轻型无人作战系统机电联合仿真
2020-04-22黄金斗王永娟管小荣
黄金斗,司 访,王永娟,管小荣
(南京理工大学 机械工程学院,南京 210094)
无人作战系统能够大幅降低士兵伤亡,逐渐成为世界各国未来轻武器发展的主流方向。轻型无人作战系统是一个典型复杂机电系统,机械部分主要包括枪塔、作战载荷、动力传动机构等,电气部分主要包括驱动器、伺服电机、位置控制器等。以往无人作战轻武器的设计过程为机械系统和电气系统单独设计,两者只能依据物理样机试验结果,分析判断所存在的问题,再重新修改设计,修改后再次进行样机验证,直到满足设计指标为止。在此过程中忽视了各系统之间的匹配性对整体性能的影响。近年来使用不同种类的仿真软件联合仿真,缩短复杂机电系统的研制周期,降低研制成本成为无人作战系统发展过程中重要的技术保障。
毛保全较早地提出将ADAMS和Matlab的联合仿真应用于遥控武器站的设计中,并提出一套较为完整的仿真流程[1]。马吴宁采用多柔体系统动力学与伺服控制联合仿真的方法,预测轻型武器站作战使用过程的动力学扰动因素变化规律和影响程度,为提高轻型武器站稳定搜索、跟踪瞄准和发射响应补偿等控制性能提供分析依据[2]。
本文分别研究基于ADAMS的多体动力学建模方法和基于Simulink的伺服控制系统建模方法,以现有的ADAMS和Simulink软件接口,建立某轻型无人作战机电联合仿真模型,研究机电协同设计及联合仿真方法,分析机械部分与电气部分之间的相互关系。
1 某轻型无人作战系统动力学建模
多体动力学建模过程主要包括建立模型、确定约束关系、添加载荷及驱动和模型验证四大步骤。本研究以某轻型无人作战系统为研究对象,根据研究内容简化模型并对模型作如下假设:
