综合多家实验室的原子时标发布系统设计
2020-04-11朱江淼王世镖赵伟博
朱江淼, 王 星, 高 源, 王世镖, 张 菁, 赵伟博
(1.北京工业大学信息学部,北京 100124; 2.中国计量科学研究院,北京 100029)
1 引 言
随着科技的飞速发展,高稳定度和高准确度的时间频率标准成为导航、定位、测量、天文和时间基准等方面不可或缺的关键技术。为此,世界各国都建立了各自的守时实验室。国际计量局(BIPM)整合了世界各守时实验室的钟差数据,计算并发布世界协调时UTC,因原子钟的台数直接影响着原子时标的稳定度,故UTC的稳定度很高,为各国守时实验室提供了时间基准。
中国计量科学研究院(NIM)守时实验室[1~3]、中国科学院国家授时中心(NTSC)守时实验室[4,5]都参与BIPM国际比对,但是国内仍有很多实验室没有参与国际比对,而国内也没有产生中国协调时UTC(CN)。联合我国国内的各守时实验室[6],充分利用我国原子钟资源,并生成中国协调时,有望将我国时间频率标准的稳定度提高到一个更高的水平。
2 系统总体设计
采用如表1所示的中国计量科学院与国内其他7家时间频率实验室的氢钟、铯钟数据(注:目前表中的前4家实验室提供了相关数据),设计了综合多家实验室的原子时标发布系统。

表1 参与原子时标研究项目的实验室Tab.1 Laboratory involved in atomic time-scale research projects
系统设计流程图如图1所示。
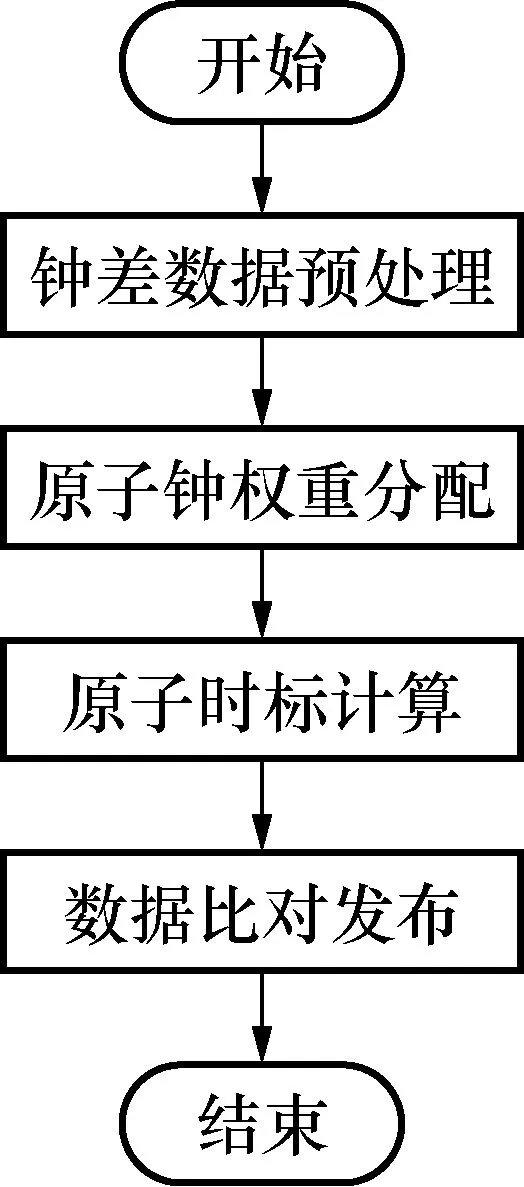
图1 系统设计流程图Fig.1 The flow chart of system design
3 钟差数据预处理
原子时标计算主要依靠原子钟的钟差数据,其原始数据格式并不完全一样,故需要先对原始钟差数据进行预处理,再对预处理后得到的频差数据进行粗大误差处理和缺失值处理。
3.1 数据格式的统一
钟差数据包括:各实验室的钟差数据(Clock数据)[7]和实验室间的GPS共视数据(GPSP3数据)[8]。主钟选取原则是采用稳定度好和准确度高的原子钟,采用NIM实验室的氢钟(1404832),在系统中主钟记作clock_PRI。
原子钟时差是指实验室原子钟(clock_i)与其原子时标(UTC(lab_i))之差:
clock_i-UTC(lab_i)
(1)
计算各原子钟与主钟的时差,具体方法如下:
(1) 主钟实验室(NIM)的本地原子钟与主钟的时差数据计算方法:
主钟实验室的本地原子钟与NIM原子时标之差:
