基于虚拟现实的隧道交通设施与环境评估技术
2020-04-07张成龙刘乐园
何 坚,张成龙,张 凡,刘乐园
(1.北京工业大学信息学部,北京100124;2.北京市物联网软件与系统工程技术研究中心,北京100124)
截止2016年底,我国高速公路总里程达13.1万km,公路隧道15 181处,共计14 039.7km。其中,特长隧道815处,为3 622.7km;长隧道3 520处,为6 045.5km,共占公路隧道总里程的68.86%[1]。隧道作为高速公路交通的咽喉具有改善道路线形、缩短行车里程及保护环境等优点,但其纵深较长、空间相对狭小以及隧道内外光线亮度差别较大等特征容易导致交通事故,而隧道内发生交通事故后处理困难,极易造成群死群伤。国内外学者对公路交通事故的统计发现,隧道事故比例显著高于正常路段。对此,国内外研究人员纷纷研究提高驾驶员隧道行车效率和安全性的技术和方法。
荷兰应用科学研究组织认为隧道的特殊设计(如隧道的长度、类型、宽度、照明情况等)对驾驶员的行为以及主观安全感有很大程度的影响[2]。Geva等研究了公路隧道内车载信息系统的应用,认为在隧道中给驾驶员显示情报信息可减少隧道行驶中的心理不安和烦躁[3]。同济大学郭忠印等对隧道进出口的运行安全进行了研究,认为进出口线形过渡、照明过渡、路面抗滑性能过渡是影响隧道安全的主要因素[4]。基于上述研究成果,研究人员尝试在隧道中引入交通设施及景观技术为驾驶员营造和谐的驾驶环境。例如,张孟冬在隧道洞口引入景观设计,通过景观的颜色以及减速标志双重控速来提高隧道的安全性,实现隧道口的安全和景观功能有效结合[5]。玮宝等根据人眼暗适应曲线,在隧道入口接近段形成光过渡带的减光构件以有效缓解黑/白洞效应[6]。尽管我国在高速公路建设中越来越多引入新型交通设施和景观技术来改善隧道行车环境,但尚缺少隧道设施和景观的评估方法和技术。
欧美等发达国家较早开展公路设施评估技术和手段的研究。其中,美国于20世纪70年代开始研制基于GIS技术的城市景观规划模型METLAND(the Metropolitan Landscape Planning Model),并在自然景观资源管理、景观规划与评价等方面取得成功应用[7]。此外,欧美等发达国家针对隧道照明评估也开展了研究,国际照明委员会在2004年针对隧道入口段照明问题提出隧道的安全照明必须使驾驶员在入口前接近隧道时能察觉立在路面上的小目标物体,即该物体能被看见的距离应大于等于车辆以隧道设计限速行驶3s的距离[8]。世界道路协会、欧洲标准委员会等均采用亮度折减系数作为隧道入口段照明光源特性评价指标。我国也于2000年发布了公路隧道通风照明设计规范[9]。胡江碧等通过对24名驾驶员的实车驾驶开展数据分析,提出将瞳孔面积变化率作为评价隧道入口段景观照明条件安全舒适性的标准[10]。
