基于GA的磁悬浮球系统的Anti-windup变结构PI控制
2020-03-24韩光信
杨 瑶,韩光信
(吉林化工学院 信息与控制工程学院, 吉林 吉林 132022)
近年来,磁悬浮技术被广泛应用于机械、交通、工业等方面,例如无摩擦轴承、高速列车、精密仪器除振台、磁悬浮天平等[1].但不可否认的是,磁悬浮技术距离大规模的行业应用仍有很长的路要走[1].由于磁悬浮球系统是典型的非线性系统,其控制技术作为磁悬浮技术的核心,众多国内外学者提出了多种控制器,其中最常见的有PID控制器[2]、鲁棒控制器[2]、模糊控制器[3]、自适应控制器[3]、神经网络控制器[4]等,但传统的工业控制较多还是采用PID控制.通过参数的选取可以构成PI、PD控制,PID控制结构简单,调节方便,应用广泛,但在高精度的磁悬浮球技术中,由于系统的非线性,常规的PID控制并不能完全满足工程的需要[1].针对控制器的设计,选取Anti-windup 变结构PI控制器,结合遗传算法优化参数,使小球能快速稳定跟踪期望位置,并保持平衡.仿真结果表明,与常规PI控制器相比,变结构PI控制器可以使小球快速稳定地跟踪期望位置且效果明显.
1 磁悬浮球系统的工作原理及模型描述
1.1 磁悬浮球系统工作原理
磁悬浮球系统由被悬浮对象、光电传感器、控制器、功率放大器构成.系统利用电磁铁的引力作用使被控对象悬浮在平衡位置,传感器获得小球的位置信号,此位置信号作为控制器的输入信号,经控制器的控制算法计算输出控制信号,控制信号经功率放大器转化成控制电流,控制电流驱动电磁铁在钢球上产生电磁力,使小球稳定悬浮[5],其示意图如图1所示.

图1 磁悬浮球系统示意图
1.2 磁悬浮球系统建模
磁悬浮球系统主要由电磁铁电路部分和磁悬浮球的动力学部分组成.电磁铁电路部分主要由线圈电阻Rc和线圈电感Lc组成,Ic和Vc分别为流经电磁铁线圈的电流和线圈两端的电压.Rs是电流感应电阻,与Rc、Lc串联,电压传感器Vs用于测量线圈中的电流.磁悬浮小球的动力学部分主要由小球和位置传感器组成,其中Mb为小球质量,rb为小球半径,xb为小球位置,Tb为小球最大位移,Fc为小球所受到的电磁力,Mg为小球自身重力.
通过对磁悬浮球系统的动力学方程、小球竖直方向的受力情况、电磁铁的磁场强度与流经电流的关系等分析,可以得到磁悬浮球系统的线性部分和非线性部分的数学模型如下[6]:
(1)
磁悬浮球系统是典型的非线性系统,但是非线性系统在一定范围内或者一定条件下可以近似认为是线性系统.在平衡点(xb0,ic0)附近进行Taylor展开,忽略高阶项得到下式[7]:
(2)
整理可得
(3)
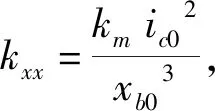
将(3)式进行拉式变换得到系统的传递函数:
(4)
采用的Quanser公司生产的磁悬浮球系统半实物仿真平台,各个参数如表1所示[6].
