北京自动驾驶车辆道路测试报告(2019)
2020-05-11吴琼
文/吴琼
截至2019年底,北京市道路测试安全行驶里程达104万公里,较上一年度增长577%,百度Apollo以近90万公里的成绩成为年度测试里程最长的企业。此外,测试车型、关键零部件的国产化进程也愈发明显。
一、概述
自动驾驶产业的发展离不开政策、标准、测试环境等方面全方位支撑。为促进自动驾驶技术发展,北京市自动驾驶测试管理联席工作小组持续督导中关村智通智能交通产业联盟、北京智能车联产业创新中心(以下简称“智能车联”)等不断完善标准建设、开放测试环境,解决企业从技术验证到商业化验证发展过程中的实际问题。
截至2019 年底,北京市已累计开放4 个区县的自动驾驶测试道路,共计151 条,503.68 公里;开放全国首个自动驾驶测试区域,面积约40 平方公里;开放全国首个车联网(智能网联汽车)和自动驾驶地图应用试点区域;累计为13 家自动驾驶企业77 辆车发放一般性道路测试牌照;首次为百度公司40 辆车发放了允许载人测试的联席审查意见;测试里程超100 万公里,整体安全可控。开放测试道路、区域、服务规模、测试牌照及测试里程均居全国第一。
(一)政策持续创新
2019 年12 月13 日,北京市自动驾驶测试管理联席工作小组发布《北京市自动驾驶车辆道路测试管理实施细则(试行)》(第三版)。
鼓励企业开展自动驾驶车辆商业化模式的探索。丰富测试内容,增加了载人、载物、编队行驶测试。
2019 年6 月,北京市自动驾驶测试管理联席工作小组发布了《北京市自动驾驶车辆测试道路管理办法(试行)》,鼓励各区县依据技术要求,因地制宜遴选测试道路,并允许选取开放自动驾驶测试区域。
2019 年9 月,自然资源部、工业和信息化部、北京市经济和信息化局、北京市规划和自然资源委员会共同启动车联网(智能网联汽车)和自动驾驶地图应用试点(以下简称“地图应用试点”)。

表1 北京市政策持续创新情况
2019 年12 月,自然资源部、工业和信息化部与北京市人民政府正式签约全国首个地图应用试点,并将地图应用试点落地国家智能汽车与智慧交通(京冀)示范区亦庄基地及北京经济技术开发区,智能车联作为试点依托单位,将在保障地理信息安全基础上,分阶段、分步骤地有序开展地图试点工作,推进我国自动驾驶地图政策、管理和技术等方面创新发展。
(二)标准不断完善
在北京市自动驾驶测试管理联席工作小组的指导下,北京市科委、中关村管委等单位的支持下,中关村智通智能交通产业联盟联合产业上中下游龙头企业、科研院所等,共同研制自动驾驶相关标准,解决产业发展中的瓶颈问题。联盟自成立以来,累计已发布8 项团体标准,已立项待发布1 项。其中,3 项被北京市认定为自动驾驶相关评价标准,1 项入选工信部百项团标,3 项被认定为“中关村标准”,并面向全国推广应用。
经长期自动驾驶封闭试验场测试及开放道路测试验证,标准不断更新迭代,已经取得良好的应用效果,智能车联作为标准重要参编单位,同时也是北京市自动驾驶道路测试第三方服务机构,积极推进标准成果转化,将联盟标准研究成果输出,2019 年度参与行业标准4 项,地方标准1 项。
(三)测试环境加快开放