综上所述,国内外现阶段主要针对高速公路设施与景观以及隧道出入口光照的评估与规范进行了研究,尚未针对隧道内的交通设施和环境设计评估开展研究。近年来我国发生了多起隧道特大交通事故,开展公路隧道交通设施与环境评估技术研究具有重要的理论研究意义和现实需要。由于隧道路段存在封闭、光线差等特征,难以开展实地测试,因此提出结合虚拟现实技术的隧道交通设施与环境评估技术。
1 公路隧道中车辆驾驶控制模型
隧道中行车需要驾驶员实时感知隧道内的驾驶环境,并依据车辆运行状态和环境信息实现对车辆的横向(方向盘操作,如车辆转弯、变更车道等)和纵向(刹车、油门操作,如加速、减速)控制。因此,分别从隧道内车辆的驾驶认知模型和车辆横纵向控制两方面建模描述车辆的驾驶控制。
1.1 基于ACT-R汽车驾驶认知模型
汽车驾驶是需要各项认知技能相互协调、共同决策的复杂任务,需要完备的认知理论支撑才能描述、预测驾驶员的复杂行为,进而分析导致驾驶外部结果(如转向、减速等)的内在原因,发现提高驾驶员操作效能、降低其认知负荷的方法[11]。理性思维的自适应控制系统模型(adaptive control of thoughtrational,ACT-R)是预测大脑工作机制和人类认知行为的认知理论模型,其已成功运用于人工智能、汽车驾驶等诸多领域[12],因此采用ACT-R模型对隧道环境下的驾驶认知行为建模。
ACT-R为组块和产生式组合进行表征的产生式系统。其工作过程中组块的回忆时间以及回忆错误率由激活度确定,而激活度取决于该组块在工作过程中的使用历史以及与其他组块的关联程度。每个行为动作由一个产生式进行描述,当且仅当认知体系结构中所有组块的当前状态满足产生式条件时,该产生式描述的行为动作才被执行。ACT-R模型的组成部分包括目标模块、陈述性知识(记忆)模块、中央处理模块、问题表征模块、感知模块(包括视觉和听觉2个感知模块)以及运动模块,每个模块都对应人类大脑中一个功能区,负责执行相应认知功能。ACT-R模型可用于特定领域的认知建模,建模时需在认知过程的核心模块基础上针对该领域的特征进行相关模块的补充。
参考文献[13]的基于ACT-R的驾驶行为模型。该模型将驾驶任务分为3个子任务,分别是控制、检测以及决策任务,模型通过这3个子任务来表征驾驶领域知识的产生式,通过增加预测眼动以及视觉注意转移模块,建立基于ACT-R的隧道汽车驾驶行为模型。在模型中控制任务包括感知信息和横纵向车辆控制,其中,视觉信息由车辆前方近点和远点进行采集;监测任务包括记录驾驶过程中周围环境及其变化;决策任务则包括根据驾驶环境进行判断,并作出相应的驾驶行为操作。同时模型还根据预设的概率随机检查车辆前方、后方、左侧车道以及右侧车道4个区域,当监测某区域时,视觉注意将落于该区域并判断是否存在车辆,若存在则在目标模块中存储车辆信息。
