主被动一体悬架构型的多目标粒子群最优控制
2020-05-12胡一明李以农李哲杨
胡一明李以农李 哲杨 超
(1.重庆大学汽车工程学院,重庆 400030;2.重庆大学机械传动国家重点实验室,重庆 400030)
1 引言
轮毂电机电动汽车将电机直接集成于车轮中,减少了机械传动机构,提高了传动效率,且驱动控制更加快速精确,已经成为了电动汽车研究的热点[1].由于轮毂电机的特殊布置形式,导致车辆簧下质量增大,此外,轮毂电机力矩波动直接作用于车轮,使得车辆的行驶平顺性和操纵稳定性急剧恶化[2–3],针对轮毂电机电动汽车的这种振动负效应问题,普利司通公司提出了动态减振轮毂电机驱动系统[4],如图1所示,此系统的减振机构将电机悬置于半轴之上,电机转矩通过挠性连接机构传递到车轮.
从悬架动力学构型上看,图2(a)所示的传统汽车悬架构型,其簧下质量没有集成轮毂电机,图2(b)所示的轮毂电机集中式悬架构型,其簧下质量集成有轮毂电机,而图2(c)所示的动态减振悬架构型,通过减振机构将轮毂电机悬置,间接减小了簧下质量,且电机波动力不直接作用于车轮,缓解了电机波动力引起的振动恶化.这种将电机作为吸振器的动态减振悬架构型为解决轮毂电机电动汽车振动负效应问题提供了一种行之有效的手段.

图1 动态减振轮毂电机驱动系统[4]Fig.1 Dynamic damping in wheel motor drive system[4]
基于这种将电机质量与簧下质量分离的思想,一些科研机构研究开发了类似的轮毂电机及悬架集成结构[5–7].但是这些方法仅仅是传统结构设计方法的延续,车辆动力学性能提升并不明显,不能从根本上解决轮毂电机电动汽车振动负效应问题.
将主动悬架应用于轮边驱动系统是解决轮毂电机电动汽车振动负效应的可行手段.近年来主动悬架的研究一直备受瞩目,热点集中在主动作动器以及主动悬架系统的控制策略.例如BOSE公司推出的电磁主动悬架[8],不同于传统主动悬架的执行元件(空气弹簧、液压作动器等),电磁主动悬架采用直线电机作为作动器,其控制响应频率范围宽,具有较高的控制速度和控制精度,此外还具有能量回收功能[9].针对主动悬架控制策略,国内外也开展了广泛的研究,控制策略涉及H∞控制[10]、模糊[11]、自适应[12]及鲁棒控制等[13].

图2 四分之一汽车悬架构型Fig.2 Quarter suspension configuration
此前的研究,将构型优化和主动悬架的控制相分离,不能很好的解决轮毂电机电动汽车的振动负效应问题,本文将动态减振悬架构型与电磁主动悬架的控制相结合.提出基于主被动减振于一体的轮毂电机电动汽车主动悬架系统设计方法,以解决其振动负效应问题,改善轮毂电机电动汽车的舒适性和安全性问题,为推动其产业化应用提供理论基础.
2 主被动一体悬架动力学模型
如图3所示为基于动态吸振的主被动一体化悬架构型.
为了精确的分析主被动一体化悬架构型设计对整车动力学性能的影响,特别是对车身姿态的影响,建立基于主被动一体化悬架的包含车身俯仰、侧倾11自由度整车动力学模型,如图4所示.其中:αx,αy分别为质心处的纵向加速度和横向加速度;dr,dp分别为质心到侧倾轴和俯仰轴的距离;L1,L2分别为质心到前轴、后轴的距离;L3,L4分别为前半轴距和后半轴距;z0,θ,ϕ分别为质心垂向位移、俯仰角以及侧倾角;ksi,csi分别为第i轮悬架的刚度和阻尼;fci为第i轮悬架的主动控制力;kmi,cmi分别为第i轮动态减振的刚度和阻尼;mui为第i轮的簧下质量;kti为第i轮轮胎的刚度;mmi为第i轮轮毂电机的质量;z为车身质心处的位移;zui为第i轮簧下质量的位移;zmi为第i轮轮毂电机质量的位置;zgi为第i轮处的路面位移.

