双Y移30°永磁同步电机逆变器开路故障诊断方法
2020-03-26黄堃,张楠,黄麟
黄 堃,张 楠,黄 麟
(无锡职业技术学院 控制技术学院,江苏 无锡 214121)
0 引 言
双Y移30°永磁同步电机具有高可靠性,可以满足系统对高精度和高性能的要求,被广泛应用在电动车辆、船舶舰艇、航空航天等领域。此外,电机还具有以下几大优点:电磁转矩脉动低,容错能力强以及控制资源丰富等等[1-7]。
传统双Y移30°永磁同步电机需要十二开关逆变器驱动,逆变器开路故障频繁。当故障发生时,须提取故障信息,准确定位故障开关管,然后针对故障开关管进行容错控制,使系统恢复正常工作状态。由此可见,定位开关管故障位置显得尤为重要[8-13]。
国内外专家学者针对逆变器开路故障诊断进行了广泛的研究。文献[14]通过熔丝更改硬件电路,并且对开关管故障进行分析,为容错控制打下基础。文献[15]提出一种电压源故障诊断方法,通过将实际电压输出值与参考值进行比较,从而实现对逆变器的故障诊断。文献[16]通过定子电流检测,可以实时检测开关管故障信息,实现对开关管的精确定位。文献[17]通过比较开关管发射极和集电极之间的电压,无需测量硬件即可实现开关管故障诊断。
本文在电机逻辑动态模型基础上,提出一种逆变器开路故障诊断方法。为实时监测电机电压,构建无电压传感器的二阶滑模观测器,通过逻辑动态模型提供的电压先验信息与含有故障信息的电压实际输出值进行比较,准确定位故障开关管。
1 电机逻辑动态模型
相较于永磁同步电机,双Y移30°永磁同步电机拥有6个电流接口,故需要十二开关逆变器对电机进行驱动,驱动系统拓扑结构如图1所示。
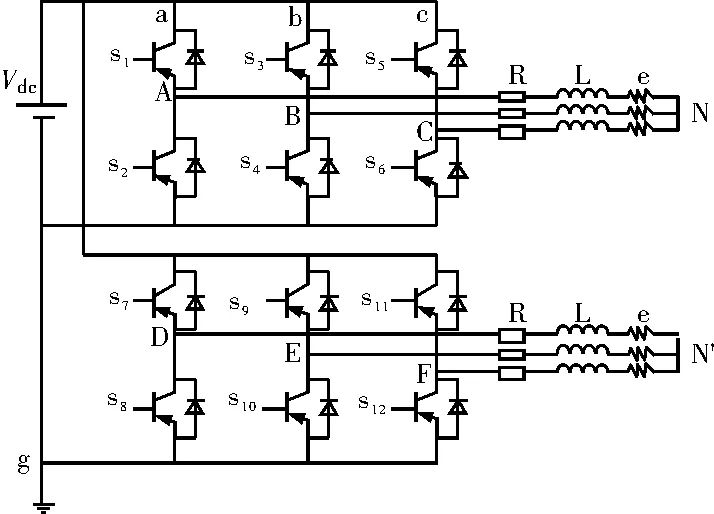
图1 双Y移30°永磁同步电机驱动系统