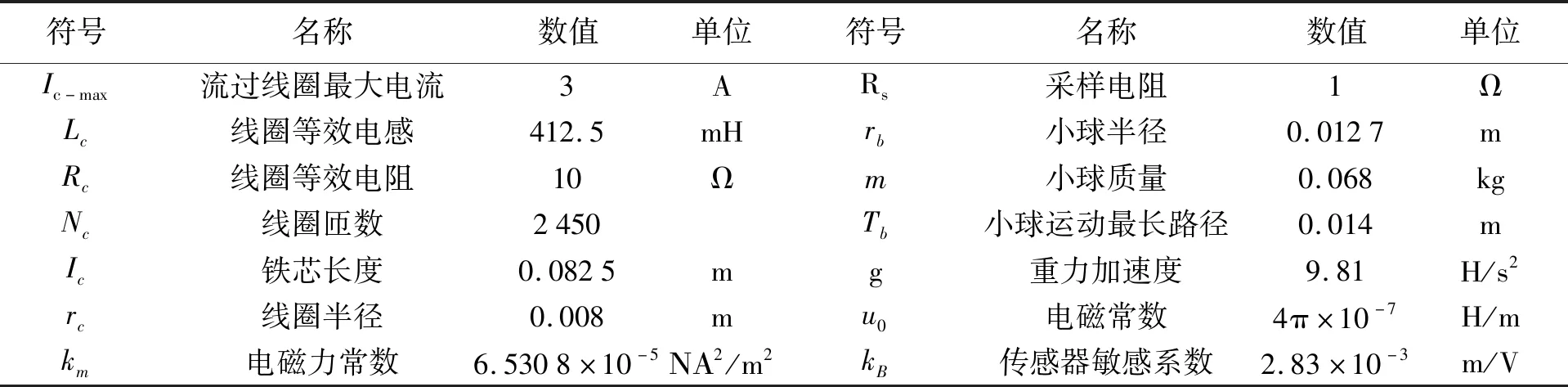
表1 数据参数
2 基于GA参数优化的Anti-windup PI控制器设计
在PID控制器中,比例系数Kp主要影响系统的响应速度,增大Kp,速度越快;反之,比例系数减小,系统的调节时间将会增加,但是当系统接近稳态时,如果比例系数过大,则会导致超调过大,甚至会导致系统不稳定[8].积分系数Ki主要影响系统的稳态性能,积分作用能消除系统静差,但在响应开始,一般偏差过大,如果积分系数选取不适当就会使系统响应过程产生较大的超调或出现饱和现象[9].
2.1 Anti-windup PI控制器
针对积分windup现象,A.S.Hodel等提出了积分抗饱和的变结构PID控制算法[10],其结构如图2所示.
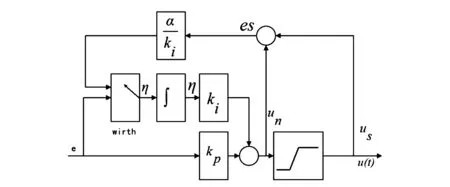
图2 基于Anti-windup的PI结构原理图
其算法公式为:
un=us,
(5)

在常规PI控制器中,输入一旦产生偏差,这时候比例环节就会起作用,来减小偏差,比例系数越大,系统的响应速度越快,但系统会产生超调.控制器的积分作用就是为了消除系统的余差而设置的,但其存在滞后现象,使系统的响应速度变慢,如果超调过大,系统还会产生振荡.而变结构PI控制器可以通过误差的变化对PI参数进行实时监控.当误差变化较小时,可以通过调节响应速度,防止产生过大的超调量,来保证系统具有良好的稳定性.当误差变化较大时,减小超调量、缩短调节时间,来消除稳态误差.由此可以看出采用Anti-windup变结构PI控制比常规PI控制响应速度快且无超调,调节时间短、稳态精度高、运行平稳.
2.2 GA参数优化
遗传算法Genetic Algorithms简称(GA),它将“优胜劣汰,适者生存”的生物进化原理引入优化参数形成的编码串联群体中,按所选择的适配值函数并通过遗传中的选择、交叉和变异对个体进行删选,使适配值高的个体被保留下来,组成新的群体,新的群体继承上一代的信息,又优于上一代[11].这样周而复始,群体中个体适应度不断提高,直到满足一定的条件,基本流程图如图3所示,其算法简单,可并行处理,能得到全局的最优解[12].
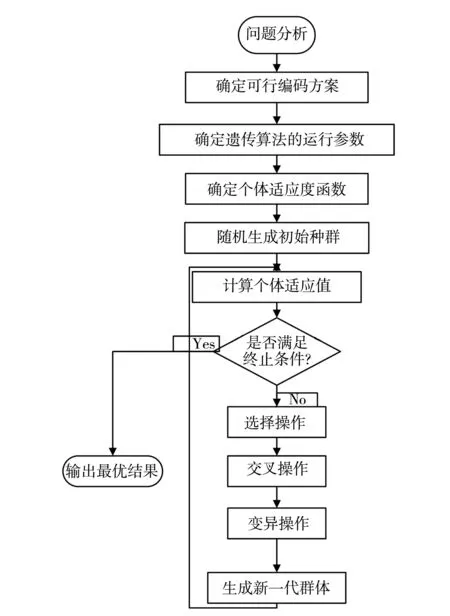
图3 基本遗传算法的算法流程图
控制器采用Anti-windup变结构PI控制器和前馈增益[12].通过调节P、I、α值来使小球快速跟踪目标曲线,当采用手动调节时,小球能跟踪到目标曲线,但花费时间较长且结果并不理想,因此采用遗传算法来优化这3个值.
