基于RGRS的空域划设问题研究
2020-04-22黄兴龙张一鸣
文 秘,方 强,黄兴龙,张一鸣
(1.空军指挥学院 研究生大队,北京 100097;2.中国人民解放军66133部队,北京 100097)
空域划设问题直接关系到空域使用效率和安全,从而影响作战效能和经济效益,不论在军航还是民航都是研究的热点。目前,空域划设主要有两种思路[1]:一是从上向下划设,以基于最优化理论的“排样”法为典型代表。该算法将空域划设问题抽象为一个多维“下料”问题,结合最优化算法,得到空域划设方案。二是从下向上划设,以网格“生长”算法[2-3]最为突出。该算法是在空域离散化的基础上,从初始生长点,按照一定的信息素条件进行临近生长,直至实现空域的完全划分。两种思路各有其特点。近年来,网格“生长”算法由于更贴近划设实际、算法过程明晰等特点,得到了更广泛应用和研究。
一般的“生长”算法[4-5],网格选择任意,缺乏实际意义,不能与地图相匹配,信息素收集困难;且生长网格没有嵌套效应,需专门设计边缘平滑算法。弧度制全球网格系统,用等弧度划分替代等角度划分,用十进制代替六十进制,采用单一尺度均匀划设而非多尺度划设,形成了以网格为单元的全新地理空间计算和管理框架,极大地简化了空间计算。基于弧度制网格剖分的改进“生长”算法,信息素收集方便,使用算法嵌套平滑边缘,能极大提升空域划设效率。
1 弧度制全球网格
全球网格参考网格系统是一种科学的、简明的、全球统一的刚性定位网格参照系统,比较常见的是MGRS和GARS[6-7]。MGRS与GARS网格系统,在目标定位和区域协同方面各有其优势,但存在共同缺陷:① 采用角度制,计算复杂。角度制是一种六十进制的计数方法,与日常生活的十进制区别较大,带来计算和认知麻烦;② 划分具有多尺度效应。两种网格都是等度、等分、等秒划设,但间隔尺度不一。如在GARS中,划分为30′、15′和5′的3个层级[8-10],实现网格向下 “四等分”和“九等分”,这种尺度差异给跨网格(空域)组合和拆分带来极大的困难。弧度制网格参考系统,采用弧度制和“百等分”方法,将角度和距离统一起来,并实现十进制计算,克服了MGRS与GARS网格系统的不足。
1.1 弧度制网格构建
弧度制网格系统,按照“确定地图基础和坐标系——确定划分规则,进行全球划分——确定编码规则,对剖分进行编码”的步骤进行网格系统构建[11,12]。
1.1.1确定地图基础和坐标系
以经纬度坐标体系为依据,采用圆柱投影中的横轴墨卡托投影,按照西经180°经线展开形成平面地图为划分基础,它的坐标范围为:西经180°至东经180°;南纬90°至北纬90°,将其转换为弧度制为:经线(-π,π);纬线(-π/2,π/2)。若以180°W90°N(南极点)为原点,180°W经线方向为y轴,垂直于180°W经线方向为x轴,建立平面直角坐标系,则相应的坐标范围变为:x轴方向(0,2π);y轴方向为(0,π),如图1所示。由于π值近似等于3.14,因此坐标范围又可描述为:x轴方向(0,6.29);y轴方向为(0,3.15)。

图1 弧度制坐标系统
1.1.2确定划分规则,进行全球划分
弧度制网格剖分,以原点为起点,向东和向北,按照0.01 rad×0.01 rad进行划分,形成628×314个一级网格,网格大小为64 km×64 km。依次对上一级网格进行10×10等分,形成第二、三、四、五、六级网格(见图2),后一级网格尺寸是上一级尺寸的1/10,面积为1/100,维持十进制关系。弧度制能使角的集合与实数集合R存在一一对应关系,一个完整的圆的弧度是2π,即2π rad=360°,因此1 rad=57.3°。弧度制不仅能将角度和距离度量统一到十进制,而且能够极大的简化弧长(距离)的计算:L=α(弧度)×R(半径)。

