双人陆地龙舟训练器的机械结构设计
2020-03-24徐朝阳李艳龙胡志勇原晓阳马立民
徐朝阳,李艳龙,胡志勇,原晓阳,马立民,陈 雪
(北华大学 机械工程学院,吉林 吉林 132021)
如今龙舟赛在全国普遍开展[1],龙舟运动是一种群体性、大规模的水上项目,龙舟项目对场地和器材要求较高.龙舟运动的场所一般为自然的湖泊和江河,虽然南方高校所在地的水系较多,但一般较远,并且雨水较多,运动训练存在难度[2],由于北方气候相对寒冷,河流在一年中有几个月的冰封时期,运动员进行龙舟训练的时间较短,其训练水准也会受到一定的影响[3].肌力与肌耐力是完成一切正常身体活动的基础[4],竞技龙舟运动作为体能主导类耐力性运动项目,划桨技术和速度是取胜的关键,运动员必须经历长时间、高强度的专项耐力训练[5-6].国内外研究人员设计了多种针对上肢体能训练的机械,如龙舟测力器、D型风阻划船机等,但比赛时,运动员需要在极高桨频下重复划桨技术动作[7],有待开发训练运动员划桨技术的训练器.因此,研发一种新型集划桨训练、模拟水面为一体的龙舟训练器,不仅能够模拟龙舟在水中的运行状态,还能检测运动员的训练状况,对龙舟运动员摆脱恶劣气候和水环境的限制在陆地上进行训练具有极其重要的意义.
1 双人陆地龙舟训练器方案设计
双人陆地龙舟训练器的方案设计如图1所示,龙舟训练器主要由安全平衡框架、舟体、划桨训练装置和模拟水面装置组成,设计安全平衡框架主要对舟体和运动员起到支撑和保护作用.舟体采用仿梭型式设计,增强训练的真实感,通过改变踏板与舟座的相对位置,适应不同运动员的身高差异.划桨训练采用标准的划桨轨迹,轨迹设计为内外轨道,从而训练运动员的划桨姿势.设计有上肢力量训练器,采用风轮与空气摩擦,为运动员提供阻力,训练上肢力量.运用滑轮与圆形导轨结合的方式,带动船体沿着导轨进前后移动,使舟体在行进过程中出现前后倾斜和左右摇摆.
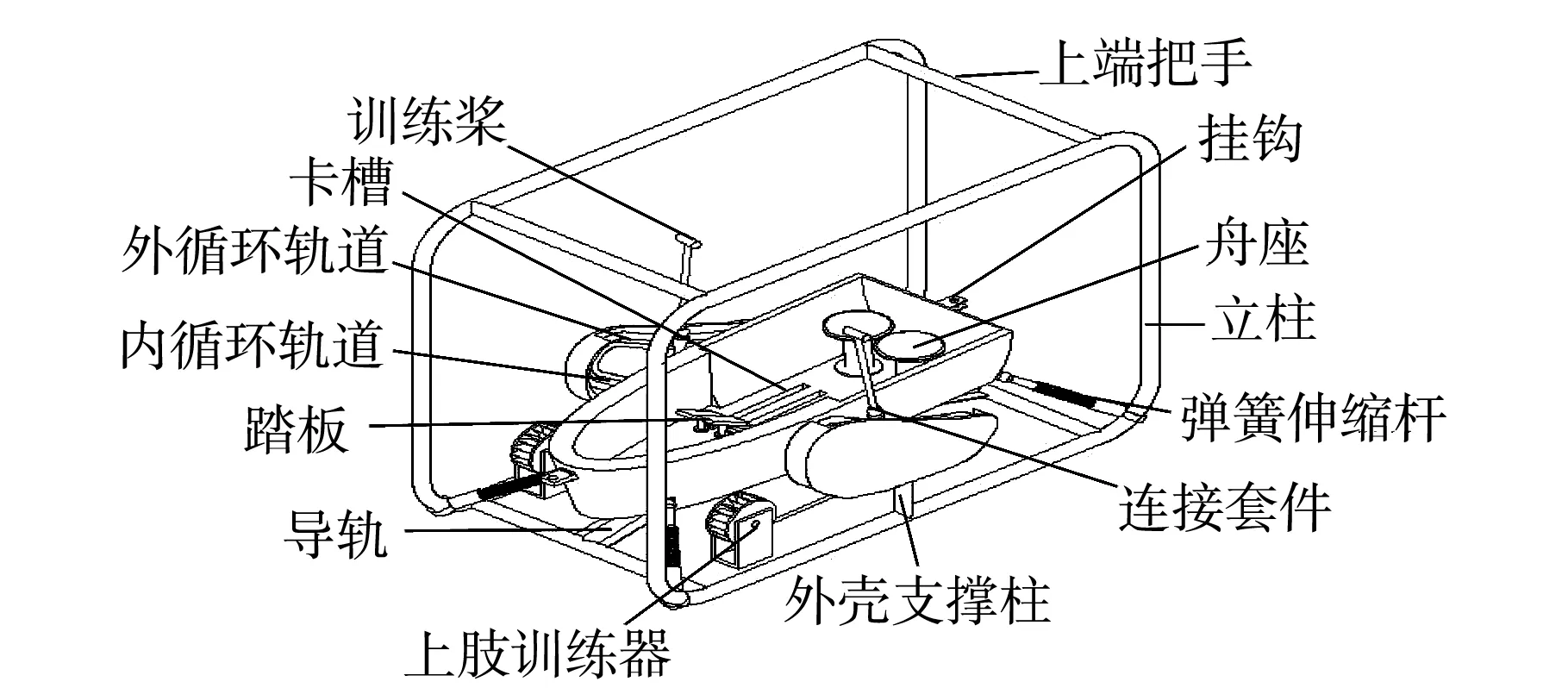
图1 双人陆地龙舟训练器方案三维图
2 安全平衡框架设计
2.1 安全平衡框架设计
安全平衡框架由立柱、导轨、外壳支撑柱、上端把手等构成,如图1所示.安全平衡框架主要用于支撑舟体和保护运动员不受到伤害,在运动员遇到危险时,可通过握紧上端把手,维持自身平衡脱离危险,导轨用于支撑舟体,立柱用于固定弹簧伸缩杆,外壳支撑柱用于支撑轨道外壳.
