基于单目视觉的测距算法∗
2020-05-15张云飞王桂丽周旭廷许晨晨
张云飞 王桂丽 周旭廷 许晨晨
(安徽师范大学物理与电子信息学院 芜湖 241002)
1 引言
伴随汽车数量的日益提高,车辆驾驶环境也逐渐恶化,高速公路事故发生率大大高出普通公路的事故发生率,为了减少车辆事故的发生就要依靠车辆自身的安全避障技术。目前使用较多的测距传感器有激光传感器、雷达传感器及视觉传感器等。王少勇等利用激光传感器作为高速公路上的测距装置[1],谢宜生等在深入分析微波雷达传感器特性及其工作原理的基础上,设计了一种能在高速公路上探测前后车辆相对距离与相对速度的微波雷达传感器[2],岳昕等提出了利用小波分析技术对雷达的中频信号进行处理的方法探测自车与前车的距离[3]。视觉传感器获得的图像直观并能提供更加丰富的信息,测距精度相对较高,系统所需的能量较少,稳定性更高,且能在复杂环境下及时提供信息[4~5]。目前常用的视觉测量技术包括单目视觉测量、双目视觉测量等[6~7]。刘燕等采用单目CCD摄像机作为输入设备,用计算机对输入图像进行处理,从而得到本车道前车处的车道标线宽度,并进一步根据车距测量模型计算出两车之间的实际距离[8]。韩延详等首先对采用的摄像头进行标定,其次在图像处理的基础上,建立在光轴方向上目标的测距模型,再根据图像中心点与特征点的关系,实现目标的完全定位[9]。弋英民等通过图像处理与分析,识别出特征点并进行定位,将轮式机器人的视觉投影与空间物体的几何关系转换为计算机器人相对特征点的距离和角度[10]。张凤静等利用的是异面直线公垂线中点法计算出目标车辆到摄像头距离的双目测距算法[11]。以刘嵩鹤等以双目立体视觉技术、图像处理和模式识别等理论为基础,将车牌作为前方车辆的探测依据,提出了一种前方车辆的探测和安全车距测量方案[12]。因为激光测距受天气变化限制,且获取的前方道路信息不全面,在高速上会有所限制;而雷达的价格高,体积大,且易受干扰,限制了在普通运载器上的应用;双目测距因需要进行图像匹配,计算量大,难以达到实时性的要求。单目测距因装置简单,算法复杂度低,实时性好等特点,可以广泛运用于汽车测距系统。