1)分析机械系统与电气系统之间的关系,不考虑各零件的小变形,因此假设机构中除了弹簧外各构件均为刚体,各零件之间均视为刚性连接;
2弹丸在枪管内部运动时,枪和弹可视为一个整体,因此不考虑射击时弹丸的运动,和弹丸与枪管间的相互作用力;
3)在不影响仿真结果的前提下,忽略部分非重要零件,以降低模型的复杂程度;
某轻型无人作战系统是复杂的机械系统,系统结构由火力系统、底座、托架、模块化通用武器架、高低伺服电机及减速器、方向伺服电机及减速器等组成,结合枪塔实际运动形式,基于ADAMS建立无人作战系统的多体动力学模型如图1所示。其中枪械主动力气室压力通过布拉温经验公式计算后通过函数添加到枪机框上,高低电机和方向电机主动力由Simulink控制。
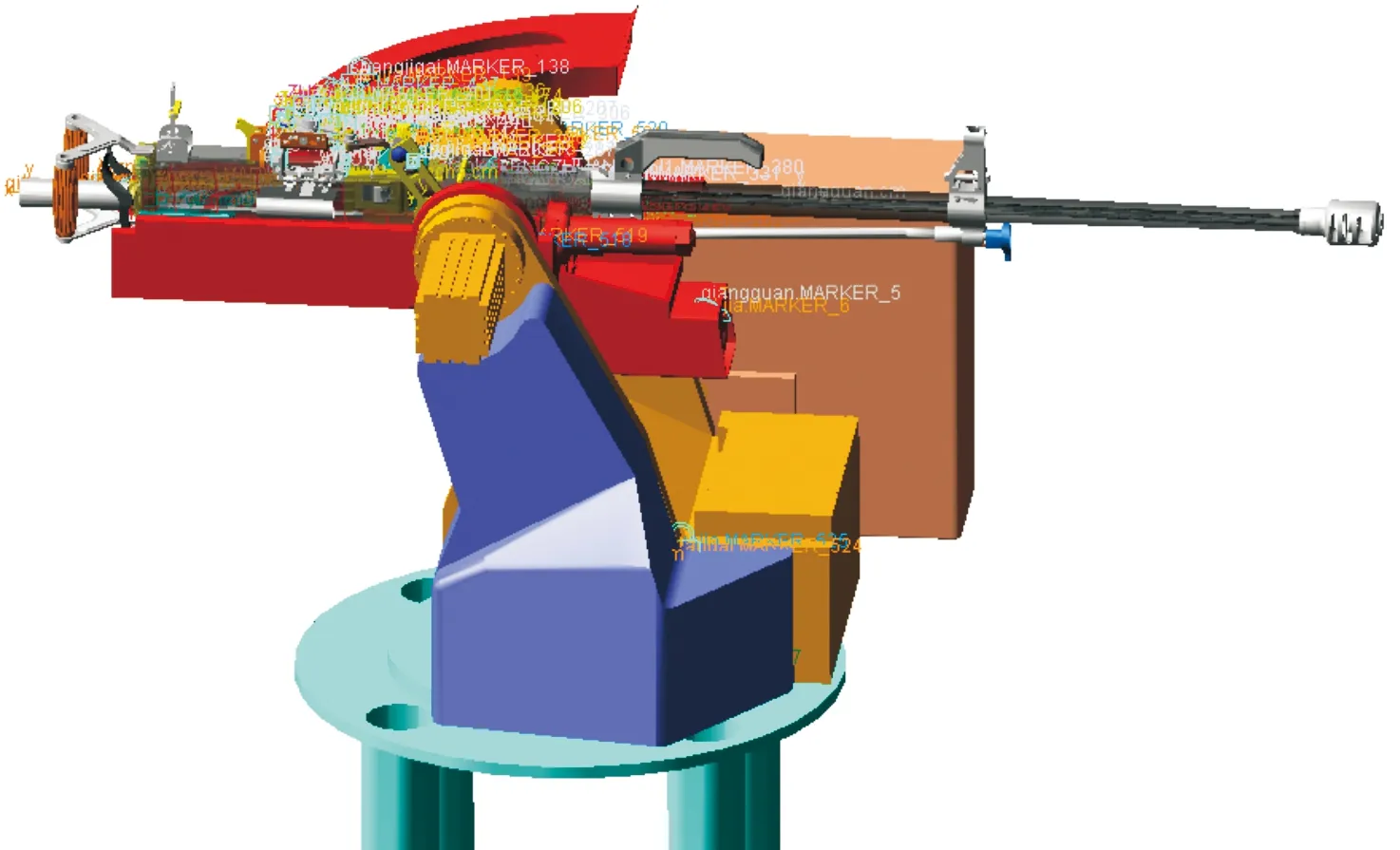
图1 枪塔多体动力学模型
为验证虚拟样机模型的正确性,取其中最关键的火力系统进行多体动力学仿真,仿真过程采用脚本控制,仿真时间设置为0.35 s,设置发射4发子弹,仿真步数为5 000步。如图2~图4所示,分别为枪机框所受气室压力,位移随时间变化的曲线和枪机框位移随时间的试验数据曲线[3]。
仿真结果中,枪机框的最大位移约为210 mm,与试验数据基本相同。复进到位速度约为6 m/s,比试验数据稍大,主要是由于仿真状态相对较为理想,自动循环过程中能量消耗比实际情况小,并且在仿真中,将气室压力等以外力的形式加载在仿真模型上,模型受力与实际受力情况存在一定差别。但总体来看,仿真结果基本符合实际情况,因此认为机枪动力学模型正确。

