刮板输送机功率平衡控制方案研究
2020-03-30呼成林
呼成林
(山西潞安集团 李村煤矿, 山西 长治 046600)
刮板输送机主要承担煤矿井下运煤任务,随着综采工作面产量的不断提高,刮板输送机的功率、运输距离以及运煤量不断增加,同时对其运行的稳定性要求也逐步提高。刮板输送机运行时,其负载变化随机性较大,重载启动、重载运行情况较普遍,极易发生机头、机尾电动机电流过大、功率不平衡问题,损坏电动机,还可能发生链条断裂等重大事故[1]. 因此,研究并保证刮板输送机机头、机尾电动机功率平衡可有效提高刮板输送机运行稳定,减少故障发生率。国外学者对刮板输送机功率平衡问题研究较早,如早在1993年,Sikora.W研究并分析刮板输送机负载均衡问题,并给出保证刮板输送机功率平衡的驱动装置。国内对刮板输送机功率平衡问题研究起步较晚,并主要研究刮板输送机启动过程功率平衡问题,如有学者基于参数预算、模糊控制理论,预测电动机输出电流实现功率平衡控制;或设计基于模糊神经网络的刮板输送机功率平衡控制器[2-4]. 上述研究主要集中在电动机启动过程中的功率平衡问题,对刮板输送机稳定运行时的功率平衡问题研究较少。本文采用电流识别负载加变频调速方案,研究并设计刮板输送机稳定运行时的功率平衡方案。
1 功率平衡系统结构
刮板输送机功率平衡控制系统结构见图1,机头由两台电动机加一台变频器组成,由变频器驱动两台电动机运行并实现调速功能,实现“一拖二”的驱动模式。机尾电机由一台电动机加一台变频器组成,该变频器直接驱动机尾电机运行并实现调速功能,实现“一拖一”的驱动模式。刮板输送机机头和机尾变频器是实现功率平衡控制的硬件系统,变频器将获取的电动机的运行参数以CanOpen通信方式发送给PLC控制器,如输出电流、状态字、直流母线电压、错误代码等;PLC控制器将控制命令以CanOpen通信方式发送给变频器,如控制字、运行模式等。
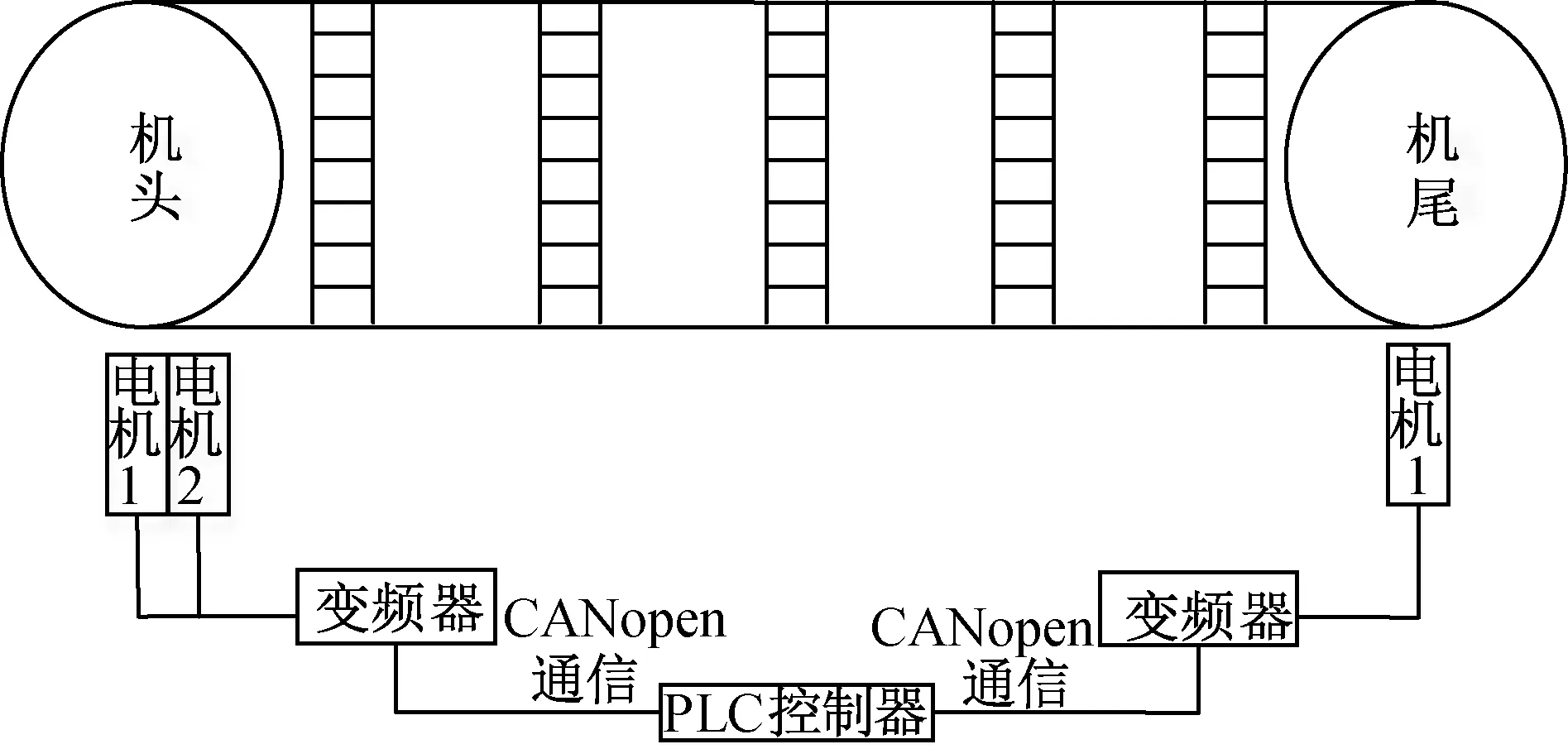