本文引入的基于单目视觉的测距算法[13],是在获取的道路图像中,选取图像中车道线上至少4个点,通过几何推导,获得平面上对应点坐标,计算两条车道线斜率,以求极值的方法计算摄像机当前的俯角值。通过背景差分法提取出前方运动目标,经图像处理,获取车辆底部与路面相交的点,利用计算出的俯角值,从而实现障碍物测距。
2 理论分析
2.1 目标检测
利用摄像机采集车辆四周实时视频信息并取出帧图像。对帧图像做图像预处理;利用背景差分法提取出车辆,并经图像处理获取车辆与路面相交的点。
背景差分法原理:
相较于光流法和帧差法,背景差分法可以更好的提取出目标车辆,为视觉测距提供有效的帮助[14~15]。
2.2 摄像机成像模型
在人工和数字视觉系统中,总是存在着空间相互位置和朝向关系需要标定的多种坐标系。最基本的坐标系一般要涉及下述四种坐标系,即世界坐标系,摄像机坐标系,像平面坐标系和图像像素坐标系[16]。
2.3 目标测距原理
本文利用的是基于图像与坐标系之间的几何关系来推导障碍物的位置距离,详细推导过程如图3所示。
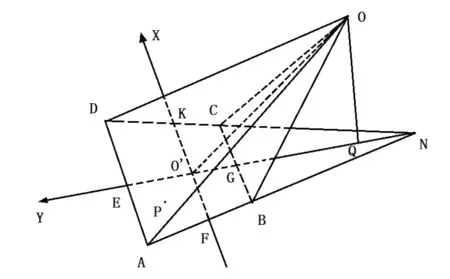
图3 摄像机拍摄模型投影
图3 为摄像机拍摄模型投影,ABCD表示拍摄到的路面区域,P(Xp,Yp)点为待测点,O点为摄像头中心点,OO'为摄像机光轴,O'为摄像机光轴与地面的交点,Q为摄像头中心点在路面的投影。
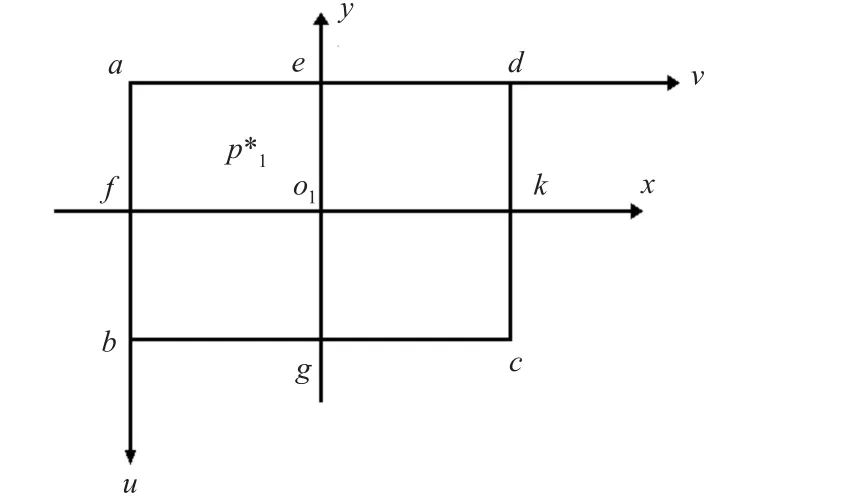
图4 图像平面坐标系
图4 表示像平面坐标系,uv表示以像素为单位的图像坐标系,为方便计算,将图像坐标系转换成世界二维坐标系,即xo1y。实际图片的大小为h×w,即ab高为h,bc宽为w。
摄像机安装高度为H,采用广角镜头,镜头横向可视角即图像所能看到的横向视野角度为2α,垂直可视角即图像所能看到的纵向视野角度为2β,根据几何原理,图中 ∠fOk=2α,∠eOg=2β,假定摄像头俯角∠QOO′=γ,物点与光轴夹角为∠POO′=θ。
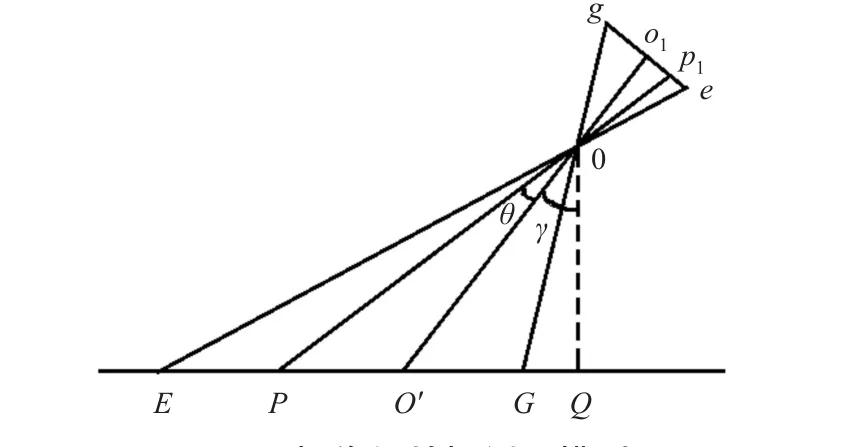
图5 摄像机拍摄侧面模型
根据图5,利用几何原理,推出图中θ角大小为