3 仿真结果与分析
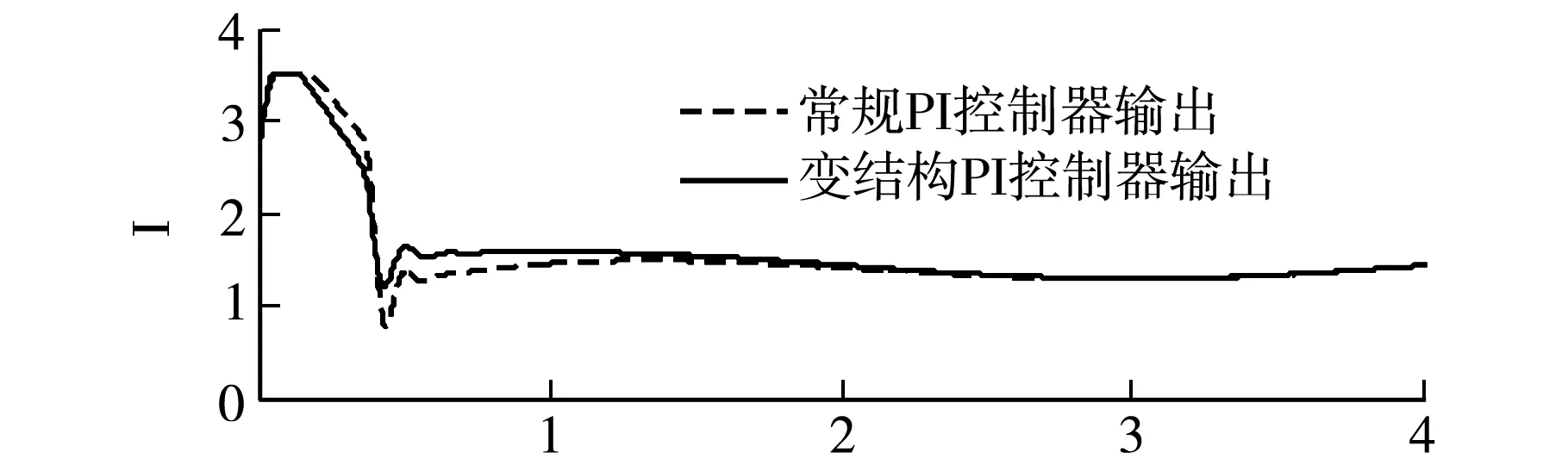
为了使小球能快速跟踪到理想曲线,控制器采用变结构PI控制器,并利用遗传算法优化kp、ki、α这3个参数,其中遗传算法参数选择种群大小为30,迭代次数为50,边界条件为-300≤kp≤100,-300≤ki≤100,0≤α≤0.2,图4表示在每进行1次迭代后,整体适应度都比上一代有所减小,目标函数趋于最小值,种群总体适应度提高,得到优化的变结构PI控制器参数为kp=-285.715 3,ki=-281.039 4,α=0.192 4.而传统PI控制中取kp=-254.187 0,ki=-54.643 4[5],仿真结果可以看出常规PI控制也能使小球跟踪到目标曲线,但反应速度慢,超调大.图5给出优化后的变结构PI控制和常规PI控制得到的控制输出结果和位置跟踪结果.