基于文献[13]中描述的驾驶行为模型,建立面向隧道场景的汽车驾驶认知模型,如图1所示。模型中,每项控制任务会由1条产生规则触发,执行结果送入操作缓冲,并通过操作实现控制任务。监测任务通过视觉模块持续感知驾驶环境信息,视觉缓冲把采集到的信息送到产生系统,并进行查询和知识匹配;若知识匹配失败则被丢弃,否则触发1条产生规则,同时将执行结果送入操作缓冲,并通过执行操作实现控制任务。决策任务利用监测数据查询得到匹配,结合目标模块进入目标缓冲,同时触发1条或多条产生规则,并将执行结果送入操作缓冲,进而通过执行操作模块完成决策下达的任务。
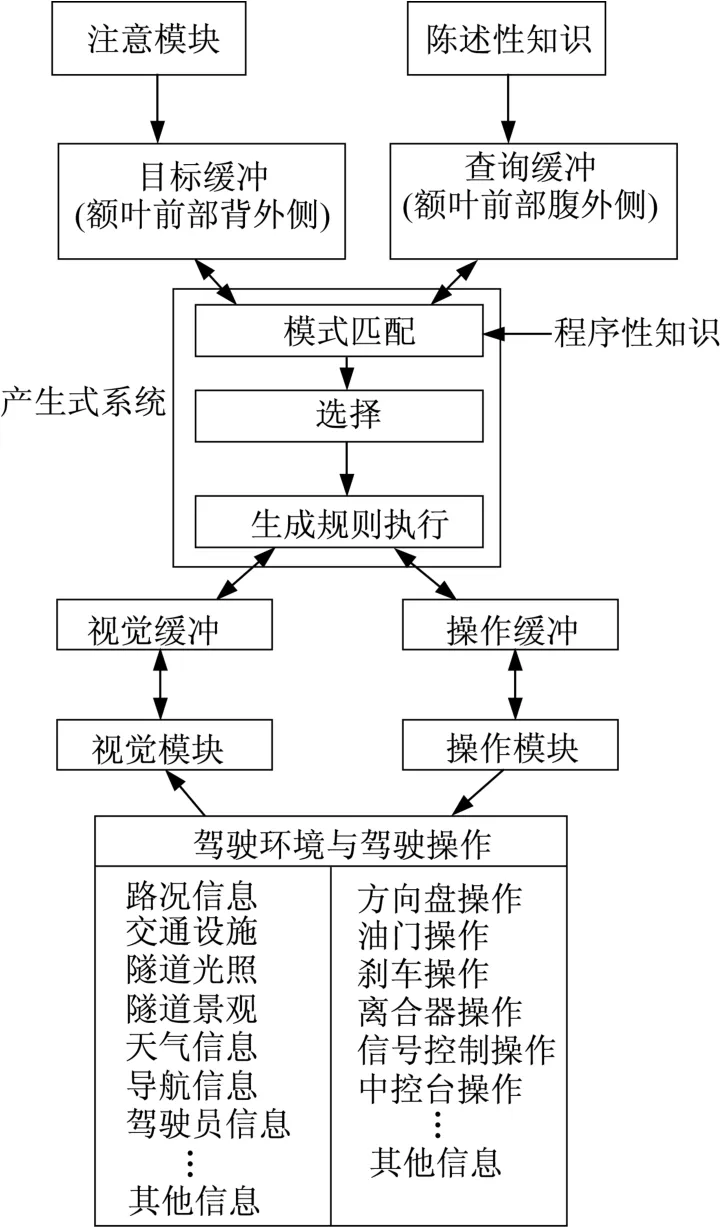
图1 隧道场景下基于ACT-R的驾驶行为模型Fig.1 Driving action model based on ACT-R in tunel
1.2 车辆行驶的操控建模
车辆在隧道行驶时,其行驶操控主要体现在横向和纵向两方面,因此对车辆的横纵向操作进行建模。研究证明驾驶中准确的横向控制需要从近点和远点2个视觉区域提取信息。其中,近点信息用于提供当前车辆横向位置的反馈,远点信息用于预测前方道路的弯度[14]。参考文献[13]中的模型将近点定义为车辆正前方8m处的道路中心。远点与远点时间参数far-time(默认值为2s)相关,并根据以下3种情况来取值。①路直且前方没有车辆时,远点为车辆行驶far-time时间后到达的道路中心点;②弯路且前方没有车辆时,远点为车辆行驶far-time时间后到达的弯路内切点;③前方有车辆且距离小于fartime时间行驶距离时,远点为前方车辆位置。基于上述原理,车辆横向转角变化值可依据式(1)计算。

其中,Δφ是在Δt时间(1个控制周期)内方向盘控制车辆横向转动的角度;θfar和θnear分别是远点和近点车辆正前方的夹角,Δθfar和Δθnear分别是在Δt时间内θfar和θnear变化的角度;θmax是保持车辆稳定的最大近点偏角,其默认值为约1/4的道宽;kfar、knear和kI为方程参数;min为最小值函数。
纵向控制(即速度控制)建模与横向控制建模类似。若所在车道车辆前方没有其他车辆,且其行驶速度小于隧道限速值,则驾驶员可踩油门加速在车道上行驶;若车速超过隧道限速值,驾驶员可踩刹车减速在车道上行驶;否则,车辆可在该车道上匀速或减速行驶。在Δt时间内本车加速度变化值可参考公式(2)来计算。

式中:Δtveh为前方车辆在Δt内加速度变化值;tveh为前车当前加速度值;tfollow为本车当前加数度值;kveh和kfollow为方程参数。Δψ为正值,表明车辆可加速行驶;为负值,表明车辆需减速行驶。