利用摄像机高度计算出线段:
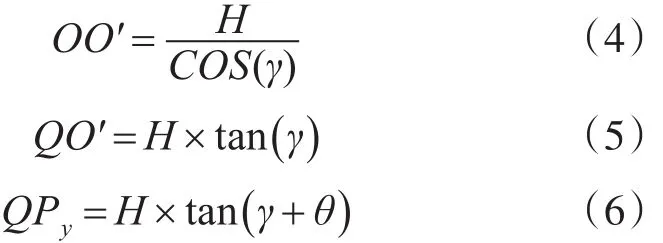
将式(5)和(6)带入下式中:

因为O′Py的长度是点P的Y轴坐标值,将式(3)、(5)和(6)代入式(7)可得出式(8):
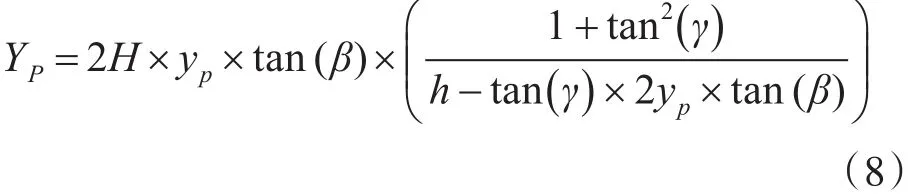
上式为P点在世界坐标系中的Y轴上的值,接下来再求解X轴上的值。
根据图5利用几何原理,求出线段:
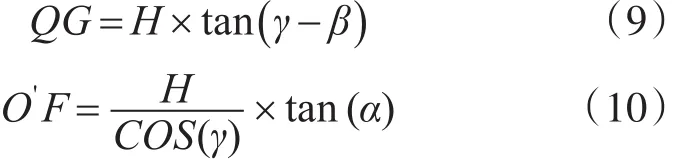
根据图5,求出线段:
利用相似三角形原理:

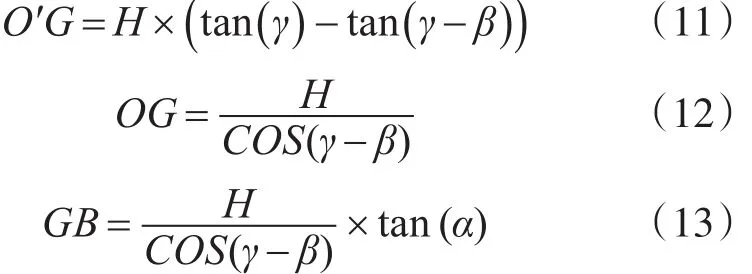
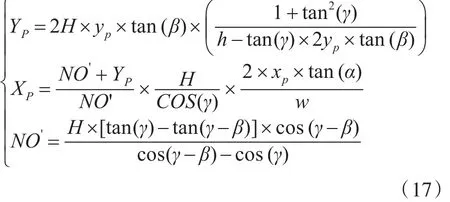
将式(10)、(11)和(13)带入式(14)可以解得NO'为

利用几何原理,可以计算P点的坐标值:

即路面上点P(Xp,Yp)在图像中的映射点为p(xp,yp),路面坐标系与图像坐标系的转换关系为
因为实际道路环境中,车道线是平行的,利用这一约束条件,可以作为距离测量的依据。

图6 车道线图像
如图6所示,将图像进行预处理,滤波,二值化,利用hough变换检测出车道线位置,可分割出左右车道线的像素范围,取左侧车道线上前后两点,计算左侧车道线斜率:

同理,计算右侧车道线的斜率:

在实际道路路况下,两条车道线是平行的,即两条车道线夹角为零。

对式(20)求导,当M'=0时,解得的γ值即为摄像机的俯仰角大小,再根据下式计算点P的实际距离。

式(21)求出的值即为摄像头前方P点的距离。
3 试验结果
试验过程中使用的是广角摄像头,图像像素为3024×4032,像元大小为1.6um,摄像机每秒拍摄24帧图像。通过测定,该广角摄像头的横向可视角为 2α=67.6°,垂直可视角为 2β=53.1°,摄像机安装高度通过测量为H=1.73m。
摄像头采集图像如图7所示,通过本文提出的单目视觉测距算法,可以测出图中障碍物的距离如表1所示。图中标记车辆即为障碍物位置,取图像两侧实车道线为约束条件。
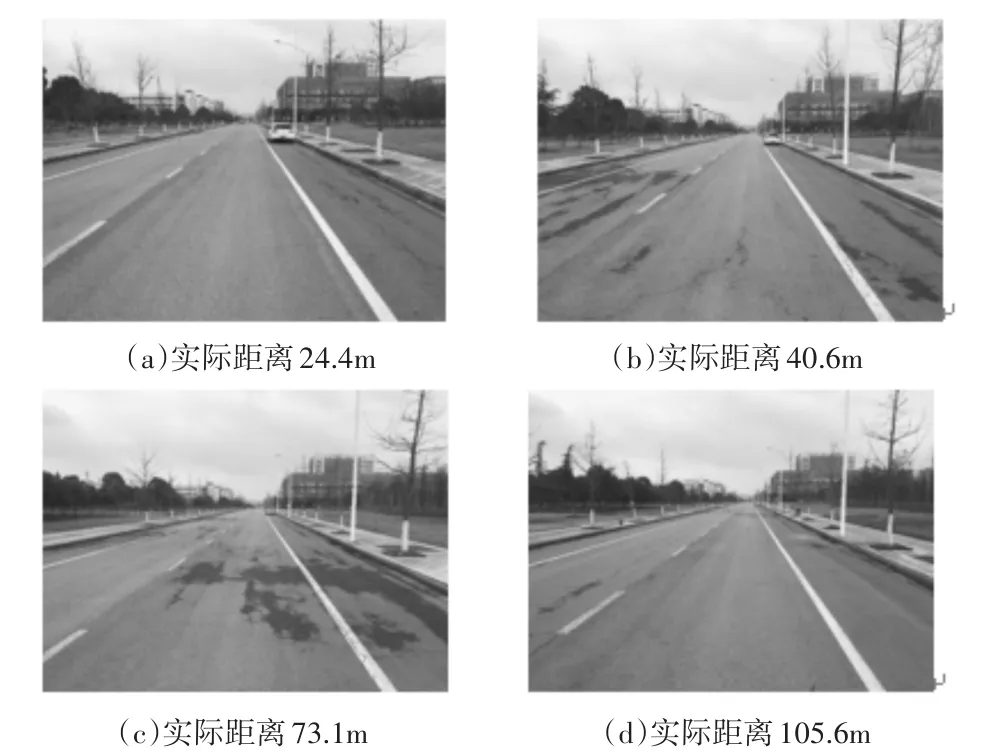
图7 摄像机采集障碍物不同距离的图像
实际测量结果如下
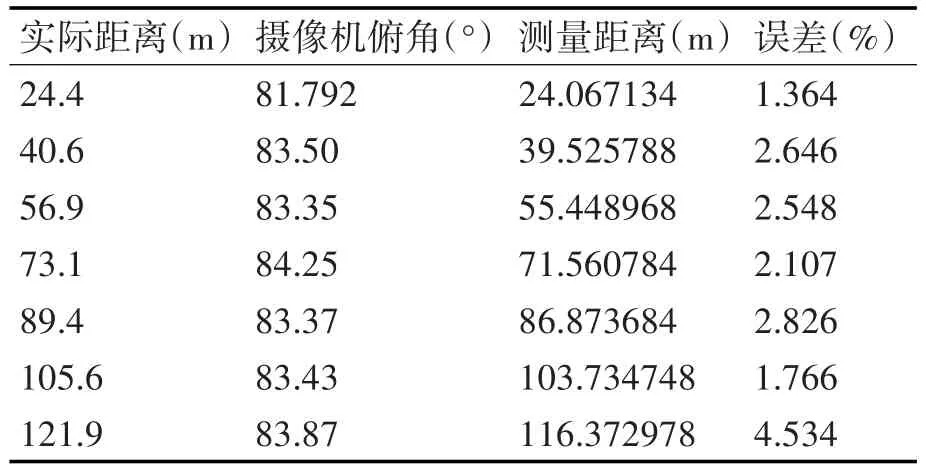
表1 测距结果
结果显示,测距在120m内误差较稳定为4.534%。利用背景差分法有效提取障碍车辆坐标并测距,从测试结果上看,明显提高了测量精度和测量距离。根据驾驶规则,机动车在高速公路上行驶,车速超过100km/h,应当与同车道前车保持100m以上的距离,车速低于100km/h,与同车道前车距离可以适当缩短,但最小距离不得少于50m。而本文引入的单目测距算法满足高速公路的测距要求,且算法简单,实时性好,适合广泛运用。
4 结语
本文先用背景差分法提取出前方运动目标,再用基于单目视觉的测距算法来测量前方障碍物的距离,该方法在高速公路车辆运动过程中,很好地应对摄像机的微弱晃动导致的测量误差,通过Mat⁃lab仿真实验验证了该方法可行,且算法简单,满足动态实车的实时性要求。
