汽车内麦克风阵列布放位置优化方法研究*
2020-05-08郭庆王明杰徐翠锋苏海涛
郭庆,王明杰,徐翠锋,苏海涛
汽车内麦克风阵列布放位置优化方法研究*
郭庆,王明杰,徐翠锋,苏海涛
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
麦克风阵列在语音信号采集中被广泛应用,其布放位置直接影响语音信号的采集质量,所以提出了一种汽车内麦克风阵列布放位置的仿真优化方法。首先建立汽车模型,设置模型内各部分的材料和属性,然后在模型内放置声源和麦克风阵列进行仿真。通过仿真,可以得到阵列上麦克风场点在声源作用下的频率响应,再通过运算得出声源到麦克风场点的传递函数,最后利用不平坦度和平均幅值差对各麦克风场点的传递函数进行评价,分析汽车内麦克风阵列的最佳布放位置。
麦克风阵列;直接边界元;位置优化;空间域信息
随着汽车电子设备的发展,语音日渐成为汽车内人机交互的主要方式。对驾驶员语音信号的有效采集是语音信号处理的前提,它直接影响车载语音识别系统工作的准确性[1]。传统的语音信号处理是利用单个麦克风进行数据采集,根据信号的时域、频域信息对信号进行处理。随着信号处理技术的进步,20世纪70年代阵列信号处理技术被应用到语音信号处理当中。麦克风阵列采集到的信号不仅包含时域和频域信息,同时还增加了信号的空间域信息[2]。为了保证语音信号采集质量,需要对汽车内麦克风阵列的位置进行优化,所以本文提出了一种汽车内麦克风阵列布放位置的仿真优化方法,并利用仿真软件进行验证。
为了找到麦克风阵列在汽车内的最佳布放位置,本文利用LMS Virtual.Lab软件进行仿真,在汽车模型内放置声源和不同位置的麦克风阵列,其中麦克风阵列上包含5个等间距的麦克风场点。通过仿真可以得到麦克风场点在声源作用下的声压频率响应,经过换算得出声源到麦克风场点的传递函数,然后利用不平坦度和平均幅值差对场点的传递函数进行评价,从而确定麦克风阵列在汽车内最佳的布放位置,为驾驶员语音信号的有效采集提供保障。
1 阵列位置优化理论分析
汽车内部为一个箱体,驾驶员语音会在汽车内部发生反射和衍射,通过多条路径最终到达麦克风阵列,声源到麦克风阵列的声音传播路径如图1所示,其中麦克风阵列上包含5个麦克风场点。