clock_i-UTC(NIM)
(2)
主钟与NIM实验室原子时标之差:
clock_PRI-UTC(NIM)
(3)
式(2)~式(3),即为本地原子钟与主钟的时差:
clock_i-clock_PRI
(4)
(2) 非主钟实验室的异地原子钟与主钟的时差数据计算方法:
异地原子钟与主钟的钟差数据还需要通过GPSP3数据文件进行计算,先剔除不满足共视条件的数据,判断共视条件为:TRKL=780 s,ELV≥15°。依据GPSP3数据文件,该实验室的UTC与某一卫星钟(GPS_j)某时刻的时差:UTC(lab_a)-GPS_j,NIM实验室与某一卫星钟(GPS_j)某时刻的时差为:UTC(NIM)-GPS_j。
当天两个实验室的原子时标之差:

(5)
式中:j为1,2,3,…,n;n为2个实验室与同一卫星在同一时刻都有值的个数。从而得到异地原子钟与主钟的时差:
clock_i-clock_PRI=
(clock_i-UTC(lab_i)+(UTC(lab_i)-UTC(NIM))-
(clock_PRI-UTC(NIM))
(6)
钟差数据包括时差和频差两种形式,将时差数据转换为频差数据,即用原子钟与PRI钟相邻两天的时差数据之差除以时间间隔(86 400 s)。
3.2 粗差剔除与缺失值补偿
通常对钟差数据进行异常数据的监测与剔除和缺失数据的补偿,以减少噪声对钟差数据的影响。
基于氢钟频漂特性,将频差数据进行最小二乘线性拟合,其与拟合值的残差用莱特准则进行剔除。
由于数据本身缺失或者因剔除粗大误差值而使数据缺失,本系统使用常用的线性拟合来进行缺失值补偿。
4 原子钟权重分配
国际上用阿伦方差[9]表征原子钟的稳定度,当原子钟存在频漂时,阿伦方差不能很好表征其稳定度,故本文采用了哈德玛方差来表征原子钟的稳定度[10,11]。
4.1 哈德玛方差
哈德玛方差是三次采样方差,对频率漂移不敏感,适合分析具有频漂特性的氢钟稳定度。频差数据的哈德玛方差的定义为:
(7)

(8)
求解可得3台钟哈德玛方差,其他原子钟k,通过主钟,可求出其哈德玛方差:
(9)
4.2 动态权重分配
原子钟的稳定度与原子钟的哈德玛方差的关系为反比,故用哈德玛方差的倒数来表示原子钟的权重。权重w与哈德玛方差σ关系为:
(10)
为了避免某台钟稳定度太差,针对原子钟的哈德玛方差设定一个上限,以剔除特别差的钟。根据BIPM经验[12,13]与国内守时实验室原子钟性能,系统中设定哈德玛方差上限为7×10-14。为保证原子钟的权重之和为1,对其进行归一化处理:
(11)
另外,为避免非常稳定的钟对原子时标权重挟持,对权重的上限做一个限定:
(12)
式中:wmax表示上限权重,N是参与原子时标计算的钟数;A是经验值[14,15](依据BIPM,设置A=2.5)。对上限限制后的其余权重再次进行权重归一:
(13)
式中M为原子钟达到上限权重的个数。
5 原子时标计算
通过前文所述算法得到各原子钟与主钟之间的频差和权重,可得综合原子时标TA和主钟的频差:
(14)
联立UTC与UTC(NIM)的时差数据、主钟与NIM实验室的时差数据,可得UTC与未校准的综合原子时标的频差:
fUTC-fTA=(fUTC-fUTC(NIM))-(fclock_PRI-fUTC(NIM))-
(fTA-fclock_PRI)
(15)
将UTC与未校准时标的频差进行线性拟合,求出真实值与拟合值之间的差,即为UTC与校准后的综合原子时标的频差:
fUTC-fUTC(TA)
(16)
最后,将其频差转换成时差:
UTC-UTC(TA)=(fUTC-fUTC(TA))×86 400×109
(17)
6 数据比对发布
生成综合原子时标后,需要向国内各守时实验室发布时间公报,发布内容主要有如下3项:
(1) 钟差数据的发布:各个守时实验室的原始数据和处理后的钟差数据。
(2) 哈德玛方差与权重数据的发布:原子钟与主钟的哈德玛方差和原子钟的权重。
(3) 原子时标的发布:UTC-UTC(TA)、UTC-UTC(K)、TA-clock_i等数据。
7 系统构建与实现
本系统用MATLAB进行编写,根据原子时标的算法原理和时间公报发布的内容,对系统后台和界面进行设计与编程,系统总体算法按照前文所述,本系统的模块设计分为:原子钟数据模块,原子时标计算模块和原子时标发布模块。系统界面整体显示如图2所示。
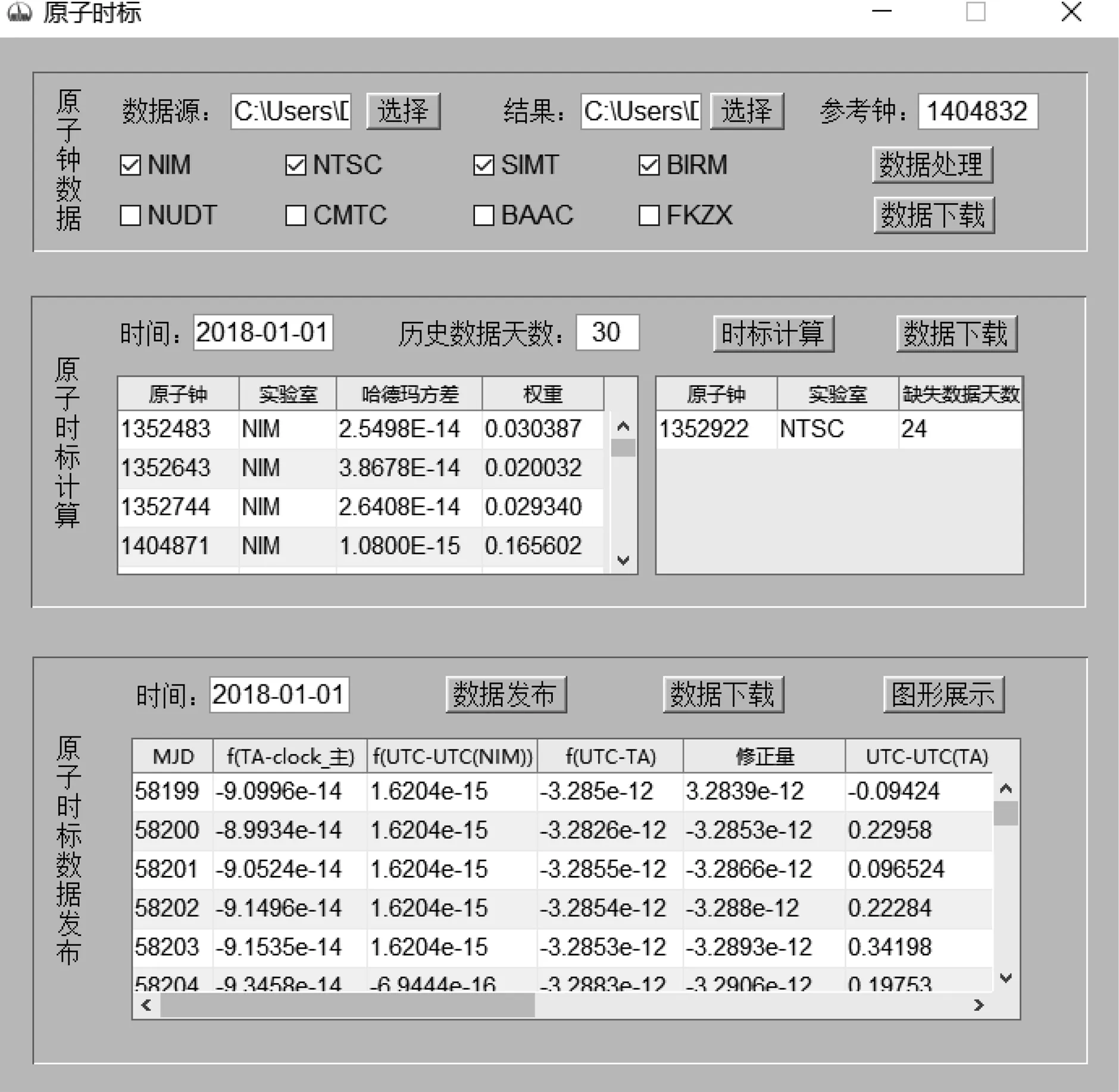
图2 原子时标系统Fig.2 Atomic time scale system
UTC与校准后的综合原子时标的折线图如图3所示,实际数据运行结果表明系统设计的综合原子时标与UTC的时间偏差明显优于±10 ns。

图3 UTC-UTC(TA)折线图Fig.3 Line chart of UTC-UTC(TA)
8 结 论
本文设计的综合多家实验室的原子时标发布系统,是首次综合国内各大守时实验室的钟差数据,实现了数据的统一格式处理,计算出综合后的校准原子时标,完成了国内时间公报的发布,这对国内正在研究的中国原子时标的方案构建与实施有很大的参考价值。
