基于运动生物力学捕捉技术的体育虚拟训练仿真评估
2020-03-30曹中旺黄春香余容平
曹中旺 黄春香 余容平
(1福建船政交通职业学院 福建福州 350007;2武夷学院 福建南平 354300;3福建商学院 福建福州 350012)
视觉仿真技术是一种基于计算信息的沉浸式交互环境的技术。它采用计算机图形技术,根据仿真的目的,构建仿真对象的3D模型并再现真实环境,达到逼真的仿真结果[1-2]。仿真技术有助于缩短测试和开发周期,提高测试和研究的质量,节省实验和研究资金,并已在许多领域得到广泛应用[3-4]。竞技体育领域,如跳水、体操、蹦床、举重、篮球、滑雪、高尔夫等,特别是在跳水项目中,蹦床项目取得了巨大的成功,具有非常明显的经济效益,成为重要的高科技运动手段实地培训[5]。运动生物力学是生物力学的一个分支,它利用力学原理和方法来研究人体的机械运动理论,它与测量技术,数学建模技术和计算机技术一起发展,因此,运动生物力学将在生物力学中起到很大的作用[6]。随着人体链接参数测量技术和生物力学计算机仿真技术的改进,对生物力学的研究提高了运动生物力学的水平[7-8]。该学科还通过体育实践中的人事实践,促进了体育教练、运动员、体育教师和体育科研人员的发展,可以为体育事业的发展提供更好的前景[9-10]。视觉技术在运动员模拟训练中的应用,可以对动作进行分析和评价,并进行创新,提高运动训练的技术含量,使运动员迅速掌握动作技术,保持良好的竞技状态。
文章依托运动生物力学捕捉技术,通过使用数学软件对模型数据进行仿真,然后建立多元线性模型,探讨各种因素对性能的影响程度,并验证动态模型的合理性,为理论提供支撑。
1 视觉模拟系统概述
视觉仿真系统主要用于完成机器,电路板及其相关信息的显示,卡仿真电路以及板载部件的工作显示等。为方便用户操作软件和观察仿真场景,系统应提供友好的图形用户界面。另外,在虚拟无线电台仿真系统中,电路仿真系统是为视觉仿真系统服务的,它是视觉仿真系统的基础,而视觉仿真系统是其应用和显示。故障库和可视化仿真系统是整个车站仿真系统的两个并行子系统,通过它们之间的程序接口交互作用,可以完成后期工作中的系统故障诊断。从功能结构上看,视觉仿真系统由管理模块,初始化模块,实体渲染模块,数据接口模块,特效处理模块和视听显示模块组成。
1.1 管理模块
作为视觉仿真系统中最重要的模块,其基本功能是实现对过程控制的仿真,通过接收系统接收消息,用户输入的交互根据预定的规则与策略之间的协调进行。各种功能操作模块。
1.2 初始化模块
它是可视化仿真系统的主要功能初始化模块,可以根据用户的配置对仿真数据文件系统进行初始化过程和配置文件。
1.3 数据接口模块
它主要用于读取和后续处理仿真数据文件,然后基于这些数据进行视觉系统的运行过程,该模块在管理模块的控制下,同时将数据提供给系统的实体渲染模块以及特效处理模块
1.4 实体渲染模块
它主要负责各种实体的3D绘图,用于可视化显示工作,是具有用户界面的可视化仿真系统,用于可通过可视化方式显示系统的各种数据。该模块的接收管理模块工作,同时从数据接口模块实时渲染实体需要的各种数据。该模块的实现由各种绘图算法组成。
1.5 特效处理模块
它负责表现整个视觉模拟系统的特效,视觉模拟系统是逼真的关键模块。
1.6 视听显示模块
它主要是指音响系统和投影显示系统等硬件设备。
2 基于运动生物力学的体育虚拟训练仿真
现代体育运动正变得越来越高,越来越困难,越来越精确。它借助现代技术使培训更加深入。为了最大限度地挖掘人们的潜力,现代体育需要不断地参与科学和技术。这将需要综合利用与体育科学相关的学科知识,并通过使用系统科学的方法来研究体育的内在规律。运动系统仿真是一门实验技术科学,它是通过计算机仿真技术代表运动老师的教学经验,教练意图的训练,管理者的组织方案和运动员的训练过程,从而实现对运动的解释。实验科学技术的系统,分析、预测、组织和评估。
从运动生物力学角度来看,起跳、起飞和横杆的三个部分构成了背式跳高过程的主要动作,横杆的初始参数由起跳和起飞提供,然后相应的车身摆动将有助于运动员越过杠铃,其目的是通过合理的动作和合理的位置来达到最高的跳高。首先依据运动生物生物力学捕捉技术,分析了起步、起飞和横杆,并建立了动力学模型进行数据仿真。
由于在跳起弗斯伯里式跳高过程中运动员的身体旋转,主要集中在头部、四肢和躯干上,因此在本节中,人体的结构被视为可以分为头部、上肢、上躯干、下躯干、大腿、前肢、上臂和前臂,用Ix表示的额轴圆形的七个转动惯量中的每一个,Iy是围绕矢状轴的转动惯量,Iz是围绕垂直轴的惯性矩。通过使用“平行轴定理”将重量收集到质心中并与前臂和前腿一起进行计算,可以获得手和脚的惯性矩。根据二元回归方程惯性矩上的身高和体重的经验数据,可以得到各连杆的惯性矩。回归方程如公式(1)所示:

式(1)中,Ii为绕线轴三轴的转动惯量,X1,X2分别为人体重量(kg)和身高(CM),δ2为回归方程的方差。
平行轴定理:如果有平行于穿过质心的轴的任何轴,并且这两个轴的距离为d,则I是刚体产生的惯性矩,如公式(2)所示:
式(2)中,I′为轴的惯性矩,它是相对于质心m穿过的轴相对于质心质量的轴。助跑阶段的运动学分析和模型建立
图1是运动员在虚拟训练助跑过程中的身体运动状况。

图1 助跑过程中人体运动的简笔画模型
跑步的运动学特征体现在步长、频率上,其运动关系如公式(3)所示。

在式(3)中,L代表步长,T代表步长,f代表频率,v是相应步长的平均速度。如果可以通过测量步长和步长时间来计算相应步的平均速度,则因为在加速过程中运动员的速度非常快(瞬时速度),因此,跑步中重心的水平速度 向上运动被视为一系列匀速运动。一般高水平运动员的平均步调间隔时间为0.216s,支撑时间平均约为40.7%,飞行阶段的时间平均为59.3%。
助跑的第二阶段目的是使运动员在起飞前获得适合速度的力量和技术。在弯道跑步中,支撑腿支撑膝盖弯曲,最终支撑步骤的膝盖关节角度约为120°。运动员的曲线加速实际上是身体重心的圆周运动。当物体进行圆周运动时,它需要其他方面来提供向心力,即如公式(4)所示:

在公式(4)中,N‖+fμ代表向心力ÿfμ代表人体在地面上的摩擦力,当摩擦力固定时,增加的上升速度应减小ψ度,这意味着上升速度越高,身体的倾斜度越大。
2.1 起飞阶段训练仿真
起飞的最后一步中,起飞速度为最大速度:vmax,右侧为起飞过程,身体重心通过支撑小腿伸展而向上运动,起飞过程中支撑腿的应力分析如图2所示。

图2 支撑腿的应力分析
图2 显示,腿承受重力,来自地面的力和腿上的物理压力-蹲和拉伸过程中角度α(t)的变化范围为(t)和φ(t)相对较小。由地面在腿上传导的力可分解为垂直力Fy(t)和水平力Fx(t),这两个分量的作用是增加减小水平速度和增大垂直速度,可得动量公式(5):

在式(5)中,ΔVx,ΔVy代表蹲坐和伸展过程中两个方向的变化Δt是地面在腿上的支撑时间。根据水平和垂直方向上受力平台的情况,可以理解地面对支撑腿的影响,如图3所示。

图3 受力平台在水平和垂直方向上的应力状态
根据图3可知,垂直方向的速度不断增加,而水平方向的速度不断减小,这反映了起飞动作的实质是使合理的水平速度损失和垂直向上的速度尽可能地增加。
2.2 交叉杆阶段训练仿真
起飞结束后,人体离开地面并开始从其背部横过横杆,图4显示的虚拟仿真幻影是人体横越横杆的阶段。