汽车内语音信号的传播可以近似为线性时不变系统,在线性时不变系统中利用冲激响应来反映系统的性能。本文在仿真中利用单极子声源作为系统的输入,在声源作用下麦克风场点的声压频率响应作为系统的输出响应[3],利用输入和输出响应得到声源到麦克风场点的传递函数,其所近似的系统结构如图2所示。
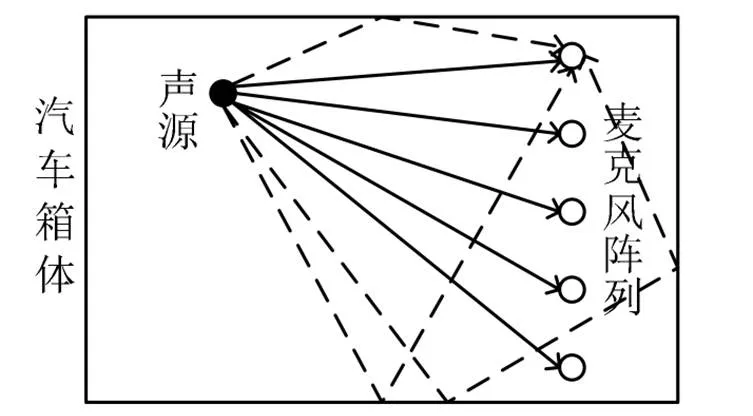
图1 语音信号传播路径示意图

图2 语音传播系统结构图
图2中()为时域下单极子声源信号,()为时域下麦克风场点的声压频率响应,()为系统的传递函数。系统的输出可以表达为:
()=()×() (1)
()=()() (2)
式(1)(2)中:(),(),()分别为(),(),()的频域表示,从而可以得到系统的传递函数为:
()=()/() (3)
在线性时不变系统中可以通过分析系统冲激响应来评价系统的性能[4],所以,本文对声源到麦克风场点的传递函数进行评价,分析麦克风场点位置的优劣,最终得出汽车内麦克风阵列的最佳布放位置。
2 汽车内麦克风阵列响应仿真及评价
2.1 汽车内麦克风场点响应仿真
利用Virtual.Lab中的声学仿真模块Virtual Lab acoustics进行仿真,因为汽车模型内部是一个封闭的模型,所以选择声学模块下的直接边界元法对声学响应进行计算[5],仿真使用的汽车模型如图3所示。

图3 汽车模型图
本文以驾驶员语音信号处理为例进行仿真,将单极子声源放置在驾驶员头部位置模拟驾驶员语音。汽车模型由多个部分组成,对模型内各部分进行分组,设置不同组的材料和吸声属性,使汽车模型内各部分对声音的传递更切合实际。在汽车模型内放置麦克风阵列,麦克风阵列有多种拓扑结构,本文选择均匀线性麦克风阵列进行仿真,阵列上包含5个间距为20 cm的麦克风场点。考虑到实际驾驶情况,麦克风阵列的布放位置主要有2个:驾驶员前方偏上的挡风玻璃最上端(麦克风阵列A)、驾驶员前方偏下的仪表盘位置(麦克风阵列B)。汽车模型内声源和麦克风场点布放位置如图4所示。通过仿真可以获得麦克风场点在声源作用下的声压频率响应,从而可以得到声源到麦克风场点的传递函数,通过对场点传递函数的评价分析麦克风阵列的最佳布放位置。

图4 麦克风场点布放位置
2.2 评价方法