图3 主被动一体化悬架构型Fig.3 Integrated suspension configuration
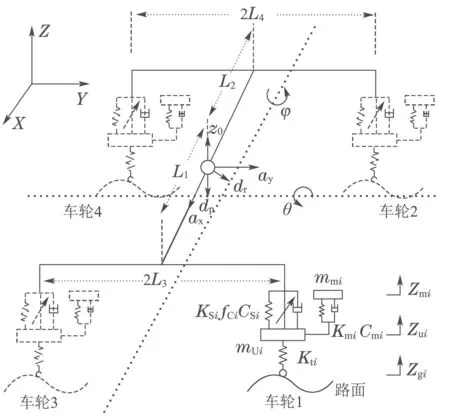
图4 主被动一体化悬架整车11自由度动力学模型Fig.4 11 degree of freedom dynamic model for integrated suspension configuration vehicle
整车模型状态方程表示为

式中A,B,G,C,D,H为系统的状态矩阵.
定义状态变量为

定义系统输出为

系统输入为

系统扰动为

式中:


3 整车主动控制器设计
整车主动控制器分为两个部分,底层为经典LQR最优控制器,上层为多目标粒子群最优匹配层,通过多目标粒子群算法将悬架与控制器最优匹配.
3.1 底层控制器设计
底层控制器为经典LQR状态反馈控制器,目标函数选为

权重矩阵为
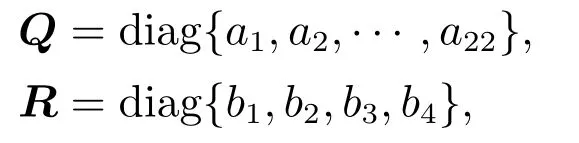
其中:Q为输出Y的权重矩阵,R为输入U的权重矩阵,a1,a2,···,a22为系统输出各子项的权重,b1,b2,b3,b4为系统输入各子项的权重.
通过求解黎卡提方程,可获得系统的控制输入

其中:K为反馈增益矩阵;X为状态变量.通常状态变量的直接测量比较困难,成本较高,可采用Kalman滤波方法,对状态参数X进行估计.
经典算法中权重系数一般根据经验确定,难以达到控制器性能的最优,且不考虑悬架参数的变化.本文利用多目标粒子群算法对悬架参数与控制器参数进行多目标参数优化,通过求解主被动一体化悬架系统的设计参数(悬架参数、控制器参数),有效解决振动负效应问题,使轮毂电机电动汽车的舒适性和安全性显著提升.
3.2 多目标粒子群联合优化设计
本文提出的主被动一体化悬架构型设计变量多,且设计变量与目标函数之间呈现强非线性关系,多目标智能算法能较好的处理这类问题.本文采用基于Pareto支配关系的多目标粒子群算法(multi-objective particle swarm optimization,MOPSO)对主被动一体化悬架构型参数进行联合优化[14–15].
本文的多目标参数优化问题描述如下:

其中:f1(x),f2(x),···fn(x)分别为第1到n个优化设计目标;T为约束条件;Rm为设计变量域;G为变量约束;n为设计目标维数;m为设计变量维数;u为约束个数;Ψ为惩罚函数.
3.2.1 设计目标
主被动一体化悬架优化设计的目标是为了改善车辆的行驶平顺性、操纵稳定性以及提升悬架的作动效率,选取设计目标函数如下:
1)选取车辆质心的垂向振动加速度¨Z、质心俯仰角加速度¨θ以及悬架动行程Zu−LZs来表征行驶平顺性.
2)选取侧倾角ϕ、轮胎跳动Zg−Zu来表征操纵稳定性.
3)选取主动控制力的最大值max(U)以及平均有效控制力rms(U)来表征主动悬架的作动效率.
对其进行归一化处理,经过归一化的3个目标函数为
目标函数1