图2 枪机框受燃气冲力曲线

图3 枪机框位移曲线

图4 枪机框位移试验数据曲线
2 电气控制建模
轻型无人作战系统的电气系统以永磁同步电机为核心,辅助以给永磁同步电机提供电能的电压型PWM逆变器、用于确定电流相位的磁极位置检测器构成系统的基本结构、用于电流控制的电流传感器和电流控制器、速度和位置控制器和检测器[4-10]。
本研究采用位置环模糊自适应滑膜控制以获得较好的控制系统鲁棒性。模糊滑模控制器系统参数精度要求低,因此在图5所示的位置伺服控制系统中,将电气部分按理想状态考虑,把机械部分全都考虑成刚性体,将速度环系统的传递函数等价为:
G(s)s=K/(1+τms)
式中:K表示速度环的增益;τm=L/R表示速度环的时间常数。速度环通过减速器与位置输出相连,相当于乘以一个积分环节:1/(is),其中i为减速比。因此系统的开环传递函数可写为:
则可以得到位置滑模控制系统结构如图5所示。

图5 位置滑膜控制结构简图
无人化作战轻武器控制系统永磁同步电机采用矢量控制的方式,图6给出了基于矢量控制的无人化作战轻武器位置伺服系统控制原理。根据位置伺服系统控制原理,在Simulink中建立仿真模型,如图7所示。
3 动力学与伺服控制联合仿真
将在ADAMS软件中建立的无人化作战轻武器多体动力学模型与在Simulink中建立的伺服控制模型进行联合仿真。接口设计如下:在ADAMS软件中将高低和方向系统的驱动力矩、运动角度、运动角速度等定义为状态变量,作为多体动力学模型的输入输出,利用ADAMS中与Simulink的接口,生成仿真文件,供Simulink调用,实现机电联合仿真。在联合仿真的过程中,Simulink和ADAMS的分析步是相同的,实时观察仿真过程中机械结构部分在控制系统中的运动规律[11]。无人化作战轻武器机电联合仿真模型如图8所示。
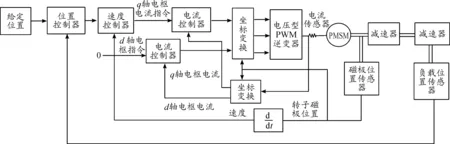
图6 基于矢量控制的伺服系统控制原理框图
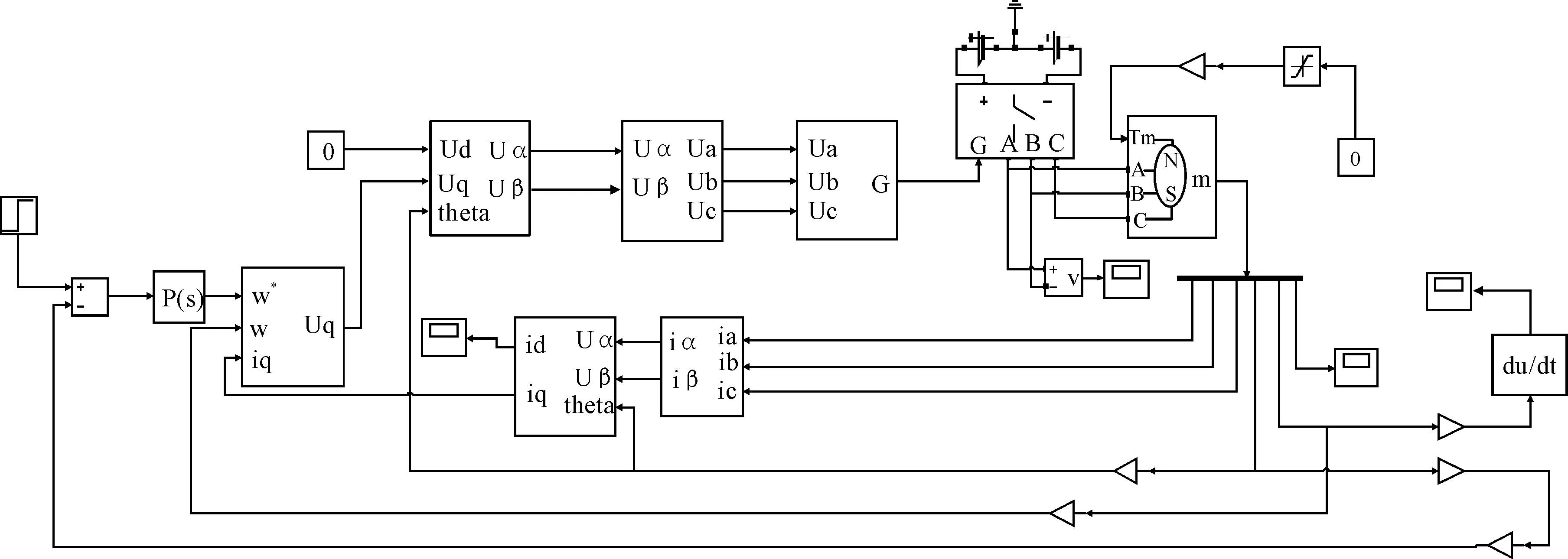
图7 基于矢量控制的伺服系统控制框图