2019 年度,持续推进自动驾驶车辆测试的“场(封闭试验场)—路(开放测试道路)—区(开放测试区域)”三级测试环境的建设与开放。
1.认定北京首个最高级别(T5 级)封闭试验场,支持更高级别测试需求
截止到2019 年底,北京共有封闭试验场地3 个。2019 年5 月,北京市认定了首个T1-T5 级别的封闭试验场地国家智能汽车与智慧交通(京冀)示范区亦庄基地。亦庄基地面积为650 亩,拥有高速、城市、乡村场景,覆盖京津冀地区85%以上的城市场景、90%高速公路场景,可满足12 米以下自动驾驶车辆以及无人配送、外卖、监管巡逻等轮式车的全天侯多气象条件的测试评估需求。
2.扩增测试道路,支持更多实际场景测试需求
2019 年,北京经济技术开发区、顺义区新增了107 条、380.68 公里的自动驾驶测试道路,公里数增加比例达309%。截止到2019 年底,已累计在海淀区、顺义区、房山区等地开放151 条、503.68 公里的测试道路。
3.开放测试区域,推进自动驾驶产品形态、应用场景、商业模式探索
2019 年,在北京经济技术开发区开放了全国首个40 平方公里的测试区域,可为自动驾驶车辆进行Robotaxi、接驳、分时租赁、编队行驶等商业模式探索提供测试环境。
4.加大V2X 设备部署,满足车路协同测试需求
2017 年,在北京市经济技术开发区已建设支持车路协同的测试道路12 公里(7 个路口)。2019 年,扩建到40 公里(36 个路口)。
截止到2019 年底,智能车联联合北京千方科技股份有限公司在中关村自动驾驶创新示范区环保园、北京经济技术开发区、北京CBD 等道路上已部署近百套V2X 设备。
5.创建全国首个车联网和自动驾驶地图应用试点,推进产业化
2019 年,依托北京市自动驾驶道路测试以及智能车联工作成果,全国首个车联网(智能网联汽车)和自动驾驶地图应用试点设立在北京经济技术开发区40 平方公里测试区及国家智能汽车与智慧交通(京冀)示范区亦庄基地(以下简称“亦庄基地”)。试点将加强5G、RTK 基准站地基增强网络、车联网等试验基础环境,全面支持自动驾驶产业创新。

表2 北京市测试牌照发放与道路测试情况
(四)测试牌照发放与道路测试情况
截止到2019 年12 月31 日,有13 家企业,涵盖6 家互联网企业、6 家主机厂、1 家地图厂商共计77辆车,参与了北京市自动驾驶车辆一般性道路测试,路测里程达104 万公里。申请企业数、车辆数、路测里程均位居全国第一。其中,2019 年度,有12 家企业,73 辆车参与北京市自动驾驶车辆一般性道路测试,并首次为百度公司40 辆车发放了允许载人测试的联席审查意见。
(五)应用示范情况
北京市已经在多区域的有条件园区或自动驾驶开放测试区规划自动驾驶与车联网应用示范。目前已经建设规划有北京经济技术开发区的智能网联汽车产业创新示范区、北京市海淀区的中关村自动驾驶创新示范区、北京市顺义区的智能网联汽车创新生态示范区、北京市房山区的5G 自动驾驶示范区、北京市智能网联汽车示范运行区(首钢园)(以下简称“首钢冬奥示范区”)。
其中,首钢冬奥示范区和中关村自动驾驶创新示范区环保园由智能车联与示范园区合作,于2019 年启动运行,示范园区内不仅建设5G 网与车联网,更涵盖无人接驳、无人物流、无人清扫、无人配送等商业运行场景,已实现多种自动驾驶车辆多场景示范运行。