目标函数2

目标函数3

其中:下标p为被动悬架性能指标,下标b为初始LQR控制器性能指标.
3.2.2 设计变量及约束
主被动一体化悬架构型参数包括控制器参数、悬架参数以及动态减振系统参数.选取悬架系统的刚度ksi及阻尼csi、动态减振系统的刚度kmi及阻尼cmi、控制器权重矩阵Q,R作为设计变量.
设计变量的基准值为原始被动悬架值,普通轿车满载偏频为1~1.45 Hz,令悬架刚度取值范围为0.75~1.5倍基准值,阻尼器的阻尼大小与尺寸关系较大,变化不能太大,选取0.25~1.5倍基准值,而动态减振系统刚度以及控制器参数选取范围较大,可允许程序在较大范围内随机搜索.
设计变量及约束条件如下:设计变量为

约束条件为

其中:下标b为悬架初始参数,根据动力学模型的对称性,存在:

3.2.3 惩罚函数设计
由LQR最优控制器的特性可知,当系统的汉密尔顿矩阵在复坐标系的虚轴上没有特征根的时候,控制器无法求出增益矩阵K,此时优化设计过程会出现错误而中断.为了避免求解过程中断并使群体远离错误解,设计惩罚函数Ψ,Ψ的维度与目标空间维度一致,即

其中σ为较大的正数.
当增益矩阵K无法求出,使得适应度函数Ffitness(x)无法获得时,赋予适应度函数Ffitness(x)的解为较大的值,优化算法自动排除此劣解,并使得群体优化方向远离此解,避免迭代过程的中断.
3.2.4 优化设计流程
综上所述本文的设计目标维数n=3,设计变量维数m=15.
多目标粒子群算法优化设计流程如图5所示.

图5 多目标粒子群迭代流程图Fig.5 Flow chart of multi-objective particle swarm algorithm
3.2.5 多目标粒子群算法参数的选取
粒子群算法参数的选择,极大的影响优化设计的结果,其中种群规模与迭代步数决定了迭代时间的长短和计算结果的准确性,本文根据计算条件选取种群规模为600,外部集上限lmax=500,当外部集中的解超过上限时,基于自适应网格法,每次从密度最大的超立方体中删去一个解[14],直至外部集数量等于上限lmax,迭代步数为1000步.
惯性系数Wf用来平衡全局搜索与局部搜索,通常较大的Wf有较强的全局搜索能力,而较小的Wf则局部搜索能力较强,本文采用惯性系数Wf跟随迭代步线性变化的策略,初始Wf=0.7,结束时Wf=0.4,使算法在迭代初期拥有较强的全局搜索能力,在迭代末期增加其局部搜索能力.
权重因子R1,R2代表粒子群体在搜索方向的选择上考虑个体经验与全局经验的权重,通常选取标准权重因子R1=R1=2.即个体经验与全局经验权重一致.
约束因子a用来改善群体收敛过快,容易陷入局部最优的问题,通常选择a=1,本文为了增加迭代末期的局部搜索能力,初期选择a=1,一定步数之后选取a=0.2.
惩罚系数σ取较大的正数,原则上惩罚系数σ需远大于目标函数值,本文取σ=1e10.
3.2.6 车辆动力学仿真参数的选取
汽车系统动力学模型参数如表1所示.
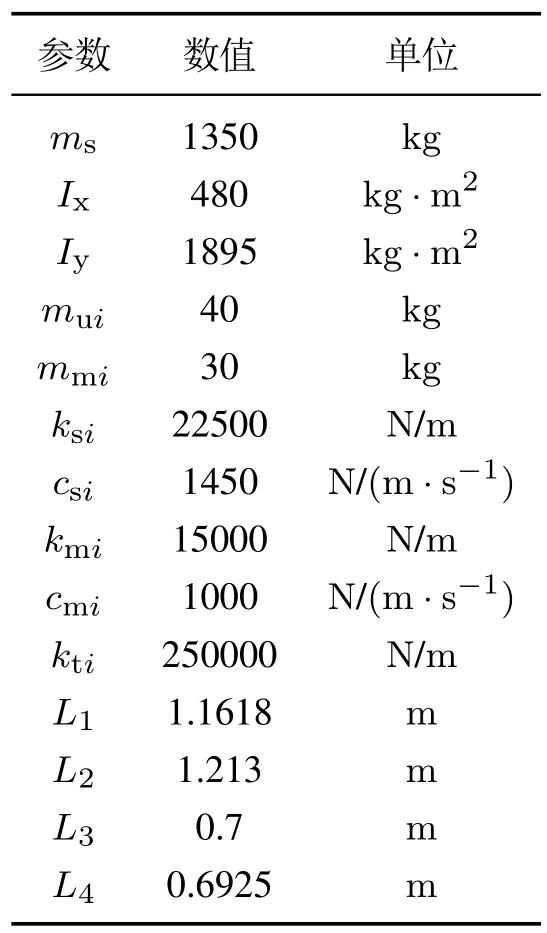
表1 汽车动力学模型参数Table 1 Parameters of vehicle dynamics model
迭代过程是悬架构型参数对路面工况的一个自适应过程,仿真模型采用不同的路面模型会得到不同的结果,本文采用常见的C级路面,纵向加速度、侧向加速度分别为ax=−5 m/s2,ay=4 m/s2;初始车速为15 m/s.
4 结果分析及讨论
图6为3个目标函数平均值在迭代过程中的动态变化图,可知在600步之后目标函数值基本稳定,此时迭代已经趋于收敛.