图8 机电联合仿真模型框图
3.1 随动系统仿真结果分析
给位置伺服系统下达如下指令:高低转动0.34 rad,方向转动0.34 rad,设置仿真时间为2.5 s。可得到火力系统高低位子和方向位置的转角曲线等如图9和图10所示。
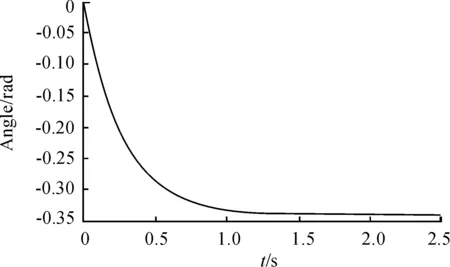
图9 枪高低位置转角曲线
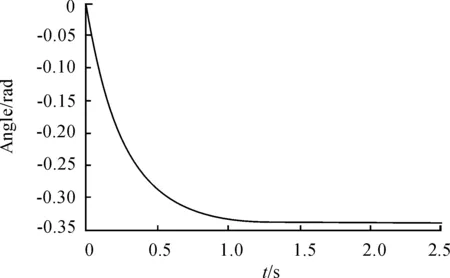
图10 枪方向位置转角曲线
根据仿真结果可知,轻型无人作战系统高低、方向系统在电机驱动力矩的驱动下,很快达到了指令规定的预定角度,符合选择的某轻型无人作战系统结构特性,仿真运动状态与理论值、实际值相符,联合仿真结果准确有效。
3.2 射击负载仿真
为了验证枪械射击时,枪后坐力对高低电机、方向电机的负载的影响,设计五连发工况,对高低电机和方向电机的负载影响如图11和图12所示。

图11 高低电机所受冲击力矩

图12 方向电机所受冲击力矩
高低电机所受冲击力矩峰值大约为55 N·m,高低电机受所冲击力矩普遍存在两个峰值,两次峰值分别由击发瞬间火药燃气对全枪产生的后坐力和机框后坐到位撞击产生的后坐力所导致。在后4次射击中,在两次波峰之间高低电机一直存在35 N·m左右的负载力矩,这是因为在后坐过程中压缩复进簧储能时,枪械尾端受到后坐力持续的作用所造成的。每次击发前高低电机都会受到一个与后坐力冲击相反的冲击,这是由于在枪机复进到位时的撞击而产生的。相比于高低电机所受大约为55 N·m的峰值力矩,方向电机所受不足0.005 N·m的峰值力矩可以忽略不计。不同枪械在射击过程中产生的沿枪管轴线方向的后坐力从几十公斤到上百公斤不等,产生左右两侧的偏转力很小,因此现有枪械在计算后坐力时仅考虑沿枪管轴线方向的力,左右两侧的力忽略不计,所以枪械后坐力对高低电机的负载影响较大,对方向电机的负载很小。因此,应在结构允许的情况下,尽量使高低电机位于枪机自动循环的运动行程中,且尽量与枪管轴线位于同一平面内,以减小枪械后坐力对电机产生的力矩,从而减小后坐力对高低电机的冲击。
3.3 轻型无人化作战系统的机电耦合分析
轻型无人作战系统是一个多学科耦合的系统[12],为探究机械系统的参数变化是否对控制系统产生影响,以某轻型无人作战系统的方向系统为例,将原有传动齿轮模数增加一倍,其他机械结构和控制系统保持不变。传动齿轮作为电机与架体之间的传动媒介,其结构参数的改变对机械系统和电机系统的影响较大,而且齿轮模数直接影响齿轮结构,因此选用传动齿轮的模数为变量具有较强代表性。仿真结果如图13所示。从中可以看出,将传动齿轮模数增加1倍,控制稳定性下降,机械系统与控制系统匹配性下降,因此可以判断机械系统的某些参数,将会对控制系统产生影响,无人作战系统的机械系统与控制系统存在相关性。在设计过程中,改变机械系统中的某一结构,可能将导致原有控制系统对全系统的控制效果,影响产品的性能。

图13 方向传动齿轮模数对控制性能的影响
4 结论
枪械后坐力对高低电机冲击负载较大,对方向电机冲击负载可忽略;机械系统的参数变化会对控制性能产生影响。机械系统与电气系统中部分设计参数之间相互影响,传统的机械系统与电气系统相互独立设计将会影响到产品的最终使用性能,因此无人化轻武器设计应当向着机电协同设计方向发展,将机电联合仿真技术引入到无人化轻武器系统中,对武器装备的研制具有一定的积极意义。