图2 RGRS剖分及编码示意图
1.1.3确定编码规则,对网格进行编码
按照弧度制网格剖分规则,全球可划设628×314个一级网格。一级网格编码按照“序号不足三位补足三位数”的编码规则,构成XXX-YYY的结构,则网格坐标轴范围为:纬线方向000~628;经线方向000~314。如图2中阴影部分的一级网格的编码为“627-309”,二级至六级编码,按照“10×10”坐标点的方式进行“分层—交叉”编码,图2中的二级编码为“2-3”,三级编码为“8-6”,则一个完整的精确到三级网格的编码为“627-309-2-3-8-6”,亦可简写为“627-309-23-86”。
1.2 网格信息素矩阵
地球是一个椭球体,两极稍扁,赤道略鼓,半径长度均值约为6 400 km,由此可得弧度制全球网格系统基础网格层级及精度,见表1。一个完整的网格编码长度等于“4+2×级数”,第六级网格的完整编码有16位,通常划分到三级(10位),区域精度为“640 m×640 m”,已经能够满足绝大多数区域定位和协调需求。

表1 RGRS基础网格层级及精度
以不同精度的弧度网格作为存储空间数据的“抽屉”,把多源异构数据规则地放置到“抽屉”中,不同数据之间通过网格编码有机地关联在一起,由此可实现多源异构数据在空间特征上的关联整合,这些“抽屉”和信息数据共同构成了网格信息素矩阵。在图2中,弧度制全球网格参考系统的一级网格,构成了一个628×314的信息素矩阵A;二级网格构成了一个6 280×3 140的信息素矩阵B;三级网格构成了一个62 800×31 400的信息素矩阵C。

(1)
式(1)中:∀i∈[1,618];∀j∈[1,314]; ∀k,l∈[1,10];sum+(·)算子表示信息素矩阵所有元素值求和。利用多颗粒度的信息素矩阵,能够实现区域定位和数据的存储计算。
2 弧度制网格空域划设
区域生长算法[2-3],是一种经典的基于区域的图像分割方法,是一种根据事前定义的准则将像素或子区域聚合成更大区域的过程,其实质就是按照一定的规则(如性质相似)把像素连通起来,从而最终构成分割区域。本文中将区域生长算法应用到空域划设,将弧度网格单元统计数据(信息素)作为“像素值”。
2.1 空域划设数学模型
空域生长算法是从初始点网格出发,向四周不断的生长合并其他网格,最终实现对区域网格的完全划分。划分的过程中始终坚持各划分区域之间信息素均衡。由此可得,基于弧度网格的空域划设数学模型为:
MIN=VAR(Zi)
s.t.

(2)
式(2)中:i表示优化划分的第i个区域;j表示空域内第j个网格单元;n表示空域内的所有网格单元个数;m表示区域划分总数;Ni表示与网格单元j相邻的网格单元集合;xij∈{0,1}表示网格单元j是否属于区域i;yi∈{0,1}表示存在第i区域输出时为1,否则为0;Zi表示第i个划分区总信息素。
目标函数表示各划分区块信息素应当均匀;约束条件1确保了每个空域网格单元只能归属于一个分区,即反映了分区不能交叉重叠,也不能留有空隙的约束;约束条件2确保所划分的分区大小和形状合理;约束条件3确保扇区内所有网格单元是相连的,满足了分区连续性约束;约束条件4保证所有网格单元被划分出去,不会有剩余网格存在。
2.2 改进区域生长算法
区域生长算法是建立在区域网格化的基础之上,有三个关键步骤[4-5]:
1)种子点的选取。选择一组能正确反映所需区域特征的点。一是种子点的数目m,即空域划设的数目;二是种子点的位置,该问题可选择航迹点密度最大的前m个网格作为种子点或者随机选择。

