长江干线控制河段聚合化监管模式研究
2020-05-18徐晓明闻光华王天奇陈忠明付岩
徐晓明 闻光华 王天奇 陈忠明 付岩

摘 要:本文对目前长江干线控制河段监管方式的分析,在控制河段监管业务效率、成本、协同能力等方面总结目前业务上存在的一些亟待解决的问题,通过对问题的分析和探讨,结合目前先进的船舶航行安全管理理念以及多元化的信息技术处理手段,提出一种能够使控制河段监管业务高效低成本运行、适应业务变化、打破信息壁垒、可持续发展的聚合监管模式,并对该模式的设计理念、技术支撑、系统实现等方面进行了探讨和研究。
关键词:控制河段;通行指挥;AIS;雷达;无人值守;多信源融合
中图分类号:U697.2 文献标识码:A 文章编号:1006—7973(2020)02-0031-03
1 引言
控制河段是指具有弯曲、狭窄、滩险等特征、通视条件差、会船避让困难、导致船舶同一时间段内只能单向通行的航道河段。控制河段的监管可以保障控制河段区域内船舶通行安全,提高控制河段上下行船舶通行效率,避免船舶积压导致通行风险。控制河段的监管业务具有实时性、准确性、可视化的要求,随着航运经济的发展,对控制河段的监管业务在业务变化适应性、监管成本、监管效率、预控性、协同性、数据联通共享及对外服务等方面提出了更高的要求,以往的控制河段监管模式的问题已经逐渐显露,出现监管能力弱化、效率降低、成本增加等现象。本文试图对现有监管模式在技术手段和管理手段的问题上进行分析,研究和探讨一种能够使控制河段监管业务低成本高效运行、主动适应业务变化、数据信息互联互通的新型控制河段聚合监管模式。
2 控制河段问题分析
目前控制河段船舶航行安全监管采用信号台竖井式单点监管模式,由各信号台对其自身管辖范围内通行船舶施行依据信号揭示,指挥船舶通过控制河段。这种竖井式单点监管模式存在以下问题:
(1)数据采集手段匮乏,监管存在盲区。近年来,控制河段的监管引入了AIS、信号揭示装置的信息化技术手段作为辅助技术支撑,控制河段的指挥依靠AIS获取监管区域的船舶航行态势的数据,对AIS船舶目标数据进行采集与解析,进行辅助决策。控制河段当前在船舶数据采集方面仅使用Class B型AIS设备,但受自然条件限制及少数船舶不开启AIS等特殊情况,造成监管上存在盲区,影响信号台值班人员对辖区船舶动态的掌握与判断。
(2)船舶识别跟踪能力不足。船舶识别跟踪是控制河段监管的重要环节,由于数据采集手段匮乏,导致在监管过程中实时获取船舶位置、航速、航向等船舶动态数据的能力不足。
(3)信息无法有效共享,缺乏预控机制。控制河段监管使用的信息系统单独部署在信号台,各信号台均独立工作,缺乏信息共享方式,在业务上无法形成预控机制。当控制河段区域内发生施工、事故、船舶积压等情况时,各信号台间无法有效地进行协同指挥,加大了值班人员的工作负荷。
(4)监管成本高,值班人员工作负荷大。信号台开班期间因上下行船舶流量较大,信号台值班人员采用倒班制,对控制河段内的船舶进行指挥放行、信号揭示、船岸沟通、台账记录等工作,值班人员工作负荷较大,监管成本较高。
综上,当前控制河段采用的监管模式在数据采集、船舶识别跟踪、信息共享和监管成本等方面无法满足在船舶通行指挥监管对实时、预控、业务协同、事件追溯、信息共享等方面的要求。