在车辆行驶过程中,驾驶员须将注意力集中于车辆周围环境和其他车辆位置。对此,模型采用预设概率随机查询车辆前后(从后视镜中)以及左右车道4个区域其中之一。模型在监测特定车道和方向时会将视觉转移到注意的那个区域,并判断是否有其他车辆出现。由于正常驾驶中驾驶员一般在右车道行驶而借用左车道实现超车,因此在隧道场景下是否变更车道的决定取决于驾驶员的目前车道。如果车辆是在右车道,模型检查此时路面前方的车辆情况,如果前面有车辆阻碍其进一步加速且左车道前后没车,驾驶员可转换车道并超车。如果车辆已在左车道,驾驶员将根据前面是否有车的情况做出保持或变更车道的决策。
2 隧道交通环境和设施建模
参考兴延高速上的营城子隧道设计高速公路隧道及相关交通设施和景观模型。隧道含有上行、下行2个洞口,并采用端墙式洞口,2个洞口之间种植树木和草皮。隧道限速80km·h-1,单车道交通量为937veh·h-1,隧道洞口前有限速80km·h-1长度为1km的高速公路。
2.1 隧道照明建模设计
在车辆行驶过程中,驾驶员80%以上的信息靠视觉获取。研究表明随着车速提高,驾驶员可清晰辨认物体的距离缩短,其动视力也随之降低[15]。行车过程中车速越快驾驶员的注意力越集中,注意力集中点将前移,对周围空间分辨能力降低,同时驾驶员的视野和视野所包围的角度也会随之减小,因此要根据不同车速下驾驶员注意力集中点及视野范围关系来设置高速隧道模型中交通设施、景观和光照等参数。
白天(尤其在晴天的情况下)驾驶员在进入隧道的瞬间,由于隧道内外亮度差异悬殊导致驾驶员的眼睛需经过一段适应时间才能看清隧道的内部情况;此外,驾驶员在驶出隧道的瞬间也需经过一段时间来适应洞内外明暗变化,即所谓的“黑洞”[16]和“白洞”[17]效应。在车速较快的情况下,“黑洞”及“白洞”效应极易导致驾驶员视觉功能的降低和反应时间的延迟,进而诱发交通事故。为了避免白天驾驶进出隧道中的“黑洞”、“白洞”效应,按照公路隧道照明规范(JTJ026.1—1999)将公路隧道的照明分为入口段、过渡段、中间段和出口段共4个照明段,分别设计隧道的光照模型,为驾驶员营造良好的隧道内工作视觉环境。
入口段照明Lth依据式(3)计算:

其中:k为折减系数;L20为隧道洞外亮度,cd·m-2。式中的k根据JTJ026.1—1999规范可知与设计交通量和行车速度相关,采用插值法对k计算并取值为0.031 5。L20与天空面积、车速、隧道洞口朝向相关,参考JTJ026.1—1999标准和《公路隧道照明设计细则》(JTG/T D70/2-01—2014)[18],设计隧道端墙式洞口的洞外亮度为3 000cd·m-2,削竹式洞口的洞外亮度为2 500cd·m-2。
隧道中入口段长度可按公式(4)计算:

式中:Dth是入口段长度,m;Ds是照明停车视距,m;h为洞口内尽空高度,m。根据相关标准Ds取值与限速及道路坡度相关。本文道路坡度为零,Ds取值为100m。
过渡段由TR1、TR2和TR3三个照明段组成,其长度与隧道行车限速相关。取Dtr1为72m,Dtr2为89m,Dtr3为133m。对应过渡段亮度与入口段亮度相关,具体计算方式如表1。