图1 刮板输送机功率平衡控制系统结构图
根据电动机功率与电流的关系可知,研究刮板输送机功率平衡,即研究电动机输出电流平衡。当刮板输送机机头或机尾负载变化时,PLC控制器根据当前刮板输送机运行状态,控制变频器对所驱动的电动机进行转速调节,使得机头、机尾电动机的转矩差在预设范围之内,避免机头、机尾电机欠载或过载,从而实现刮板输送机机头、机尾电动机的功率平衡控制。
2 功率平衡控制原理
2.1 功率平衡控制思路
依据刮板输送机工作原理以及刮板输送机控制系统结构,做如下假设:1) 将机头的电动机1以及电动机2等效为机头电动机,将机尾电动机1等效为机尾电动机。2) 机头、机尾电动机的机械特性相同。3) 机头、机尾负载变化由机头电流i1以及机尾电流i2识别。
刮板输送机功率平衡控制思路见图2,当i1/i2=1时,表明该时刻刮板输送机机头机尾电动机功率平衡;当i1/i2≠1时,表明该时刻刮板输送机机头机尾电动机功率不平衡。令Δi=i1-i2,当Δi>0时,即i1>i2,机头电动机电流大于机尾电动机电流,机头电动机出现过载,其输出功率大于机尾电动机输出功率,此时应提高机尾电动机转速,以分担机头电动机的负载;当Δi<0时,即i1 图2 刮板输送机功率平衡控制思路图 根据假设,刮板输送机各电动机的机械特性相同,机头电动机1以及电动机2始终保持同步,即可将该两个电动机等效。已知三相异步电动机机械特性为[6-7]: (1) 刮板输送机机头电机的等效机械特性为: (2) 采用恒功率控制方式,即保持机头、机尾电动机总功率不变,根据负载变化,改变机头、机尾电动机的转速,进而调节电动机的输出转矩,实现3台电动机的功率平衡控制。3台电动机的额定功率为: Pei=Teiωei (3) 其中,Pei为3台电动机的额定功率,kW;Tei为各电动机的额定输出转矩,N·m;ωei为各电动机的额定转速,rad/s. 因3台电动机的额定功率相同,机械特性相同,则机头电动机1、电动机2以及机尾电动机1的额定功率分配比为1∶1∶1,机头、机尾功率分配比为2∶1. 