图6 外部集目标函数适应度平均值Fig.6 Mean of objective function in external archive
图7为目标Pareto前沿可视图,图中x,y,z三个坐标分别为目标函数1、目标函数2以及目标函数3.Pareto最优解集中的各个解互相均满足非支配关系.

图7 Pareto前沿可视图Fig.7 Pareto front
4.1 Pareto典型解选取
Pareto解为一系列非支配解,需要从中选取典型解作为主被动一体化悬架的构型参数.为了排除最优解选取中的人为因素,本文采用模糊集理论对Pareto解进行优选[16].

定义支配函数φk,第k个解的支配值为

式中:l为外部集中解的数目,根据模型的仿真结果,l为217;n为悬架优化设计目标个数,如上文所述n为3.
根据式(6)–(7)计算外部集中所有解的支配值,选取支配值最大的解为Pareto最优解集的典型解,如图8所示.

图8 外部集中各解的支配值Fig.8 Dominating value of solution set in external archive
最大支配值的解为外部集中的第20个解.将典型解作为MOPSO–LQR 控制构型参数,初始解为原LQR控制构型参数.
表2为初始解、典型解变量参数值与目标函数值列表.

表2 优化设计结果参数对比Table 2 Comparison of optimization results
4.2 时域响应分析
表3 为各悬架构型系统响应均方根(root mean square,RMS)值.图9为系统的时域响应曲线.
可以看出,轮毂电机集中式悬架构型相对于传统汽车悬架构型,各项动力学性能均有一定程度的恶化,质心垂向振动加速度及轮胎跳动恶化较明显.而动态吸振悬架构型仅有质心垂向振动加速度有一定程度的降低,相对于传统汽车悬架构型,其他的性能指标提升并不明显,且轮胎跳动有略微的增加,并没有根本的消除振动负效应问题.

表3 路面激励下车辆响应的RMS值对比Table 3 RMS value comparison of vehicle response under road excitation
比较动态吸振悬架构型与主被动一体悬架构型,可以看出,基于LQR控制的主被动一体化悬架构型,在操稳性和平顺性上相对于其他悬架构型都表现出了一定的优势,车身俯仰角与侧倾角分别降低7%,11%,悬架动挠度四轮平均降低13%,但轮胎跳动比被动吸振构型有小幅增加,这使得车辆的安全性有所降低,说明根据经验选取的构型参数无法使系统达到全局最优状态.