麦克风阵列所采语音信号要在不失真的情况下进行处理,这要求声源到麦克风场点间的传递函数具有平坦的响应幅度,选择不平坦度对麦克风场点的传递函数进行评价。因为人对声音信号的相位不敏感,所以本文不评价传递函数的相位。这里利用信号的方差反应信号的不平坦度,其数值越小表示场点的传递函数越平坦,则不平坦度为:

式(4)中:为麦克风场点传递函数的不平坦度;为场点传递函数上各频点的幅值;为场点传递函数上所有频点幅值的平均值;为场点传递函数的频点数。
在声源作用下,麦克风阵列所采信号的幅值越大说明信号的衰减程度越小,越有利于语音信号的处理,所以本文利用平均幅值差对麦克风场点的传递函数进行评价。平均幅值差可以有效反应两个对应麦克风场点的传递函数在单个频率点上的平均幅值差距,其计算公式为:

式(5)中:max为场点传递函数的最高频率;△为麦克风场点传递函数的频率步长,20 Hz;iy为麦克风阵列A上第个麦克风场点在频率为时的传递函数幅值;iy为麦克风列阵B上第个麦克风场点在频率为时的传递函数幅值。
3 仿真数据分析
通过仿真,可以获得麦克风场点在声源作用下的响应信号,然后利用式(3)得到声源到麦克风场点的传递函数。利用不平坦度和平均幅值差对各场点的传递函数进行评价,对比麦克风场点对声源信号采集的性能,确定汽车内麦克风阵列的最佳布放位置。
数字电话机的国际通信标准是300~3 400 Hz,但是实际人声频率最低可达20 Hz[6],且人讲话的频率主要集中在20~1 200 Hz,所以本文讨论的语音频率范围有20~3 400 Hz、20~1 200 Hz。本文在对比分析麦克风场点的传递函数时,利用汽车模型中不同阵列相对应的场点进行比对(图4中标号为A1和B1的场点为一组进行对比,标号为A2和B2的场点为一组进行对比,标号为A3和B3的场点为一组,标号为A4和B4的场点为一组,标号为A5和B5的场点为一组进行对比)。
3.1 频带为20~3 400 Hz麦克风场点的传递函数分析
当频带为20~3 400 Hz时,对应麦克风场点的传递函数对比曲线如图5所示(图例为麦克风场点标号)。计算麦克风阵列上场点传递函数曲线的不平坦度和平均幅值差,计算结果如表1所示。