北京经济技术开发区的智能网联汽车产业创新示范区作为目前唯一一个自动驾驶开放测试区,将在2020 年重点开展公开道路上的车联网(智能网联汽车)和自动驾驶地图应用试点、Robotaxi 等示范应用。
二、封闭试验场测试情况
(一)测试概况
2019 年,智能车联在封闭试验场内为30 余家国内外自动驾驶企业、科研团队、行业协会等提供了测试服务,服务时长超过4000 小时,封闭试验场测试里程超过7.36 万公里,累计测试里程14.36 万公里。

图1 首钢冬奥示范区规划图

表3 2019年/2018年获得牌照测试主体车型分析
2019 年,北京市发放了首个T4 级别道路测试牌照,获得T4 级别的测试车辆可在更为复杂的R4 道路开展测试。T4 级别能力等级要求自动驾驶车辆能够准确识别临时交通标志,需具备通过隧道、潮汐车道、坡道停车和起步、停车入库等复杂场景的能力,并对自动驾驶的感知、规划和控制能力也提出了更高的要求。
美团无人配送车首次通过了T/CMAX117-2018《服务型电动自动行驶轮式车技术要求》的测试,并在首钢冬奥示范区开展了示范运行测试。
智能车联通过星火计划累计向20 余家企业、科研团队、行业协会等提供1160 小时的优惠服务,为企业、科研团队节约研发资金达千万元。
根据封闭试验场统计,2019 年自动驾驶车辆出现依托车型国产化、部分关键零部件国产化,整车量产化,对高性能传感器依赖度降低等趋势。
1.依托车型国产化趋势明显
目前,绝大多数自动驾驶车辆是基于现有量产车型改装。2019 年,测试主体在改装车辆时选择国产车型的趋势明显增加。2018 年,获取道路测试牌照的国产车型有哈弗、蔚来、北汽新能源共3 款车型;2019 年,新增红旗、东风风光、WEY、比亚迪4 款车型,国产车型种类增长率达133%。
2.自动驾驶车辆量产化方案初现
2019 年,由百度和一汽合作生产的红旗E 界在北京开展测试,该车型从传感器布置、设备选型和整车布置等方面都已经进入小规模量产阶段,是目前在封闭试验场出现的专业性最强、集成度最高的测试车型。
3.部分关键零部件国产化,高性能传感器依赖度降低
目前,多数测试主体采用摄像头+毫米波雷达+激光雷达方案,其中激光雷达作为自动驾驶车辆的关键零部件之一,主要起到感知和定位的作用。2019年,测试主体在激光雷达品牌选择上开始向国产化靠拢,国产品牌占比由2018 年的20%提升至2019 年的40%。
2019 年,测试主体在激光雷达的线数选择上比去年也有明显降低,主激光雷达采用40 线(含)以下的比例从去年的50%上升到今年的73%。从目前的趋势来看,随着技术的不断革新发展及低线数传感器成本的逐渐下降,测试主体对高线数激光雷达依赖度逐渐降低,开始向低成本、可量产、可落地的方向发展。
(二)基础性能测试——感知
2019 年,智能车联同各测试主体在封闭试验场开展了车辆基础性能测试,包含感知性能测试、规划性能测试和控制性能测试。为企业在技术升级、性能优化、产品对标等方面提供帮助和建议。下面以感知性能测试举例说明。
1.儿童认知盲区测试