表1 过度段中不同照明段的亮度Tab.1 The luminance of each lighting section
中间段照明Lin与隧道设计交通量和车辆速度相关,依据《公路隧道照明设计细则》(JTG D70/2-01—2014)要求,隧道限速为80km·h-1时对应中间段亮度为2.5cd·m-2,同时LED灯具的中间段亮度指标还可以再折减50%,但考虑到太低的路面亮度可能影响到行车安全,所以基本段路面设计亮度按不低于2cd·m-2设计。
出口段长度默认为60m,其照明亮度为中间段亮度的5倍。
本隧道的基本照明选择40W LED灯两侧对称布置,间距10.0m,安装高度5.8m。隧道入口段、过渡段、出口段设置了相应的加强照明,分别采用180W、140W、80WLED灯进行照明。为预防突然停电引起隧道骤暗而影响行车安全,隧道全线设置了应急照明,设计从基本照明灯具中选择行车方向右侧的奇数灯作为应急照明光源,设计亮度为基本照明的1/4。
2.2 隧道内交通环境和设施建模
将隧道设施划分为基础设施、洞口设施和隧道内部设施3大类(如图2所示)。其中,基础设施包括隧道照明设施(如路测的路灯)、车道标线、减速标线、交通检测(如车辆检测器)与控制设施(如洞口信号灯)以及交通诱导设施。洞内设施包括:净空高度为2.5m具有双面电光显示的紧急电话标志;位于紧急停车带前5.0m、净空高度为2.5m双面显示的紧急停车带标志;位于行人横洞上方净空高度2.5m双面显示的行人横洞标志;位于行车方向左侧行车横洞、净空高度2.5m、双向显示的行车横洞标志;位于消防设施上方、净空高度为2.5m的消防设施标志(如火灾检测器、手动报警按钮、火灾报警控制器、灭火器、消火栓、固定式或泡沫灭火装置);位于隧道侧墙上净空高度1.3m单面显示的疏散指示标志,标志间距50m。隧道景观包括位于隧道两侧墙壁上的浮雕、反光环、洞内主动发光环、路面标记、蓄能发光道钉、洞内信息指示牌以及应急停车带等,如图3。
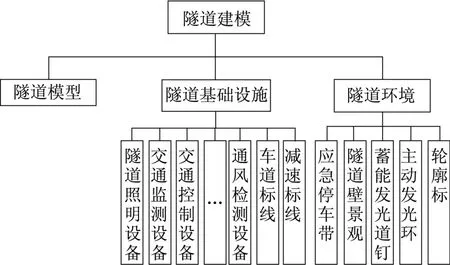
图2 隧道交通设施及景观模型结构Fig.2 The functional structure about the tunnel traffic facilities and landscape
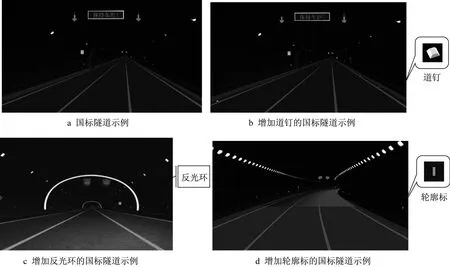
图3 隧道及部分交通设施景观、景观3D模型示例Fig.3 3D examples about the tunnel facilities and landscape
3 系统实验与结果分析