从图5和表1中可以发现,麦克风阵列A的5个场点的传递函数曲线平坦度较优。麦克风阵列A上标号为A1、A2、A3、A4的麦克风场点传递函数幅值小于同组的麦克风阵列B上场点的传递函数幅值(平均幅值差为负数),麦克风阵列A上标号为A5的场点传递函数幅值大于同组的麦克风阵列B上场点的传递函数幅值(平均幅值差为正数),同时两个麦克风阵列平均幅值差数值很小,其平均幅值相近。
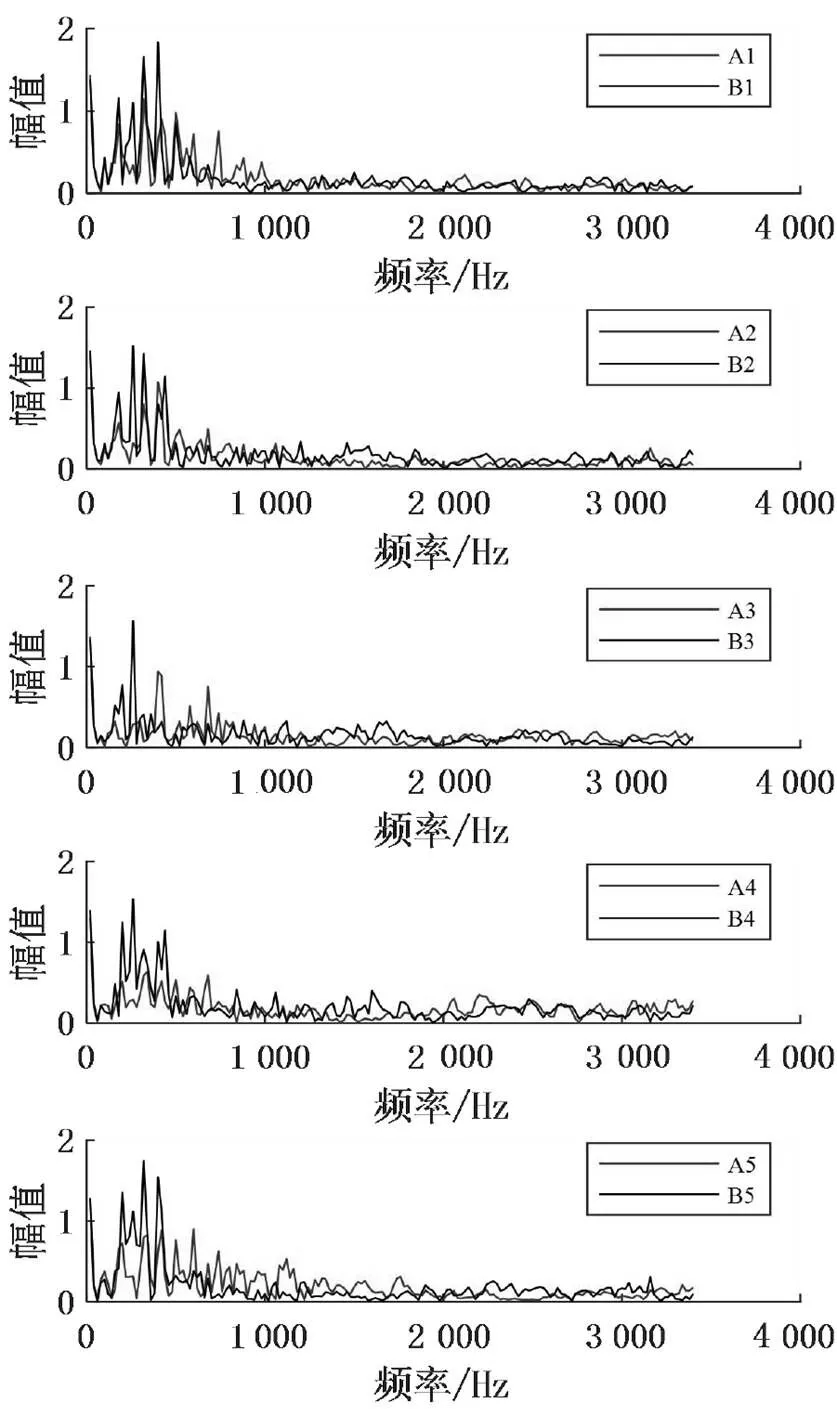
图5 20 Hz~3 400 Hz场点的传递函数应曲线
表1 20~3 400 Hz场点传递函数的评价参数值
对比组场点标号不平坦度平均幅值差 第一组A10.045 1﹣0.001 B10.068 3 第二组A20.0312﹣0.039 9 B20.052 1 第三组A30.024 3﹣0.003 4 B30.031 2 第四组A40.020 7﹣0.024 5 B40.053 4 第五组A50.038 30.004 8 B50.070 5
3.2 频带为20~1 200 Hz麦克风场点的传递函数分析
人在交流的时候语音频率主要集中在20~1 200 Hz,各麦克风场点在20~1200 Hz频段内的传递函数曲线如图6 所示。对应20~1 200 Hz频带内各场点的传递函数曲线的不平坦度和平均幅值差如表2所示。
从图6和表2中可以发现麦克风阵列A的场点传递函数曲线的不平坦度数值较小,说明麦克风阵列A的场点传递函数比麦克风阵列B的场点传递函数更平坦。幅值方面,麦克风阵列A上标号为A1、A3和A5场点的传递函数幅值大于同组的麦克风阵列B上场点的传递函数幅值,标号为A2和A4场点的传递函数幅值小于同组的麦克风阵列B上场点的传递函数幅值。
4 结论
本文提出了一种汽车内麦克风阵列布放位置的仿真优化方法,通过对麦克风阵列布放位置的优化,实现对声源信号的有效采集,为后面语音信号的处理提供有力的支撑。以驾驶员语音的采集为例进行仿真,分析麦克风阵列的最佳布放位置,通过对两种频带下麦克风场点传递函数的评价,得出如下结论:在各频带下麦克风场点的传递函数具有类似的规律,从平坦度的角度看,麦克风阵列A的场点传递函数优于麦克风阵列B的场点传递函数。从幅值的角度看,麦克风阵列A上有的场点传递函数幅值大于同组的麦克风阵列B上场点的传递函数幅值,有的则小于同组的麦克风阵列B上场点的传递函数幅值,且整体上两个麦克风阵列的平均幅值相近。综合考虑评价结果,麦克风阵列应该安装在汽车内前挡风玻璃的最上端,即麦克风阵列A的位置,该位置更有利于采集驾驶员语音信号。
