤x≤2000)曲柄的转角φ′可求:
(4)
采用MATLAB编程,可得到曲柄转角φ′与前轮转角ψ′之间的关系,如图3所示,通曲线拟合功能,得出两者之间满足关系式(5):
ψ′=0.17sin(φ′+1.58)+
式中φ′与φ′均以曲柄摇杆的初始位置作为零点计算的.

图3 运动规律拟合曲线
如图4所示, 将φ′=φ-φ0、ψ′=ψ0+0.27-ψ,代入式(5),可得到以机架为基线逆时针度量的曲柄转角φ和摇杆输出角ψ之间的关系:
ψ=ψ0+0.27-0.17sin[(φ-φ0)+1.58]-0.07sin[2.98(φ-φ0)+1.72]
(6)

图4 曲柄摇杆运动示意图
式中φ0和ψ0分别为机构处于右极位时,曲柄和摇杆与机架的夹角:

2 转向机构的优化设计
根据式(6)描述的摇杆运动规律采用MATLAB进行优化设计.
(1)设曲柄长度l1=10,则独立的杆长变量有3个:l2、l3、l4,优化设计变量为x=[x1,x2,x3]T=[l2,l3,l4]T.
(2)目标函数的建立.取机构的已知运动规律和实际运动规律的偏差最小为指标建立目标函数,即:
(7)
其中m为输出角等分数,ψi为期望输出角,由式(6)求出,ψsi为实际输出角根据图5按公式(8)求出:
(8)


(a) 0≤φi≤π

(b)π≤φi≤2π图5 曲柄连杆机构计算图
(3)约束条件
①四杆机构有曲柄存在的杆长条件;
②根据加工限制:杆长不超过50 mm;
③机构无急回运动特性;
④机构最小传动角应大于45°.
综上,约束条件为式(9)所示.

利用MATLAB编程并采用fmincon函数进行求解,得出优化结果为:[x1,x2,x3]=[10,14.7,38.5,40]即各杆长为:l1=10,l2=14.7,l3=38.5,l4=40.
利用UG仿真软件对上述四连杆机构进行运动仿真,得到优化后摇杆的摆角曲线如图6所示.
从图6中可以看出,因此曲柄摇杆机构虽然可以实现前轮摆角从右极位到左极位的周期变化,但不能实现运动轨迹为标准正弦曲线.并且ψ=0时,曲柄的转角φ1<90°、φ2>270°.这样造成小车运动轨迹不对称.

图6 优化后运动曲线
3 转向机构的进一步优化

表1 曲柄与摇杆转角对应值
取摇杆的理论摆角和实际运动摆角偏差最小为指标建立目标函数,即:
(10)
约束条件中去掉机构无急回运动的限制,即式(9)中g10(x)、g11(x),得到杆长及摇杆最大摆角分别为:
l1=10,l2=14.7,l3=38.5,l4=40,
θ=0.8534=48.8°


图7 重新优化后的运动曲线

图8 两次优化后的运动曲线对比
4 结论
该文根据S型无碳小车的运动要求,设计了正弦曲线的运动轨迹,借助MATLAB得到了摇杆摆角与曲柄转角之间的数学关系.通过优化设计得到以下结论:
(1)曲柄摇杆机构虽然可以实现前轮摆角从右极位到左极位的周期变化,但不能实现运动轨迹为标准正弦曲线.因此不是最佳的转向机构.
(2)受机构限制,曲柄连杆机构不能使运动轨迹完全对称,但是可以通过优化寻求最优解.