3)确定区域生长的终止原则。所有的网格都分配完毕。
以基于航迹点密度的空域分割为例,改进生长算法的具体步骤为:
步骤1根据划设区域范围,建立划设区一级网格坐标系统;根据划设精度,确定弧度网格最终等级Num;
步骤2统计当前等级网格系统中,每个网格的信息素,确定划设分区数目及相应初始生长点;
步骤3从每个初始点所在单元网格出发,搜索相邻单元网格中信息素最小的网格,并将其信息素与相应生长点的信息素相加,形成待生长区;
步骤4比较各待生长区总信息素,找到其中信息素最小的待生长区,合并其网格及信息素,作为下一轮生长的初始生长点,释放其余待生长区;
步骤5重复步骤3、步骤4,直至找不到还未分配网格,完成该级网格划分;
步骤6判断网格等级是否达到Num;若没有达到网格等级要求,则根据该级网格划分确定的划分边界,依次对每一个边界网格10×10剖分,形成下一级网格坐标系统,选出该系统中最靠近相应分区的点作为新的生长点,转到步骤2;若达到网格等级要求,转到步骤7。
步骤7对网格边沿进行平滑,完成空域划设。
假设任意网格单元为Bij,共N个;分为M个区块;每个区块的种子单元为Zijk,k∈[1,M];第k个区块集合为Qk,显然Zijk⊂Qk;第k个区块的临近区块集合为Lk={与k区块相邻且未分配的Bij},Bijk表示集合Lk中信息素最小的网格,则一个层级网格的算法流程如图3所示。
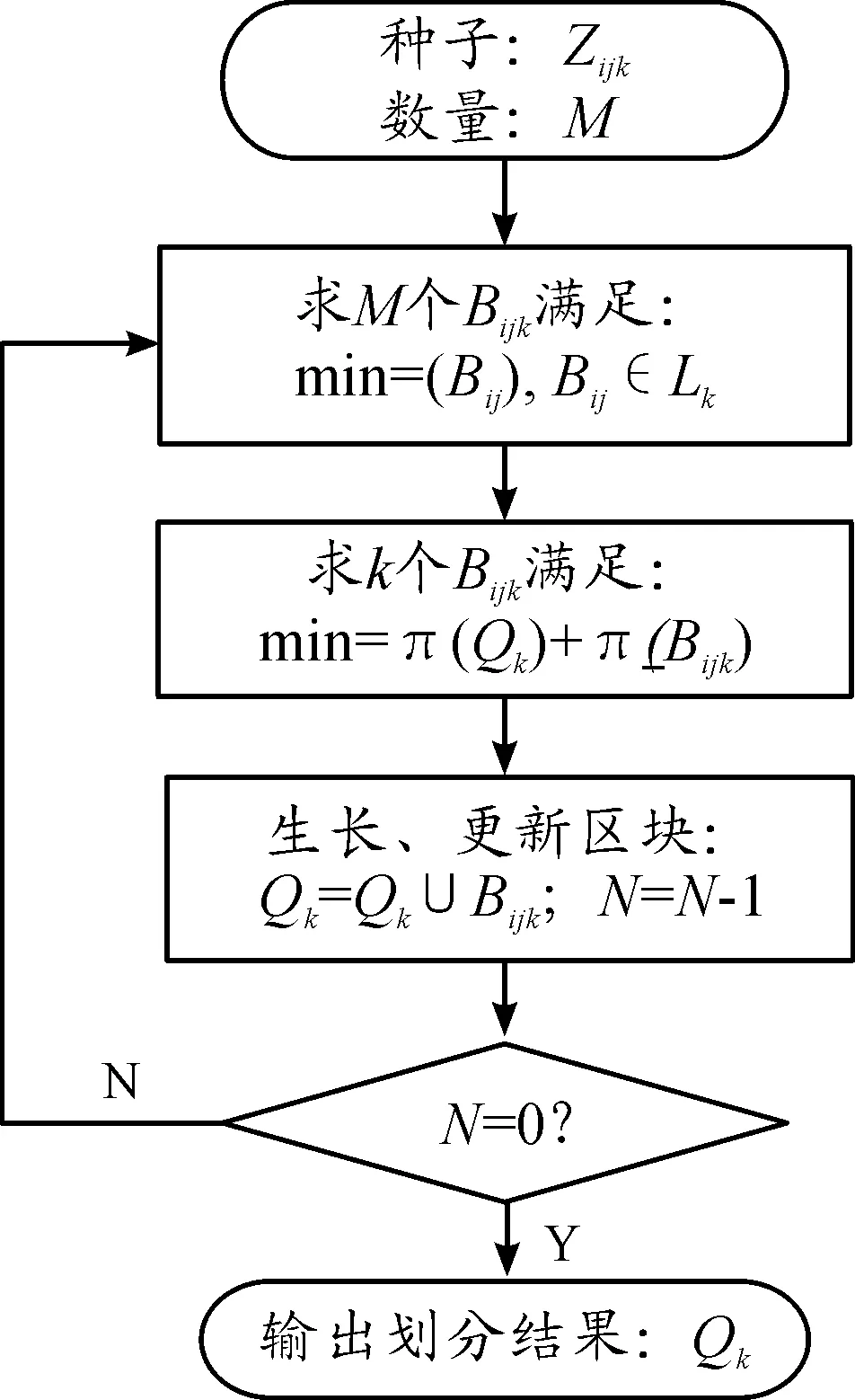
图3 改进生长算法流程
由算法步骤和流程图,得到改进生长算法与原生长算法[2-3],见表2。