图4 交叉杆阶段
图4收集了8个横杆阶段状态的力矩,运动员在空中绕垂直轴的运动符合公式(6):
在式(6)中,M(t)是人体绕垂直轴传递的扭矩ÿ该扭矩随手臂的摆动而变化,直到人体的摆动角度γ(t)达到180°,人体的两侧为对称时,采用均质圆盘公式来计算绕垂直轴的惯性矩。
交叉杆时运动员的手臂摆动不仅是人体的相对旋转,还可以提高人体的机械动能,假设人体的质量占人体总质量的11.28%,当起飞结束时身体重心的向上瞬时速度为Vy0,手臂向上摆动的质心速度为时,则身体在手臂向上过程中比跳跃结束时处理更多的能量。手臂的动能增量表达式如公式(7)所示:

根据式(7),人体动能增加为111.28%,也就是说,如果手臂不摆动,如果运动员计划通过摆动获得更多的动能,则总能量将减少11.28%。手臂、动能和动量之间的转换关系可以采用或分析。当人体垂直向上的动量增加时,其动能会相应增加,在人体悬吊过程中,人体仅受重力影响,整个系统在一定程度上通过对内部的消化而处于动量守恒中,身体的整体动量可以得到改善,只要延长加速过程就可以使增长的动量发生变化,因此手臂挥杆的延伸可以帮助提高跳高的性能。
3.3 模型模拟
模型仿真的目的是获得运动员在交叉杆阶段的运动轨迹,重心的运动过程类似于抛物线运动,建立运动方程需要确定初始参数,以某运动员为例进行数学模拟,其数学轨迹仿真图像如图5所示。
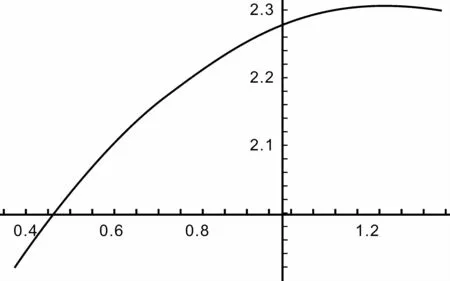
图5 人体重心运动轨迹的仿真图
如图5所示,该重心的轨迹图像,与某运动员的实际坡度2.35 2.39 m相符,因此动力学模型可以通过运动生物力学分析来恢复运动。
3.4 数据分析
本节主要探讨跳高结果与初始跳动速度l之间的数据关系。经过虚拟训练仿真模拟,统计出相应的调高数据结果,绘制相应的折线图,分析跳高得分的有关因素,其结果如图6所示。在图6中,左上方的图片与合成的速度和跳跃分数有关,右上方是水平速度和跳跃分数的图像,左下方是垂直速度和分数的图像,右下方是速度和得分的平方。从四个图像可以看出跳跃速度和得分之间的相关性不是很紧密,公式(8)是跳跃得分和四种速度的四个四元线性回归方程:


图6 分数和速度的变化趋势
在公式(8)中,H代表跳跃得分,v代表跳跃的合成速度,v‖,v⊥分别代表水平速度和垂直速度,H与合成速度v正相关,合成速度v处理最大的灵敏度,此外垂直速度还影响跳跃得分。
统计参数的结果主要包括:①残差平方和=0.0645;偏差平方和=0.1058;②多重相关系数=0.6252;方差=0.1795。
根据统计参数,多元线性回归的拟合优度良好,这表明合成速度和垂直速度对跳跃得分的影响很大。
4 结论
从运动生物力学角度老说,可以将人体看作是一个多刚体模型,通过研究刚体运动情况,可以反映出人体的实际运动。在起飞过程中,躯干的完全伸展可以提高垂直速度,并在跳跃后同时增加人的冲动效果,从而增加身体越过身体轴线的惯性矩。
文章依托运动生物力学捕捉技术,通过动力学模型对某运动员进行了虚拟训练轨迹仿真,验证了生物运动力学对该运动进行指导的合理性。通过数据分析和线性回归方程的建立,可以得出以下结论:跳跃速度和垂直速度对跳跃得分的影响很大,也证明了跳跃角度的重要性。