基于上述隧道车辆驾驶的认知操控模型及公路隧道交通设施和景观模型,结合虚拟现实技术和SCANeRTMstudio模拟驾驶平台搭建了仿真隧道驾驶环境。驾驶员通过真车改装的驾驶模拟舱在3D仿真高速隧道上行车。同时,眼动仪、模拟舱的OBD(on-board diagnostic)记录被试行车中的视觉认知反应及相关驾驶行为,为评估隧道交通设施及景观对驾驶行为的影响提供了分析数据。
3.1 实验环境
参考其他研究实验中被试挑选的原则[19],按男女比例3:1招募了30名被试。其中男性被试23名,女性被试7名。被试身体健康、驾驶技术熟练,并具有高速公路驾驶经验。模拟驾驶实验中所用软件为SCANeRTMstudio模拟驾驶平台,其提供C++和C#的动态链接库结构,使用C语言进行编写除实现模拟驾驶的多种额外功能,同时仿真隧道建模使用了3DMAX软件进行建模;实验中所用硬件仪器设备包括:驾驶模拟舱(由丰田汽车改装)、服务器主机、音箱(模拟车辆行驶过程中的环境声音),4个投影仪(用于驾驶员前后方及左右两侧动态驾驶环境的仿真),3块9英寸显示屏(用于仿真模拟舱两侧反光镜及后视镜)构成。模拟舱的OBD记录了被试驾驶过程中的行为数据,包括驾驶过程中的车辆速度均值、加速度均值、速度标准差、加速度标准差等。SMI眼动仪记录了被试驾驶过程的注视点(持续注视时间、注视点位置)、眼动轨迹(驾驶员眼动空间范围)、瞳孔面积及其变化率等。
图4所示为实验所用高速隧道线路。该线路上包含了4种隧道方案:方案1为仅含隧道基础设施的国标方案,方案2为国标方案上增加道钉交通设施,方案3为国标方案上增加反光环景观,方案4为国标方案上增加轮廓标交通设施。将4种隧道方案分别放到测试线路中,不同隧道方案之间通过高速公路连接段进行连接。连接段和隧道的限速分别为120km·h-1和80km·h-1。实验线路上的模拟道路均为平路,不包含任何上坡或下坡路段。实验因变量为不同景观设施对驾驶员的注意力和驾驶行为的影响。测试开始前,邀请被试进入模拟舱进行5min试驾,以适应模拟驾驶舱和测试场景。试驾结束后调取场景,并告知被试目的地,最后被试通过模拟舱完成约30min的高速隧道仿真驾驶实验。
实验中的交通设施景观包括隧道洞口外侧道路景观、隧道端墙、隧道照明、隧道内消防设施、隧道内应急设施(紧急电话、疏散标志)、隧道内应急停车带、隧道内行人及行车横洞等。具体设计部分如图2所示。
3.2 实验结果分析
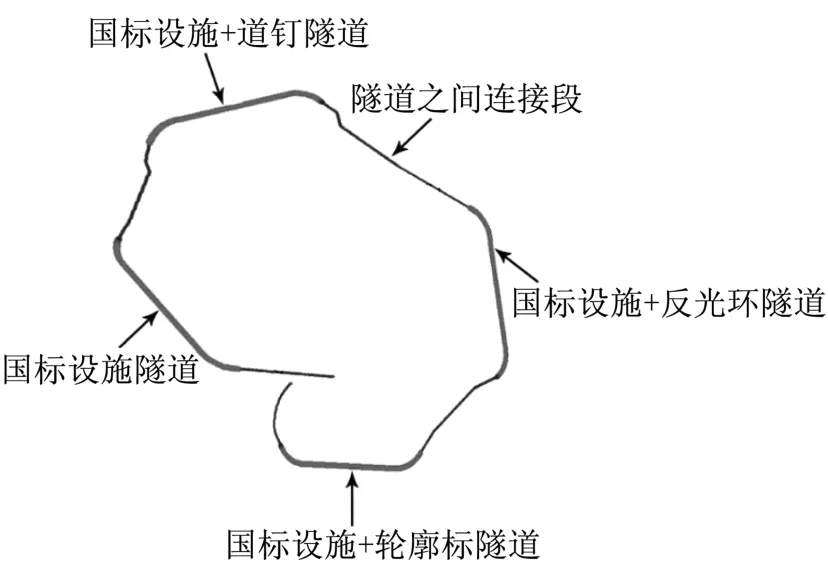
图4 隧道线形Fig.4 Tunnel alignment
针对模拟舱OBD采集的被试驾驶行为数据(包括仿真高速隧道驾驶中的平均车速、加速度、速度标准差、加速度标准差、油门功效),将控速系数作为评价指标,提取KMO(Kaiser-Meyer-Olkin)检验值,并结合Bartlett球形度检验进行主成因分析。此外,应用SPSS软件提取了3个公因子(这3个公因子的累计方差贡献度为84.25%),3个公因子的得分函数如下:
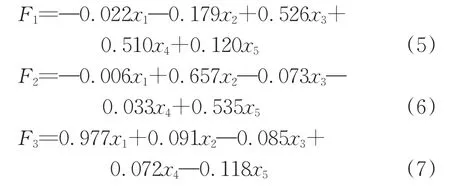
基于上述3个公因子,控速系数可通过式(8)计算得出。

式(5)~(8)中的常量系数通过SPSS统计分析得出。参考式(8),对4种隧道方案的控速系数进行了计算。方案3的控速系数最低,为—0.154 66,方案2的控速系数为—0.152 13,方案4的控速系数为0.221 135,方案1的控速系数为0.272 473。由于控速系数值越小越好,因此可知含白色反光环的方案3的控速效果最好。
图5为4种隧道方案的加速度统计分析图。从图5可知在隧道入口(0m)处加速度变化最为明显。其中,方案3的分段加速度相比最为稳定,即被试可以平稳行驶通过隧道入口,不必因为隧道入口的黑洞效应减速。另外,图5说明在隧道弯道处部署反光环和道钉后加速度变化相比国标方案更平稳,安全性也更高。
为了对比在相同景观设施情况下不同间距对驾驶行为的影响,针对反光环设置了间距分别为200m和300m的对照组。图6所示为2个对照组与国标方案的加速度标准差数据对比图。图6说明间距为200m的反光环方案相比间距为300m的方案具有更高的驾驶稳定性。同时,两者相较于国标方案驾驶稳定性都有显著提升。
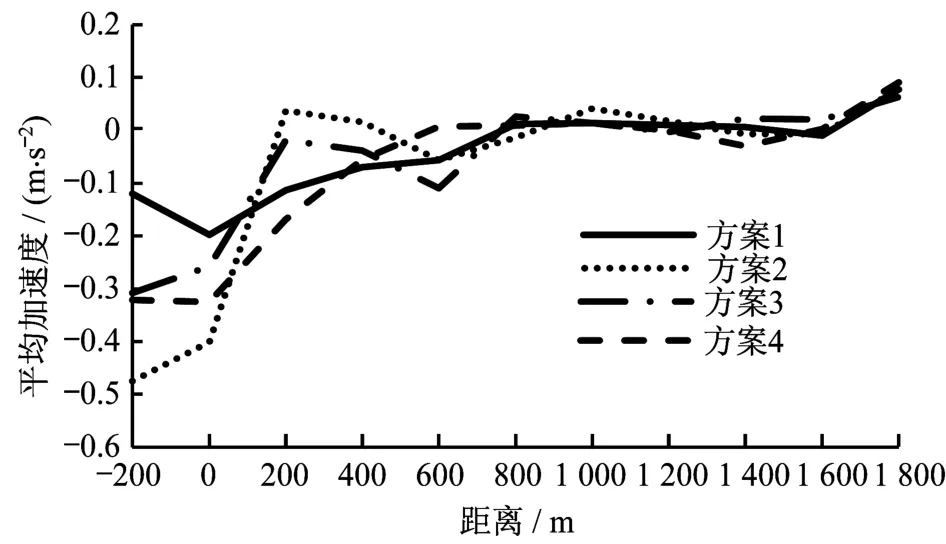
图5 各景观设施分段加速度Fig.5 Acceleration line diagram under different tunnel facilities and landscape

图6 不同间距反光环分段加速度标准差Fig.6 Acceleration standard deviation for tunnel reflectors with different spacing interval
除反光环外,也为轮廓标和道钉分别设置对照组,轮廓标设置间距为15m和50m的对照组,道钉设置间距为6m和15m的对照组。结果显示15m轮廓标方案相比间距为50m的方案具有更高驾驶稳定性。6m间距道钉相较15m间距的道钉设施方案具有更高驾驶稳定性。同时,这4个对照组方案相较国标方案驾驶稳定性均有显著提升。
在驾驶过程中,驾驶员所得到的外界信息80%需要通过视觉来获取,并依据视觉信息做出相应驾驶决策。此外,瞳孔变化与光线强弱以及物体距离远近有关之外,还与知觉、记忆、思维、动机、情绪等诸多高级心理活动相联系,瞳孔的放大往往意味着人类认知活动中心存在较大的心理负荷。对此,对驾驶过程中眼动仪获取的被试瞳孔面积数据进行了统计分析。以80km·h-1的速度驶入隧道洞口瞬间,不同隧道场景下被试在驶入隧道洞口瞬间的瞳孔面积变化率如表2所示。
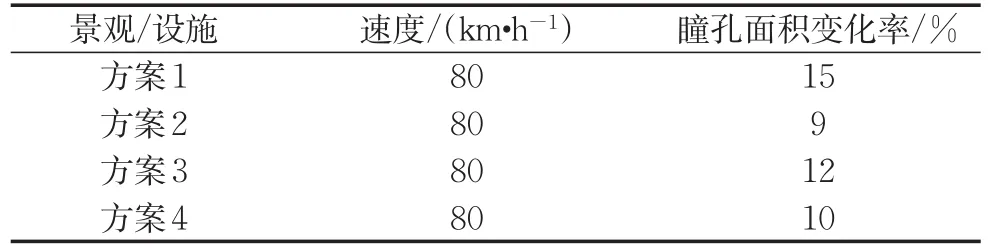
表2 不同方案下的瞳孔面积变化率Tab.2 Pupil area change rate