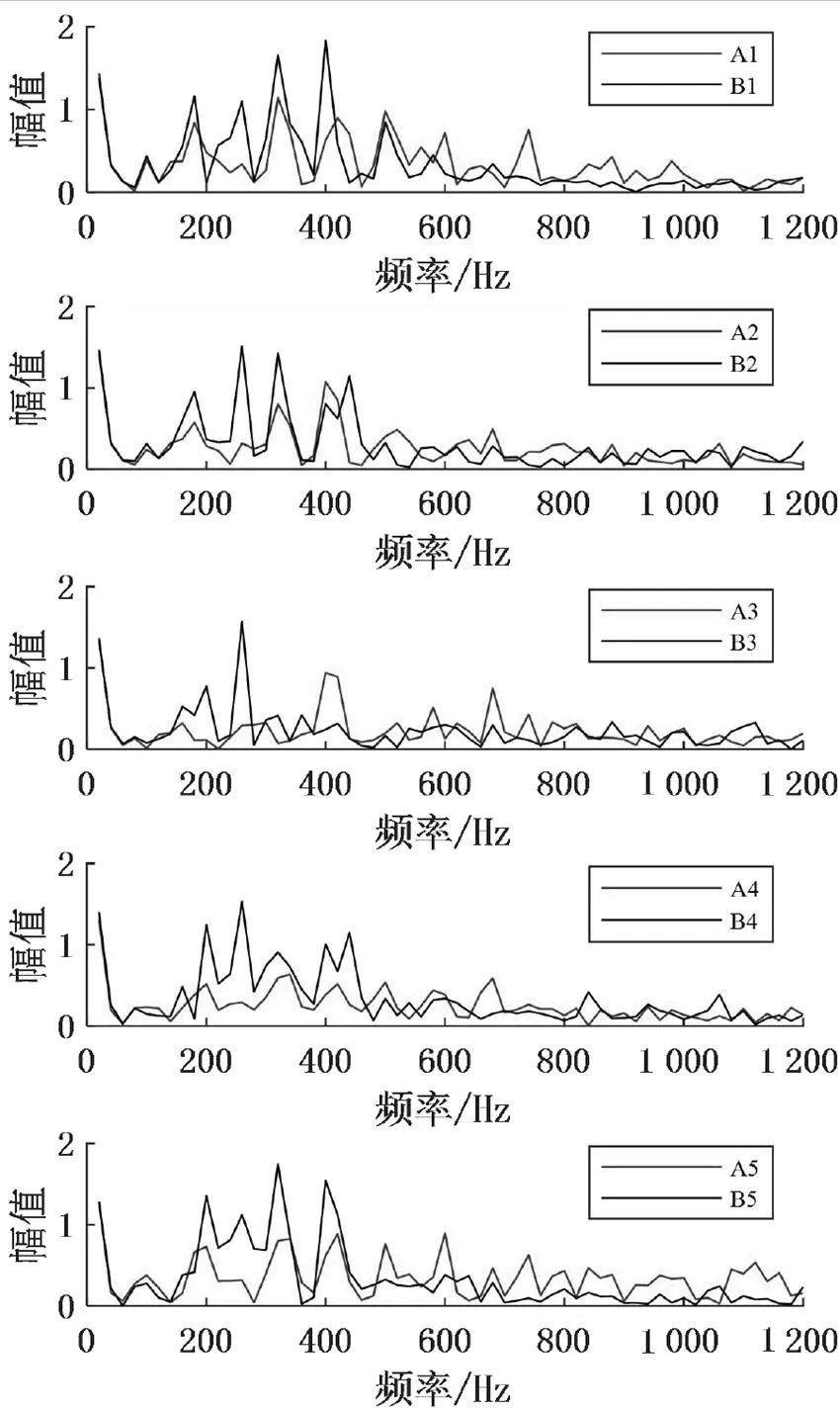
图6 20 Hz~1 200 Hz场点的传递函数曲线
表2 20~1 200 Hz场点传递函数的评价参数值
对比组场点标号不平坦度平均幅值差 第一组A10.084 80.008 7 B10.154 3 第二组A20.062 9﹣0.041 6 B20.117 3 第三组A30.055 10.000 3 B30.071 7 第四组A40.040 8﹣0.081 B40.118 1 第五组A50.0640.015 6 B50.161 7
[1]李政仪,宫二玲,曹孟华.圆形平面麦克风阵列构型的优化设计方法[J].传感器与微系统,2019,38(10):15-17,24.
[2]陆振宇,何珏杉,赵为汉.关于多通道语音去噪的识别优化研究[J].计算机仿真,2016,33(6):315-320.
[3]潘立登,潘仰东.系统辨识与建模[M].北京:化学工业出版社,2004.
[4]WANG Q G,GUO X,ZHANG Y.Direct identification of continuous time delay systems from step responses[J].Process Control,2001(11):531-540.
[5]刘昕洋.基于LMS Virtual.Lab的窗体及墙体声学特性分析[D].南昌:南昌航空大学,2016.
TN641
A
10.15913/j.cnki.kjycx.2020.08.012
2095-6835(2020)08-0033-03
广西科技基地和人才专项“电动扬声器异音智能检测与自动分类系统开发”(编号:桂科AD19110026);广西自然科学基金青年基金“基于听觉感知改善汽车内声品质的主动控制算法研究”(编号:2016GXNSFBA380117)
郭庆(1962—),男,陕西武功人,学士,教授,主要研究方向为嵌入式测控系统、微信号检测技术、虚拟仪器。
〔编辑:张思楠〕