表2 改进生长算法与原算法
3 空域划设仿真
以某地区空战场管制空域划设为例,该空战场覆盖的区域是一个由A1~A5(顺时针)五个顶点构成的多边形区域,各顶点的经纬度坐标已知,则按照弧度制网格编码规则能够计算出对应的网格编码,见表3。

表3 区域顶点坐标及所在网格编码
按照弧度制剖分规则,进一步将待划设的对多边形区域进行栅格化,形成13×13个一级网格组成的栅格化区域,精确度为64 km×64 km,如图4所示。
根据作战计划,特别是航迹规划信息,可以得到航迹点统计数据,由于保密原因,以随即产生一组信息素矩阵A为条件进行仿真实验,表4为一组随机信息素矩阵A数据。

图4 多边形区域及栅格化

表4 信息素矩阵A13×13
随机选择A(3,4)(对应弧度网格519-213)、A(6,11)(对应弧度网格526-210)、A(8,9)(对应弧度网格524-208)三个点,作为初始生长点(表3中被框选的位置),按照2.2节的改进生长算法进行空域分割。
经过一次空域生长,得到了一个大体的分区划设结果,如图5所示。显然,该结果并不能满足分区空域满足凸约束的条件,因此需要对其边缘进行调整。将三部分空域区块的边缘部分网格进行向下一级剖分,每个网格重新形成10×10个二级网格,精确度为6.4 km×6.4 km,然后按照2.2节的改进生长算法对每个边缘网格再进行一次空域分割,并进行边缘平滑,得到最终的分区划设结果,如图6所示。