因此,本文研究采用聚合化的监管模式转变当前控制河段竖井式单点监管模式,在各信号台通过部署雷达、AIS、VHF、CCTV等多种传感器设备,为信号台提供多元化数据采集方式,通过对多信源设备的数据采集与融合处理,形成实时准确的船舶航行动态数据资源,为指挥船舶通行提供数据支撑;通过构建数据互联通道,实现一数一源的中心化数据存储,以数据为媒介将各信号台有机互联,逐步形成信号台无人化值守、指挥中心远程调度指挥的聚合化监管模式。利用面向服务的思想构建高效的业务和数据服务,形成控制河段船舶通行安全监管全生命周期业务流程;通过构建具有预控、全区域覆盖、实时可视、多点联动、事件追溯等能力为一体的长江干线控制河段船舶通航控制系统,提高船舶通行效率,確保船舶通行安全,降低人员监管负荷,提升社会经济效益。
3 聚合化监管模式思路
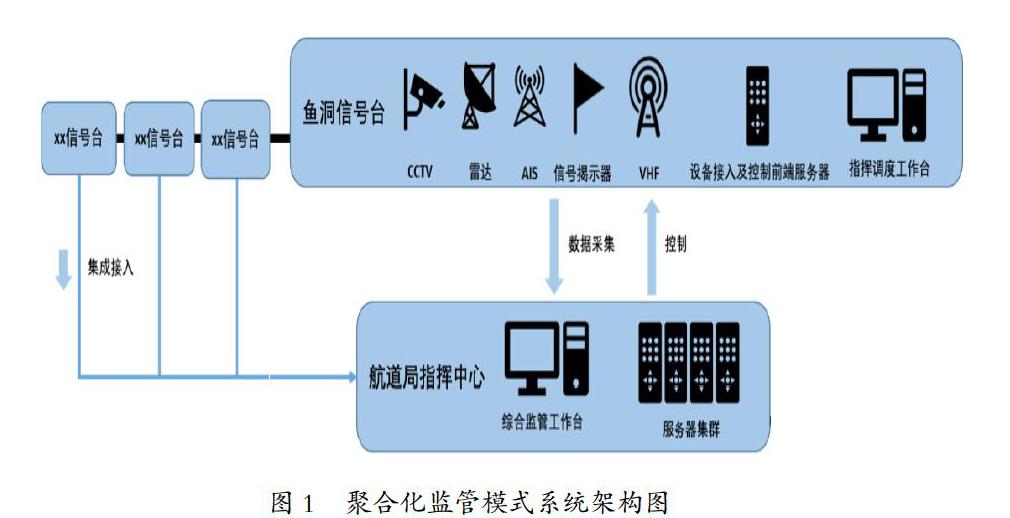
本文研究依托长江重庆航道局《长江干线控制河段船舶通航控制系统》项目的建设经验,该项目以聚合化的监管模式思路构建信息化系统。在控制河段信号台部署多信源传感器设备,采集多信源数据通过专线网络连通至局航道指挥中心进行数据融合处理;在局航道指挥中心部署通航控制系统。现阶段采用信号台指挥放行和局航道指挥中心监管的管理模式,初步形成“信号台-局航道指挥中心”二级工作体系,后续逐步实现信号台无人化值守,将原有信号台指挥放行模式转变为局航道指挥中心远程指挥放行模式,构建局航道指挥中心远程监管整个重庆辖区控制河段船舶通行状态的管理模式。
聚合化控制河段船舶航行安全监管模式构建思路从逻辑层面划分为两项主要内容:系统整体架构及处理流程、系统整体安全监管处理措施。
3.1系统整体架构及处理流程
多信源传感器设备包括雷达、AIS、CCTV、VHF和信号揭示装置。信号台负责控制河段区域的多传感器的数据采集和信号揭示装置的控制,需部署雷达、AIS、CCTV、VHF和信号揭示装置多种信源传感器设备,接入控制服务器,对多信源传感器设备数据进行采集与解析,将解析后的数据通过专线网络传输到局航道指挥中心的通航控制系统进行数据融合处理。现阶段在信号台部署通航控制系统工作台供一线值班人员调度指挥,后续逐步实现信号台无人值守,局航道指挥中心远程调度指挥。局航道指挥中心是整个系统的数据处理中心和服务应用中心,需部署系统服务器集群和数据库系统;部署综合监管工作台,监控整个重庆辖区控制河段的船舶通行状况。后续局航道指挥中心将接入全部信号台,形成“信号台-指挥中心”二级工作体系,最终逐步实现聚合化的监管。
3.2系统整体安全监管处理措施
系统采用三级监控预警模式,通过采用雷达、AIS、CCTV、VHF等传感器设备实现对船舶航行监管区域的一体化综合安全监管。在控制河段设定三级安全监管区域,根据风险级别进行分控管理。以銅锣峡为例,在三个信号台分别部署多信源传感器,联合监控整个铜锣峡的多个控制河段区域,整体监管模式示意图如图2。
按照风险级别由低至高划分,分别是一级监控区域(观察区),二级监控区域(警戒区),三级监控区域(危险区)。通过雷达、AIS数据解析融合处理实现对船舶目标的识别及跟踪,结合区域风险预警算法实现对船舶动态的实时监控及预警。基础预警类别分为接近预警和驶入预警,结合三个监管区域级别,通过多样化的方式进行主动式和被动式的监管和预警,对重点监管船舶使用CCTV设备实时联动跟踪监控。使用 VHF设备自动或手动发送语音,使用信号解释装置进行信号揭示,告知船方当前控制河段是否可以通行。