图9 路面激励下车辆时域响应曲线Fig.9 Time domain response curve of vehicle under road excitation
而基于MOPSO–LQR控制器的主被动一体悬架构型,系统动力学性能进一步提升,质心垂向振动加速度、车身俯仰角以及车身侧倾角分别降低57.8%,36%,51.7%,明显改善了电动汽车的舒适性以及安全性,在车身姿态控制上有明显的优势.四轮悬架动挠度平均降低54%,四轮轮胎跳动平均降低6.5%,基本消除了轮毂电机驱动系统的振动负效应问题.
4.3 频域响应分析
时域分析仅针对特定的路面工况,无法反应其他工况下的响应,需要在频域上对系统进行分析,将关心的频响输出与输入分别列出,如表4所示.

表4 频响分析输入输出Table 4 Input and output of frequency response analysis
图10为车身对路面输入的频响函数,可以看出,LQR控制主被动一体化悬架构型相对于动态吸振式悬架构型而言,并没有达到全局最优,主要偏向于平顺性的优化,而MOPSO–LQR控制的主被动一体化悬架构型在不影响平顺性的情况下,提高了轮胎跳动在中高频的性能,在低频性能上有小幅的下降,显著改善了车辆平顺性与操稳性.
图11–12为典型输出对纵向加速度以及侧向加速度的频响函数图.

图10 典型输出对路面速度的频响曲线Fig.10 Frequency response curve of vehicle under road excitation



图12 典型输出对纵向加速度的频响曲线Fig.12 Frequency response curve of vehicle under longitudinal acceleration excitation
由于加减速以及转向等在实际应用中主要是低频输入,此处主要分析低频段的结果.可以看出,MOPSO–LQR控制在低频段上侧倾、俯仰以及悬架动挠度上和时域结果比较一致,体现了较好的振动负效应抑制效果,轮胎跳动只在一阶波峰前有一定的性能提升,考虑到实际应用中侧向及纵向输入较少,可以认为操稳性和平顺性有明显改善.
4.4 作动力及作动效率分析
表5为主动作动效率指标参数的对比汇总.图13为主动作动力时域及频域响应曲线.

表5 主动作动力对比Table 5 Comparison of active control force


图13 主动作动力时域及频域响应曲线Fig.13 Time domain response and frequency response curve of active control force
可以看出,MOPSO–LQR控制下四轮最大作动力平均降低28.6%,有效作动力平均降低22.2%,四轮作动效率平均提升8.9%,这表明作动器能耗降低,显著提高了车辆行驶的经济性.
MOPSO–LQR控制输出低频部分幅值有所升高但并不明显,高频部分的幅值有较大程度的减小,表明作动器作动速度减小,降低了作动器的加工设计要求,提高了作动器的耐用性及安全性.
4.5 振动能量分析
表6为系统振动能量及固有频率分布,由于模型的对称性,选取第1,2,3,4,8阶固有频率.
可以看出动态吸振构型中,质心垂向运动与俯仰运动的振动耦合度较高,垂向运动与俯仰运动的振动能量占比分布为37%与32%,主被动一体化构型由于主动控制的作用,车辆系统的横–纵–垂向耦合度较小.在主被动一体化构型中,MOPSO–LQR控制更进一步降低了系统的耦合度,且4个车轮的振动能量分布更为平均,低阶固有频率进一步降低,高阶固有频率升高,有利于车辆系统平顺性的改善.
5 结论
1)LQR控制主被动一体化悬架构型相对于传统悬架构型,能一定程度的减小轮毂电机的振动负效应问题,改善车辆的操稳性与平顺性,但对轮胎跳动的抑制效果不明显,并没有彻底解决轮毂电机振动负效应问题.
2)MOPSO–LQR控制相对于经典LQR控制,能有效实现操稳性、平顺性以及安全性的全局最优.仿真结果表明,MOPSO–LQR控制能有效抑制轮胎跳动的恶化,且明显提升了其他控制目标的性能,在车身姿态控制上有较大的提升,车身振动耦合度明显降低,基本消除了轮毂电机的振动负效应问题.
3)基于MOPSO–LQR控制的主被动一体化悬架构型,提高了主动悬架的利用率,减小了作动器的作动力需求,降低了作动器的设计要求,间接提高了主动悬架的集成性,有利于电磁主动悬架的应用于普及.

表6 系统振动能量分布对比Table 6 System vibration energy distribution