认知盲区测试属于感知性能测试中的一个子项,包含行人盲区、儿童盲区和标准粒度障碍物盲区测试,以下就儿童的认知盲区展开分析。保障弱势群体安全是自动驾驶测试原则之一,所以此项测试选取身高为120cm 的模拟儿童作为测试目标。
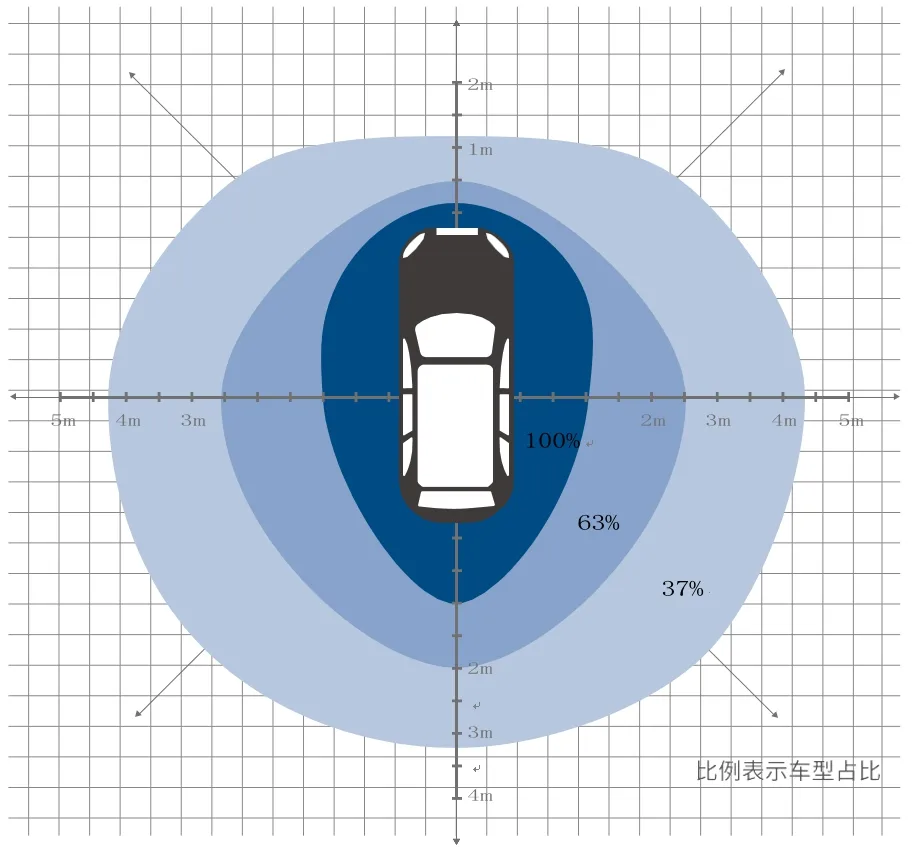
图2 儿童认知盲区示意图
测试数据显示,认知盲区较小的车型前方盲区在0.25m 以内,左侧和右侧盲区在1m 的水平。整体来看,整车盲区为非对称式分布,前部盲区要明显小于其他方向的盲区,左右两侧的盲区基本呈对称状态。大部分测试车型将感知重点放在车辆前方区域,其次是后方和两侧,此外不同车型方案之间的认知盲区差异较大。
影响车辆盲区大小的主要因素有自动驾驶传感器布置方案、传感器性能、感知算法等。和人类驾驶员相比,自动驾驶车辆具有感知范围广,不存在阶段性盲区和因疲劳等主观原因造成的感知短暂缺失的优点,且自动驾驶车辆对运动物体速度、位置的识别精度要远高于人类驾驶员。
2.前方最大认知距离测试
前方最大认知距离是指自动驾驶车辆可以稳定认知前方目标物的最大距离。测试数据显示,测试车型之间对于车辆的最大认知距离差异较大,在锥桶和模拟儿童的认知上差异较小,车辆和模拟行人认知距离都在50 米上,部分企业可达到百米以上。
自动驾驶车辆前方最大认知距离除受自身传感器性能和融合算法的影响外,还受目标物大小、高度、颜色、材质、运动状态等因素的影响。随着传感器性能的不断提高以及算法的迭代升级,未来自动驾驶的认知距离还有会更大的提升。
根据2019 年10 月美国汽车协会发布的AEB 系统模拟测试结果显示,白天成人身材的假人过马路时,参与测试的四款采用摄像头和毫米波雷达方案的量产车,在时速32 公里/小时的情况下只有40%的几率成功避免碰撞;在48 公里/小时工况下,全部车型均无法避免碰撞。数据显示,理论上中小型车辆在48 公里/小时的速度下安全停车时间为3 秒左右,距离为40 米。2019 年封闭试验场内参与感知测试的自动驾驶方案基本采用摄像头+毫米波雷达+激光雷达方案,前方稳定认知模拟行人距离均大于50m,因此将会多出近1 秒的反应和处理时间,可有效的避免碰撞,在保护交通弱势群体安全方面更为友好。
(三)自动驾驶可靠性测试
当前自动驾驶车辆主要基于现有量产车型改装,存在可靠性、稳定性差等问题。因此《北京市自动驾驶车辆道路测试管理实施细则(试行)》(第三版)规定,每批次自动驾驶车辆需在封闭试验场内完成累计不少于5000 公里的自动驾驶测试。通过完成第三方测试方布设的道路交通测试场景、长时间的负载运行,以验证自动驾驶车辆的可靠性、稳定性。
自动驾驶可靠性测试能够加速暴露设备、系统、车辆存在的问题。截至到2019 年,北京市封闭试验场内累计测试里程超过13.36 万公里,(除碰撞、危险场景等专项测试外)发生碰撞事故16 起,平均每车8350 公里发生一次碰撞事故。其中,冲出道路擦碰路边石或碰撞行道树8 起,刮蹭交通设施5 起,未及时躲避模拟行人发生碰撞2 起,碰撞其他交通参与车辆1 起。同时,测试过程中共发生软硬件故障34 次(可快速修复性故障未统计在内),平均每车3929 公里发生一次故障。未出现对测试人员造成损伤的安全事件。