根据图1,可得双Y移30°永磁同步电机在自然坐标系下的数学模型为
(1)


根据图1,双Y移30°永磁同步电机相当于两个永磁同步电机各自独立工作,可得电机相电压表达式
(2)
根据矢量空间解耦变换,将相电压从静止坐标系变换至αβ坐标系,可得
(3)
将式(2)代入式(3),可得
(4)
根据式(4),当逆变器开关管出现故障时,会影响电机绕组端相对于直流母线接地端电压,从而影响αβ坐标系电压。传统逆变器驱动系统,输出电压主要由开关管信号决定,但其未考虑逆变器死区,不能完整描述逆变器输出情况。为了准确描述上述情况,需要对逆变器各个运行状态进行完整描述,构建逆变器逻辑动态模型。
定义ζ为电机电流流动方向,设ζ=1为电机电流从逆变器流入中性点,ζ=0为电机电流从中性点流出至逆变器。以a相桥臂为例,在考虑逆变器死区的情况下,可得电机A相绕组端对地电压如表1所示。
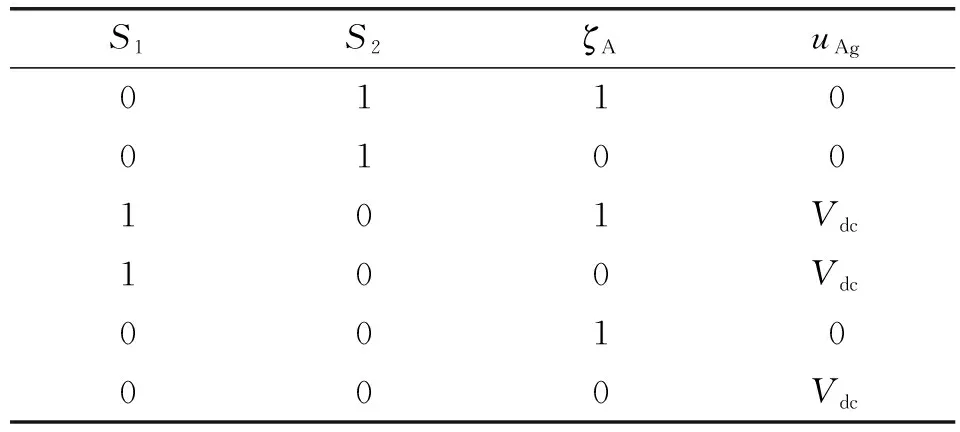
表1 电机A相绕组端对地电压
根据表1,可得电压uAg数学表达式为
(5)
同理,可以推导出电压uBg、uCg、uDg、uEg、uFg数学表达式,代入式(4),可得
(6)
式(6)即为电机逻辑动态模型αβ轴电压。
2 无电压传感器二阶滑模观测器
传统测量电机相电压需要电压传感器和其他检测电路,但会增加系统潜在故障源。为了增强系统的可靠性,提出一种无电压传感器的二阶观测器,用以对系统αβ轴电压进行观测。
根据式(1),可得电机在αβ轴静止坐标系的数学模型为
(7)
在式(7)基础上,构建二阶观测器
(8)
非奇异终端滑模面具有很好的抗扰动性能和收敛精度,适用于电机这种多变量、强耦合的非线性系统[18]。设计非奇异终端滑模面为
(9)

定理考虑系统(7),如果非奇异终端滑模面如式(9)所示,连续非奇异终端滑模控制律描述如下:
(10)


(11)
将式(8)减去式(7),得
(12)
将式(10)代入,并求导,得
(13)
将式(13)代入式(11),得
(14)
(15)

由式(10)可知,控制律Vα、Vβ中的符号函数经由积分环节滤波,可以很好的抑制抖振,解决传统滤波器所导致的相位延迟问题。
3 逆变器开路故障诊断方法
当逆变器发生开路故障时,系统实际输出电压相比于正常状态会出现畸变。本文针对不同开关管故障情况进行分析,给出了逆变器开路故障诊断方法。
(a)某一开关管开路故障

(16)
由上式可知,S1、S2、ζA为离散量,故电压残差Eα为0、Vdc/3,电压残差Eβ为0。
(17)
由上式可知,电压残差Eα为-Vdc/3、0,电压残差Eβ为0。
同理,可求其它开关管开路故障时的电压残差如表2所示。
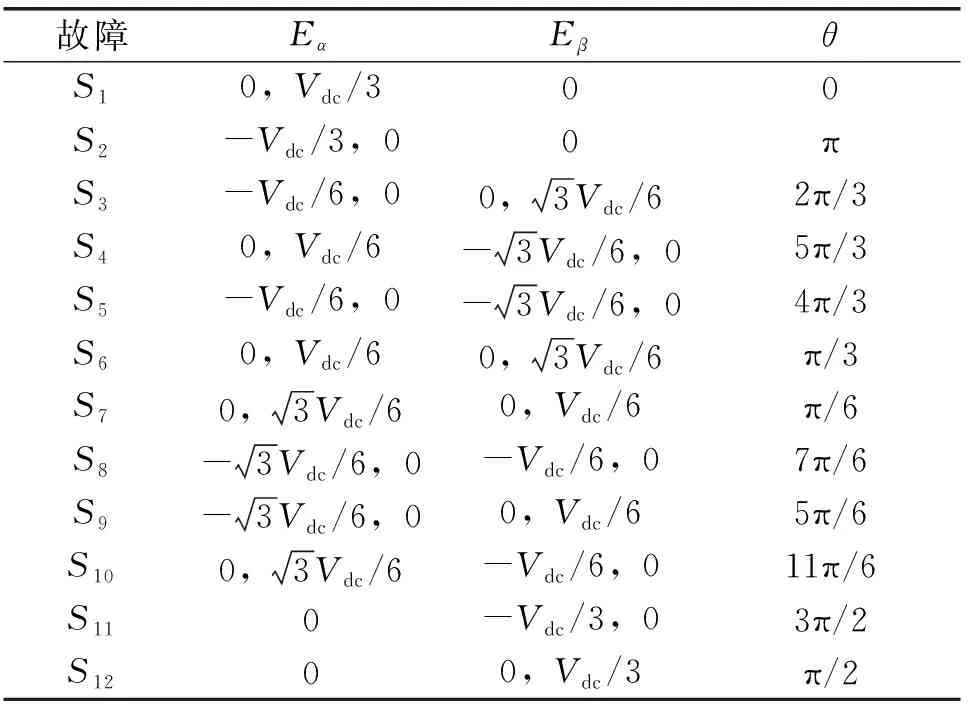
表2 某一开关管开路故障电压残差
(b)两开关管同时开路故障
两开关管同时开路故障分为两种情况:一是同一桥臂两开关管开路故障,二是不同桥臂两开关管开路故障。
(18)
可知,电压残差Eα为-Vdc/3、0、Vdc/3,电压残差Eβ为0。同理可求其它桥臂两开关管开路故障时的电压残差如表3所示。
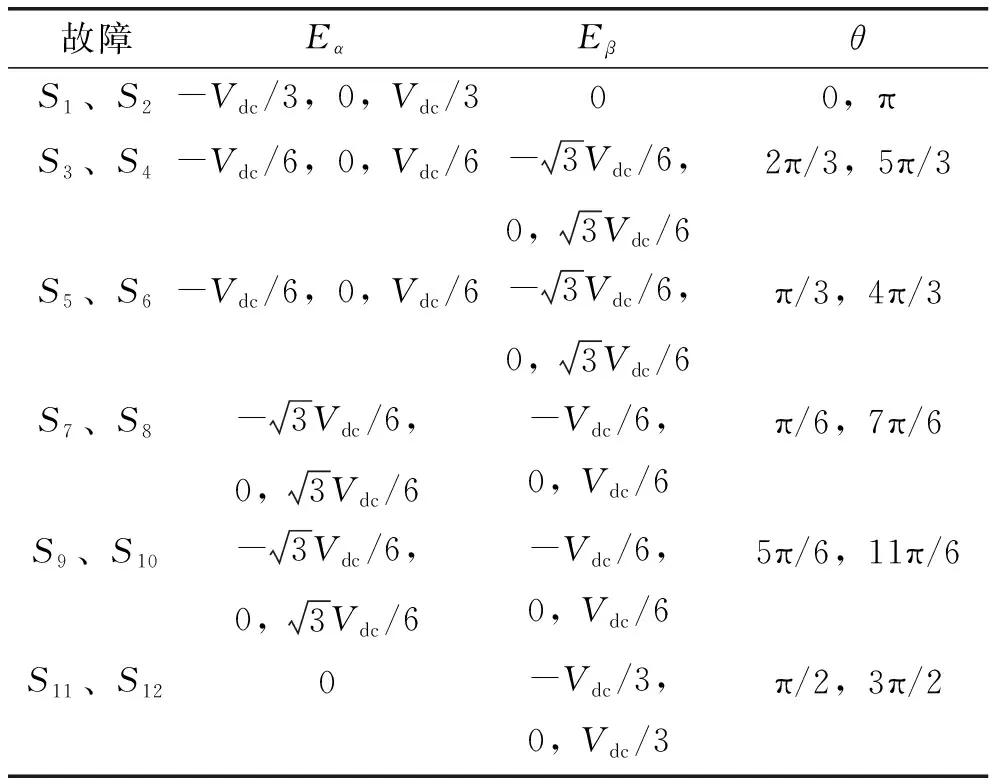
表3 同一桥臂两开关管开路故障电压残差
(19)
从式(19)可以看出,不同桥臂两开关管同时发生开路故障,电压残差的取值相当于两开关管分别发生开路故障时电压残差之和,故只需根据表2即可准确定位故障开关管。
4 仿真验证