从表2可以看到方案2的隧道入口瞳孔面积变化率最小(9%);方案3瞳孔面积变化率略大(为12%),这是因为反光环的放置位置相较其他方案距离隧道洞口更远,驾驶员在进入隧道洞口时反光环的影响相对较小,导致瞳孔面积变化率略大。另外,4种设计方案的被试瞳孔面积在隧道中段驾驶时变化相对比较稳定。这是因为隧道中段隧道光照环境相对稳定,驾驶员视觉适应了隧道的光照环境,导致紧张感逐渐减弱,同时瞳孔面积变化趋于稳定。总体而言,道钉、轮廓标、反光环3种隧道方案都明显提高了驾驶员驾驶视野,有效减弱了被试的压抑感,让被试的精神状态相对更放松。
此外,针对被试的原始瞳孔面积变化数据进行了卡尔曼滤波处理,去除掉无规则噪点,进而分析判断被试在2个反光环之间的瞳孔面积变化原因。图7为卡尔曼滤波处理后方案3与方案1的被试瞳孔面积变化对比图。图中,框中所示区域为经过反光环时瞳孔面积变化。从图7可以发现当驾驶员在行经反光环时,驾驶员瞳孔面积会逐渐减小,通过反光环之后驾驶员瞳孔面积会增大。表明反光环在隧道内驾驶过程中可以有效刺激被试的视觉反应,使被试注意力保持较高集中度,确保行车稳定安全。
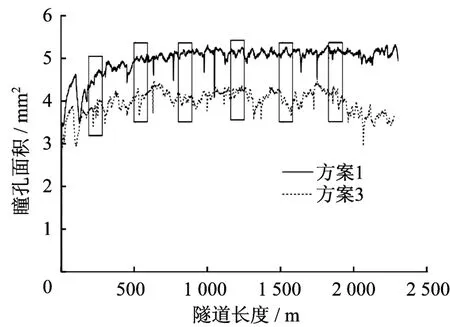
图7 方案3与方案1瞳孔面积变化对比Fig.7 The comparison on the changes between programme 1 and programme 3
通过对被试在4种隧道方案的模拟驾驶中的行为数据、眼动数据分析,可以得出结论:反光环景观、道钉、轮廓标等交通设施可以有效降低被试在高速公路隧道驾驶过程中紧张感,使驾驶员平稳地在隧道中行车,降低驾驶危险。其中,反光环的实验效果最明显,对被试的安全驾驶行为影响最大。由于使用反光环不需要消耗电力能源,稳定性也更好,符合绿色隧道的设计理念。
4 结论
结合虚拟现实和驾驶行为建模技术建立隧道仿真驾驶测试环境,并实验验证了隧道内交通设施和景观对驾驶行为的积极影响。其中,在添加间距为6m的道钉之后,隧道入口的分段加速度值相对比较稳定,有助于减弱隧道入口的黑洞效应,防止黑洞效应导致的驾驶员在隧道入口减速及由其导致的交通隐患。在隧道的中间段,添加交通设施(如道钉,轮廓标)和景观(如反光环)方案相较国标方案可以提升驾驶员关注度和驾驶稳定性,使其可更加流畅地在隧道中行车。其次,200m反光环和300m反光环的对比试验表明,200m反光环可以使驾驶员注意力更加集中。反光环实验结果与文献[20]中的结果相比较,结论较为一致。同时,文献[20]说明瞳孔面积反应了驾驶人员的注意点和注意力集中程度,上述因素表明200m反光环能在隧道中有效提高驾驶人员的行车安全。
提出的基于虚拟现实的高速公路隧道交通设施和景观评估技术是一种低风险的有效评估方法,可为设计安全、高效、节能的隧道交通设施和景观方案提供有效验证,并为方案设计提供决策依据。