多数事故是车辆定位异常、感知错漏、控制失调造成,以及部分驾驶员缺乏安全测试意识,事故形成前未及时接管车辆;软硬件故障主要包括激光雷达、摄像头等硬件故障以及系统卡顿、延时、死机等软件故障。总体来看,在仿真测试中较难发现造成这些问题的隐患,需要经过较长时间的实车测试,尤其是在恶劣环境,如高低温、视线或信号遮蔽、颠簸路面等环境下更容易发现隐患问题。这些隐患的发现和排除,为测试主体完善产品性能,提升产品可靠性提供了宝贵的经验。
近几年国外自动驾驶车辆事故说明,未经封闭试验场大量试验验证的自动驾驶车辆容易带来安全隐患,对产业发展造成不良影响。因此在技术成熟度尚未达到一定水平的情况下,利用封闭试验场地进行自动驾驶车辆的可靠性测试,是提升自动驾驶汽车技术水平和保障测试安全的必要途径。

图3 专项能力评估测试实拍
(四)专项能力评估测试
封闭试验场依据能力评估标准,根据测试主体申请的评估分级,以专项为单位对自动驾驶车辆进行逐个场景的测试,完整地验证了车辆在每个场景下的自动驾驶能力。
从专项能力评估测试的数据来看,以部分专项场景测试为例,首次测试中机动车信号灯识别及响应场景的通过率仅为78%,左侧行人通行起步和避让障碍物变道场景通过率分别为62%及56%。因此,自动驾驶车辆需要大量的模拟实际道路场景训练,以保证其在道路测试阶段具备一定的安全性。
在首次专项能力评估测试中,测试主体自动驾驶能力水平参差不齐,通过率越高,代表测试主体在专项测试中的表现越好,总体而言,开展了规模化道路测试的测试主体通过率较高。根据2019 年数据统计,首次专项能力评估通过率低于80%的测试主体占54%。
以左侧行人通行起步场景为例,该场景的通过率为62%,场景布设方法为,在测试车识别前方锥桶起步变道时,行人在左侧车道内通过,经过测试车所在位置,对测试车起步变道造成干扰。
测试主体未通过这个场景测试的原因主要有:未识别左侧的行人或未正确判断行人运动状态,与行人抢行,有碰撞行人的风险;起步时未开启左转向灯;未识别前方锥桶等。这些问题是由于车辆对行人、锥桶感知识别不稳定,车辆控制性能欠佳,缺少转向灯使用策略等造成。
基于专项测试中发现的问题,可以帮助测试主体更有针对性、更高效的优化自动驾驶系统。以亦庄基地为例,亦庄基地从京津冀地区常用交通信号灯中挑选了22 组不同制式安装在试验场,通过在模拟实际道路及高度浓缩的测试场景中不断调试,测试主体自动驾驶能力提升显著,场景通过率均达到100%。
(五)综合能力评估测试
综合能力评估反映自动驾驶车辆连续执行驾驶任务的能力和稳定性,测试采用一条完整路线将对应等级的专项场景随机组合串联。2019 年度,封闭试验场内共进行100 余次综合能力评估测试,发现并协助测试主体解决问题500 余项,为北京市自动驾驶道路测试的安全开展提供了有效的保障。

图4 封闭试验场发现的主要问题及占比
测试数据表明,封闭试验场地内发现的问题中,感知、决策、控制类问题占六成以上比例。主要原因为车辆在实际交通场景下,无法在多种干扰下完成对关键目标物的感知和追踪,以及基于正确决策后车辆无法准确执行系统下达的指令。此外定位偏差、传感器标定误差、算法冗余制度不完善以及高低温环境对测试车辆的表现也有一定影响。
三、开放道路测试情况