双Y移30°永磁同步电机参数:定子电阻R=1Ω,d、q轴电感Ld=Lq=7.2mH,转子磁链Ψf=0.06Wb,转动惯量J=0.08g·m2,粘滞摩擦系数F=0.005B,极对数p=2,负载转矩TL=1N·m。采样周期Ts=0.0001s,直流侧母线电压Vdc=300V。图2为双Y移30°永磁同步电机正常运转时的六相电流波形。图3(a)、图3(b)为从0.5s开始,每隔0.1s依次出现S1~S12开关管开路故障所得的电压残差Eα、Eβ波形。图4(a)、图4(b)为0.1s时同一桥臂S1、S2开关管开路故障所得的电压残差Eα、Eβ波形。图5(a)、图5(b)为0.1s时不同桥臂S1、S3开关管开路故障所得的电压残差Eα、Eβ波形。
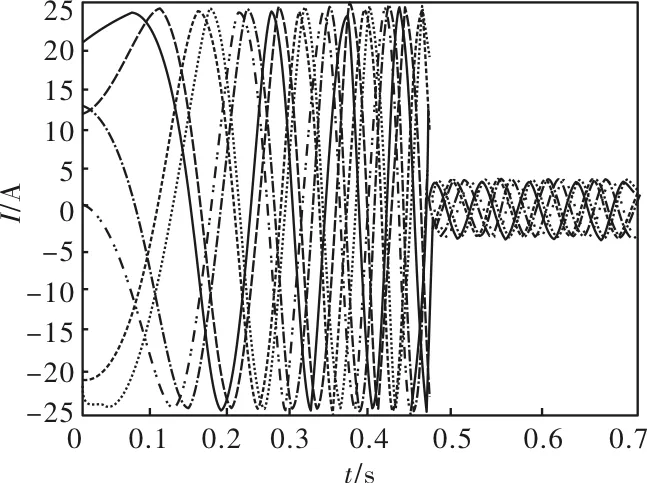
图2 电机六相电流波形
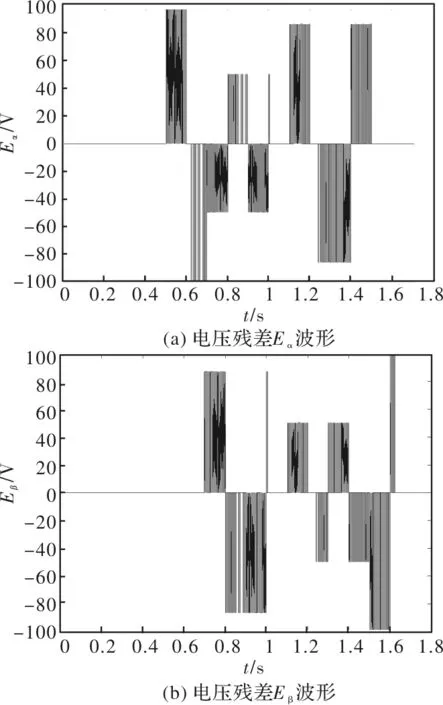
图3 某一开关管开路故障
根据图3给出的十二种开关管开路故障电压残差波形,跟表2所推导出的理论值一致。根据某一时刻Eα、Eβ取值,可以准确定位故障开关管。
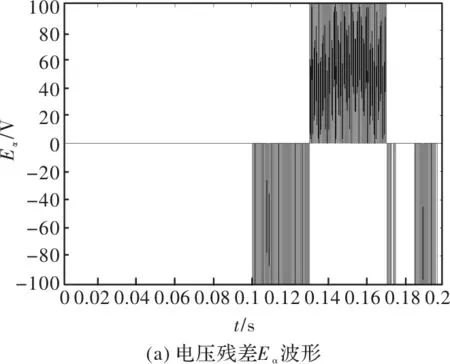
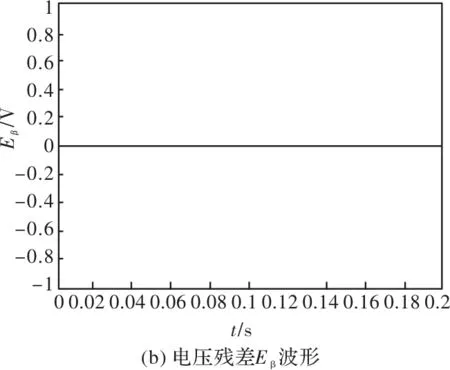
图4 S1、S2开关管开路故障
从图4可以看出,电压残差Eα取值-100、0、100,电压残差Eβ取值0,符合表3开关管S1、S2开路故障情况。
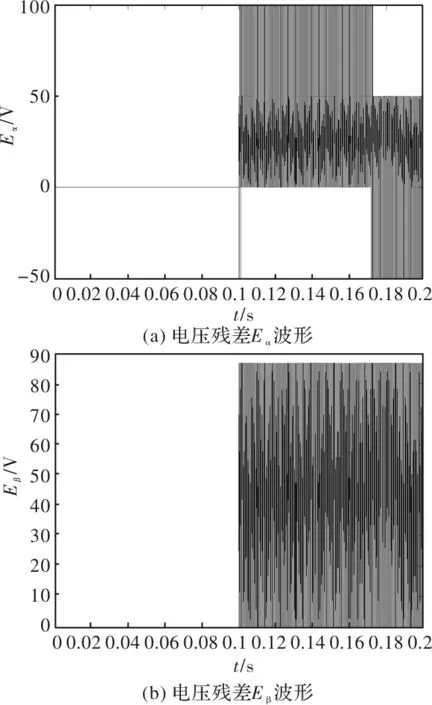
图5 S1、S3开关管开路故障
从图5可以看出,电压残差Eα取值-50、0、50、100,电压残差Eβ取值0、86.6,符合根据表2推导出的开关管S1、S3开路故障情况。
5 结 语
本文在电机逻辑动态模型基础上,提出一种逆变器开路故障诊断方法。首先该方法不需要额外电压检测电路,减少系统潜在故障源。其次,该方法至少可以对两个开关管故障进行精确定位。