根据功率平衡控制思路、等效电动机机械特性分析以及电动机功率配比方案设计刮板输送机功率平衡控制系统,见图3,电流i1以及i2分别为机头等效电动机电流以及机尾电动机电流,该电流值可反映机头、机尾电动机的负载转矩,可根据机头、机尾电动机实时负载转矩比与额定值转矩比的差值来调节机头、机尾电动机的转速,达到其功率比在预设范围之内的目的。图3中,Δi=i1-i2,如果Δi在时间tmax内持续大于0,且Δi>i2·5%,则表明此时刮板输送机机头电动机过载,应提高机尾电动机转速,使得机尾电动机分担机头负载,达到机头、机尾电动机功率平衡;如果Δi在时间tmax内持续小于0,且Δi>i2·5%,则表明此时刮板输送机机尾电动机过载,应提高机头电动机转速。Δi=0时,表明此时机头、机尾电动机功率处于正常范围,无过载现象发生。磁链调节器以及转矩调节器即给定值与实际反馈进行比较,并经调节器输出,采用施密特调节方法进行调节,以保证定子磁链幅值与观测值的差值在精度控制范围之内。转矩观测器和磁链观测器采用U-N模型,可实现全速度范围的定子磁链观测,受负载影响较小,控制性能好,精确度较高。开关状态选择单元实质是选择电压空间矢量开关信号,依据磁链、转矩调节器信号来确定电压空间矢量,并形成开关脉冲信号,控制PWM逆变器。 图3 刮板输送机功率平衡控制系统结构图 刮板输送机机头、机尾电动机功率平衡控制系统的设计,可有效缓解机头、机尾电动机运行不协调、系统抖动大,严重时发生链条断链的严重事故,保证刮板运输机运行的稳定性和安全性,同时可提高刮板输送机工作效率,延长电动机使用寿命。在后续的研究中,可运用模糊控制、神经网络以及机器学习等技术预测机头、机尾电动机功率值,为功率平衡控制提供可靠的理论依据。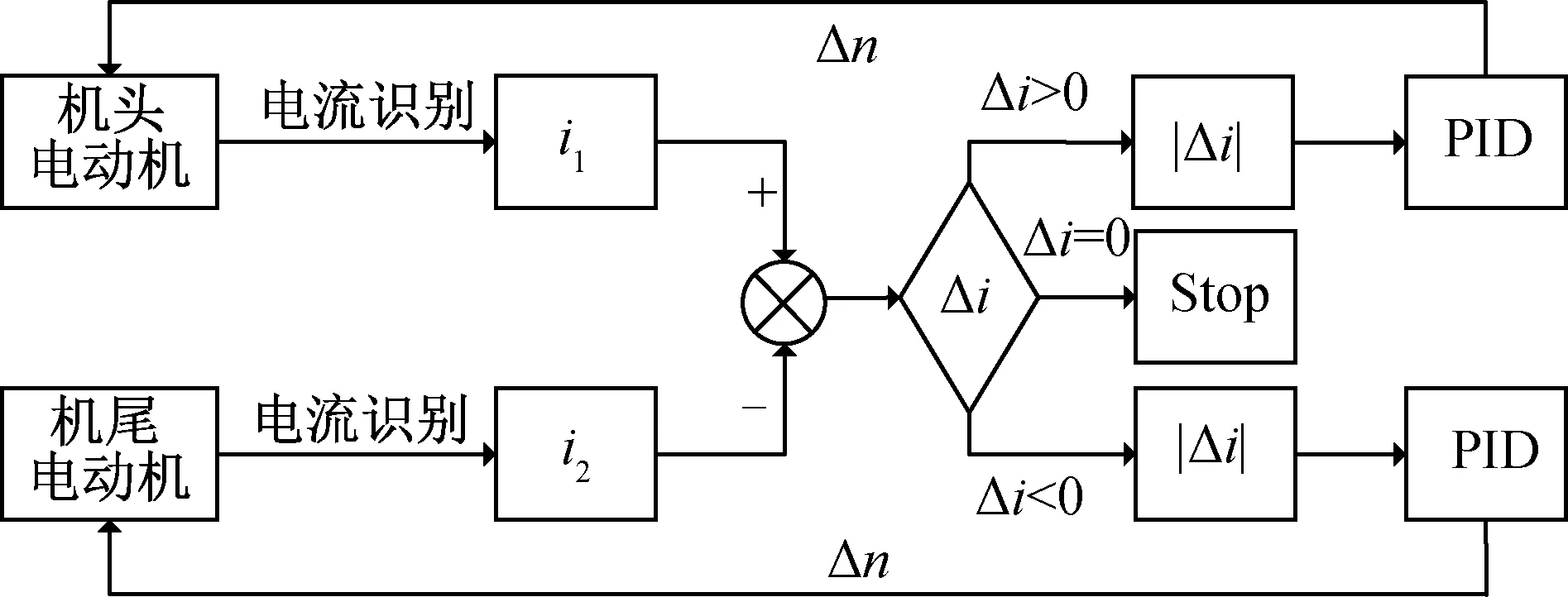
2.2 等效电动机机械特性分析

2.3 电动机功率配比方案
3 功率平衡控制系统设计

4 结 语