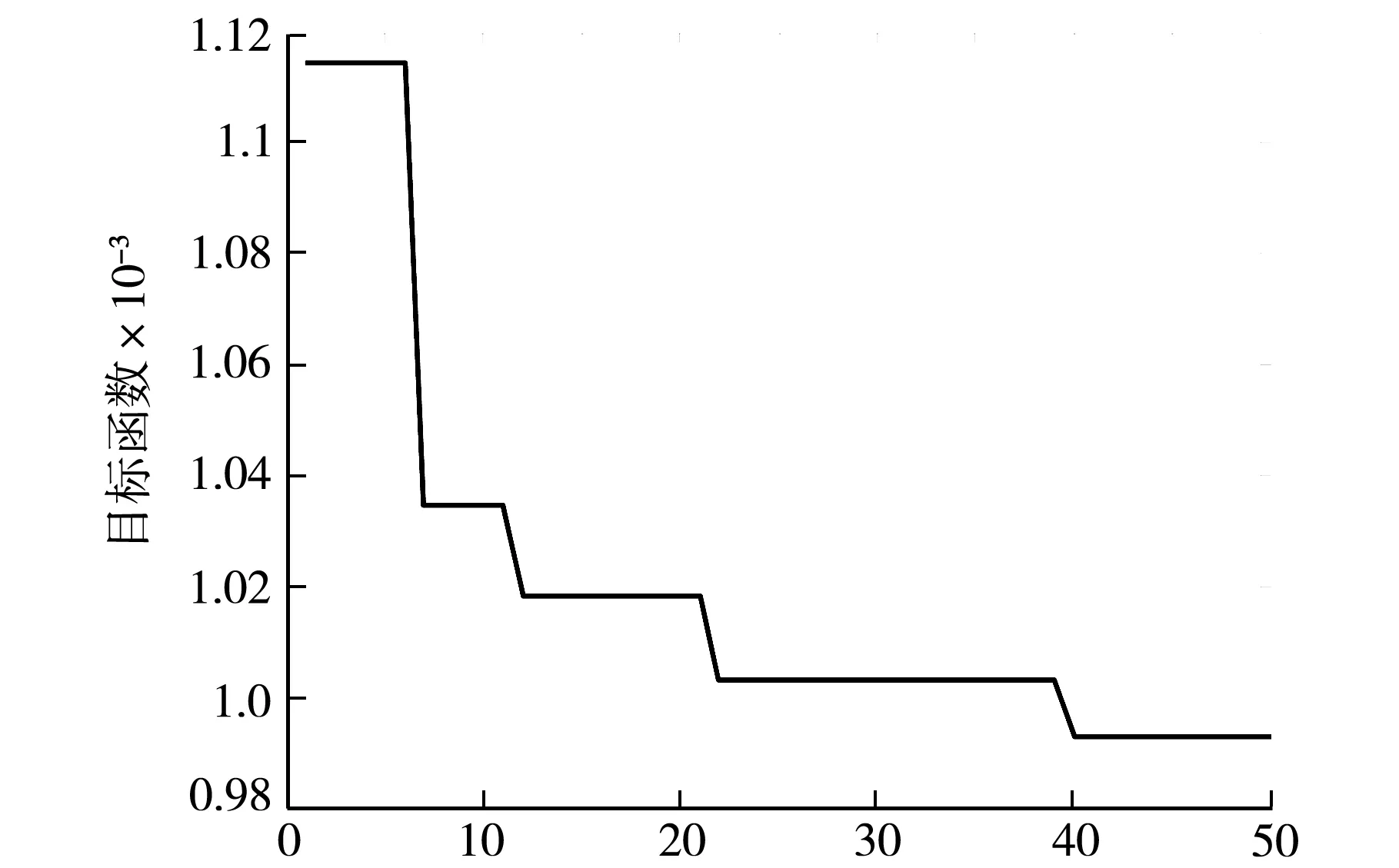
迭代次数图4 目标函数J的优化过程
时间/s
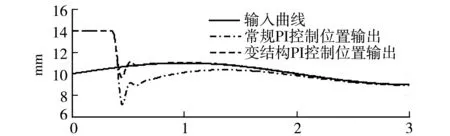
时间/s图5 控制器输出与位置输出
从图中可以看出,变结构PI控制比常规PI控制响应速度快且超调量变小,且当系统出现饱和时,变结构PI控制可以主动调整控制量使控制输出尽快回到饱和范围内,因此变结构PI控制对饱和约束速度比常规PI控制要快得多.仿真结果表明变结构PI控制可以使小球快速跟踪输入曲线且超调量小,反应时间快具有一定的抗饱和效果.
4 结 论
本文针对磁悬浮球系统,设计了一种Anti-windup变结构PI控制器,利用遗传算法对P、I、α这3个参数进行优化,来使小球能够快速稳定的跟踪到输入曲线.仿真结果表明变结构PI控制器无论反应速度还是跟踪性能与常规PI控制器相比都具有一定的优越性.