(一)测试概况
截止到2019 年底,北京市道路测试里程突破1,040,221 公里,增长577%。北京市道路测试总里程处于全国领先地位,道路测试过程安全可控,未对周边交通环境产生不良影响。
从测试主体测试地域覆盖来看,规模化测试主体的覆盖范围更为广泛;从技术路线来看,目前只有少数测试主体开展了网联功能测试。从测试意向来看,测试主体更倾向于在R3 级的道路上开展测试。部分测试主体在拿到T4 牌照以后,开始进入更为复杂的R4 级道路进行测试。
2019 年,R1、R2、R3、R4 级开放道路里程分别占8%、14%、74%、4%,道路测试里程分别占8%、5%、86%、1%。从开放道路里程与测试里程占比来看,各等级开放道路里程与测试主体测试需求基本匹配。
各区县开放道路测试里程反映各区县道路的使用率及测试主体对各区县道路的需求度。北京经济技术开发区由于地理位置及开放道路测试时间较早,测试里程最多,道路使用率最高。

图5 截至2019年底测试主体累计测试里程

表4 2019年道路测试脱离类别及脱离原因
(二)道路测试监管
保障道路测试的安全除了依靠严格有效的封闭试验场测试,完备的道路测试管理体系也不可或缺。2019 年6 月北京市发布《北京市自动驾驶车辆测试道路管理办法(试行)》,2019 年10 月,发布团体标准T/CMAX119-2019《自动驾驶车辆测试道路要求》及T/CMAX120-2019《自动驾驶车辆道路测试安全管理规范》。以上办法、要求、规范从规划选取道路、风险评估、测试主体、测试车辆、测试人员等方面,系统的保障了道路测试有序、安全开展。
为了满足北京自动驾驶车辆道路测试服务的需求,智能车联在北京市自动驾驶测试管理联席工作小组的指导下,开发了全国首套自动驾驶道路测试监管平台。该平台能够准确、客观、公正地记录自动驾驶车辆在实际道路测试中的行为,通过对监管数据的溯源、挖掘、分析,为北京市自动驾驶政策的改进与优化提供数据支撑,以此来保障自动驾驶车辆道路测试安全可控。
2019 年,通过对自动驾驶车辆道路测试监管,发现道路测试隐患295 次,纠正测试问题126 次,有力的保障自动驾驶道路测试工作安全有序推进,北京市自动驾驶道路测试依旧保持着零不良影响的记录。
(三)脱离类别及脱离原因分析
自动驾驶脱离是指自动驾驶车辆出现系统故障或遇到无法处理的场景时,车辆控制权限切换为人类驾驶员的事件。
脱离数据显示,86%的脱离由人为接管造成,这些脱离是由于测试人员更换数据记录设备、需重新规划路径或个人原因导致;14%的脱离是由于策略缺陷、人工安全防御、系统故障造成的关键脱离,这些脱离数据的价值要远远高于人为接管脱离。对关键脱离数据的积累和分析,搭建典型脱离场景,不断复现测试,可加速自动驾驶车辆测试效率,不断提高车辆在道路测试中的安全性,有利于行业共同提升自动驾驶技术水平。
从脱离类别和原因上看,除因传感器、车辆或者数据记录设备、地图标注、地图加载等问题外,与社会车辆的博弈、对复杂场景的理解以及一些应急情况的处理能力,仍然是自动驾驶亟需解决的重要课题。相比于2018 年,更多的道路测试里程也使测试主体获得了更多的脱离数据。这些脱离数据为自动驾驶适应复杂道路、不断提升技术水平积累了宝贵的经验。