图5 一级网格尺度下空域分区划设结果

图6 边缘平滑及最终分区
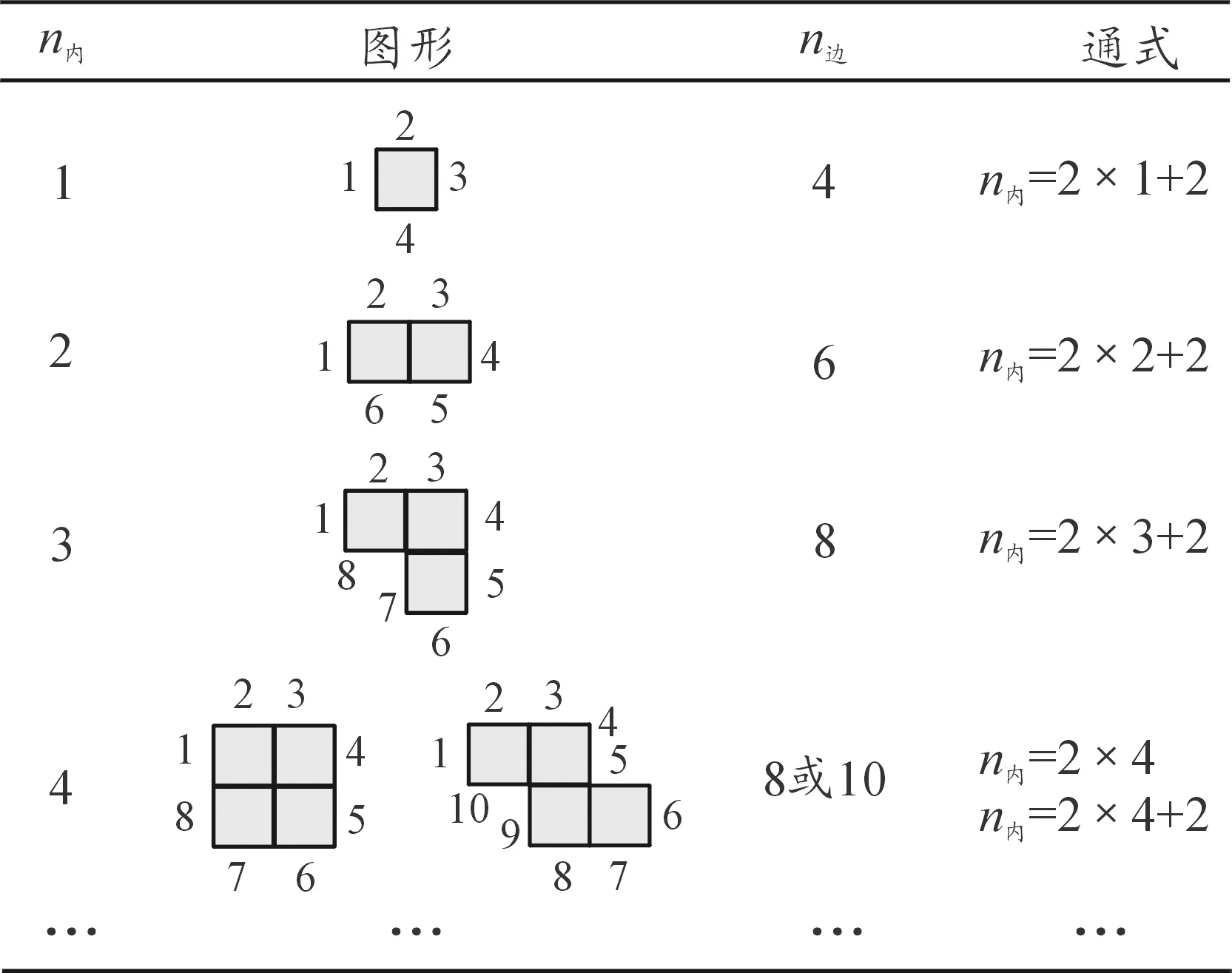
由生长算法的流程可以看出,算法复杂度和对于系统资源的消耗主要集中在本文2.2节步骤3(改进算法与原算法共有):搜索生长区边界最小信息素单元网格。以按照四个方向生长为例,可以归纳统计出边界单元网格数目n边与区域内部网格数目n内的关系,如表5所示。
由表5可以得到:n边≥2n内,当n内较大时n边≈2n内。从初始生长点生长到n内网格点的区域的过程中,需要进行的边缘搜索的总次数为:S=n内(n内+1)。若待生长区域总网格数为n,区域划分块数为N,每个区块所包含的网格数为n/N,则区域划设总边缘搜索总次数为:n2/N+n,对于一个固定的问题N为定值,则该算法的复杂度由n2/N决定。因此,对于本文空域划设问题,提升效率的计算方法如下:
(3)
式(3)中:ρ表示提升的划设效率;λ内表示多边形内网格数量;λ边表示多边形内部各分区之间的边界所包含的网格数量;乘数100表示将当前网格划分为100个次一级网格。在该问题中划设效率大概提升了90.4%,效果明显。
表5 边缘网格数目计算
4 结论
本文提出了基于弧度制的全球网格系统,并将其应用于空战场管制空域划设。利用弧度制网格参考系统的全球剖分、十进制和多颗粒度特性,对空域划设生长算法进行了改进。仿真实验表明,该方法信息素收集方便,嵌套平滑边缘,能够极大的提升空域划设的效率。