4 聚合化监管模式的技术支撑
构建聚合化监管模式依托的关键性技术包括:多信源数据融合处理技术、联动识别跟踪技术、VHF语音自动播报技术及控制河段饱和度平衡度双控算法。采用以上关键性技术,提高控制河段船舶指挥效率、通行效率和安全性。
4.1 多信源数据融合处理技术
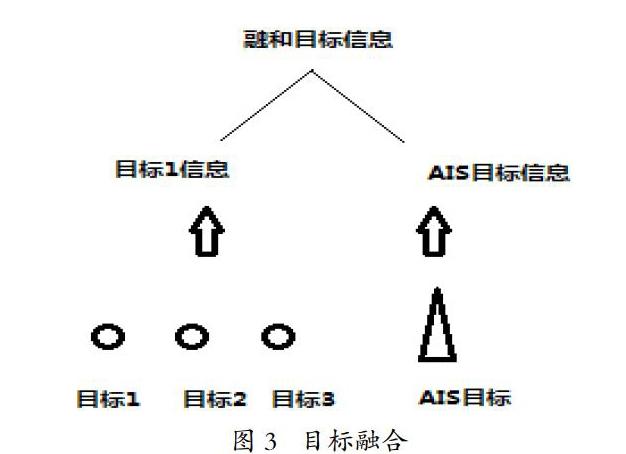
系统接入多个雷达对整个覆盖区域进行联合监控,会出现多个雷达重叠区域扫描到同一轨迹目标的情况。要保证系统识别为同一轨迹目标,需对各个雷达扫描到的同一个轨迹目标信息进行融和,融合后的雷达目标与AIS设备识别的同一目标也需进行融合处理,最终实现系统中的同一目标的唯一显示。
雷达目标融合:对雷达重叠范围内的轨迹目标进行融合处理。雷达重叠范围内的目标,通过判断雷达目标的位置、航速、航向、雷达目标特征等信息,将位于同一位置的多个雷达目标融合为一个雷达目标。
AIS目标融合:对融合后的雷达目标与AIS目标进行融合处理。AIS目标更新频率较雷达目标更新频率低,需对AIS目标进行轨迹推算,再与雷达融合目标进行融合处理。
4.2 联动识别跟踪技术
系统接入CCTV设备,实现CCTV云台与船舶目标的联动识别跟踪。雷达和AIS设备获取船舶目标的矢量信息(包括船舶ID与船舶经纬度坐标),通过与CCTV云台间的通信接口,将船舶目标的经纬度坐标发送给CCTV云台,并控制CCTV云台的旋转角度,在电子航道图上实现船舶目标的锁定和联动跟踪。
4.3 VHF语音自动播报技术
系统接入支持VOIP协议的VHF岸台设备,使船岸的语音沟通实现自动化。采用TTS技术将预警或船舶调度等信息文字转换成语音,通过支持VOIP协议的VHF岸台设备将语音自动向船方广播。
4.4 控制河段饱和度平衡度双控算法
为提高控制河段通行效率和安全性,系统引入饱和度平衡度双控算法。利用对饱和度、平衡度进行组合控制计算,确定最优的放行方案。
(1)饱和度算法:分为上游饱和度和下游饱和度,根据上下指挥断面船舶数量阈值计算比例值,得出航区拥堵状态指标。场景如下:
发生场景一和场景四的情况时,基于上下行的权重分配,引入平衡度算法。
(2)平衡度算法:根据上下行权重计算,在上下指挥断面处于场景一和场景四的情况时,平衡度算法将根据上下游放行权重阈值的设定进行计算,以确定放行方案。
5 结语
综上所述,通过聚合化控制河段船舶航行安全监管模式的研究,构建局航道指挥中心远程监管整个重庆辖区控制河段船舶通行状态的管理模式,实现信号台无人化值守,形成“信号台-航道局指挥中心”的二级工作体系。通过转变现有控制河段业务的监管模式,提高船舶通行效率,降低人员工作负荷,有效避免船舶积压,保障船舶通行安全。
参考文献:
[1]国务院. 国务院关于依托黄金水道推动长江经济带发展的指导意见[J]. 中国水运(上半月),2014,(10)
[2]毕方全.信号台信号自动揭示与船舶通行智能辅助指挥系统技术研究[J].科技传播,2011,(13):225-226
[3]王俊,熊明.长江水文测报自动化技术研究[M].北京:中国水利水电出版社,2009
[4]钟丽,靳智,梁山.控制河段智能视觉跟踪控制系统设计[J].交通科技,2013,(4):137-139