2.2 支撑力分析
安全平衡框架的支撑能力取决于立柱和导轨的刚性强度,将立柱与弹簧组连接的各支点和导轨支撑点分别用六个点来表示,其平面的坐标分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)、(x5,y5)、(x6,y6)如图2(a)所示,再将舟体上的六个受力点分别用六个点来表示,其平面坐标分别为(x7,y7)、(x8,y8)、(x9,y9)、(x10,y10)、(x11,y11)、(x12,y12)如图2(b)所示.通过训练器的六部分受力点的运算和分析,得出船体平衡受力情.如图2所示.

(a)
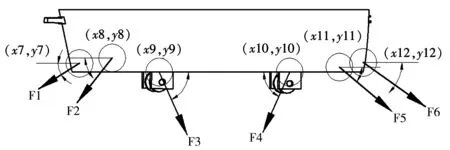
(b)图2 龙舟框架和舟体受力分析示意图
由第一立柱受力点和舟体上第一受力点位置的坐标值可以推出:
(1)
式中θ1表示第一立柱受力与水平面的夹角.
由第二立柱受力点和舟体上第一受力点位置的坐标值可以推出:
(2)
式中θ2表示第二立柱受力与水平面的夹角.
由第一支撑点和舟体上第一受力点位置的坐标值可以推出:
(3)
式中θ3表示导轨第一支撑点受力与水平面的夹角.
由第二支撑点和舟体上第一受力点位置的坐标值可以推出:
(4)
式中θ4表示第二支撑点受力与水平面的夹角.
由第三立柱受力点和舟体上第一受力点位置的坐标值可以推出:
(5)
式中θ5表示第三立柱受力与水平面的夹角.
由第四立柱受力点和舟体上第一受力点位置的坐标值可以推出:
(6)
式中θ6表示第四立柱受力与水平面的夹角.
由公式(1)、(2)、(3)、(4)、(5)、(6)推理得出:
舟体竖直方向上受力:F1sinθ1+F2sinθ2+F5sinθ5+F6sinθ6=F3sinθ3+F4sinθ4
(7)
舟体水平方向上受力:
F1cosθ1+F2cosθ2+F5cosθ5+F6cosθ6=F3cosθ3+F4cosθ4
(8)
式中F1表示第一立柱受力的大小,式中F2表示第二立柱受力的大小,式中F5表示第三立柱受力的大小,式中F6表示第四立柱受力的大小,式中F3表示导轨第一支撑点受力的大小,式中F4表示导轨第二支撑点受力的大小.
3 舟体设计
舟体整体和锁死机构示意图如图2所示.龙舟队因队员身高不同、手臂长短不同、坐高不同、力量大小不同、桨位不同,所以应根据情况来选择划桨的长度,以达到最佳的划桨效果[8].舟体整体如图3(a)所示为,满足不同身高的运动员,应对踏板增设可调节机构以适应不同运动员的下肢差异,增强龙舟的适应性.双人陆地龙舟在舟体下方设有锁死机构,双人陆地龙舟舟体锁死机构如图3(b)所示.当运动员伸直双腿时,可选择合适的踏板位置,由锁死机构进行固定.锁死机构设计成可嵌卡式,通过调节踏板与踏板下方卡槽之间的位置,使踏板与舟座发生相对位置变化,以满足不同运动员的训练要求.舟体前后方设有挂钩,可连接多组训练器同时训练,增强运动员之间的默契.
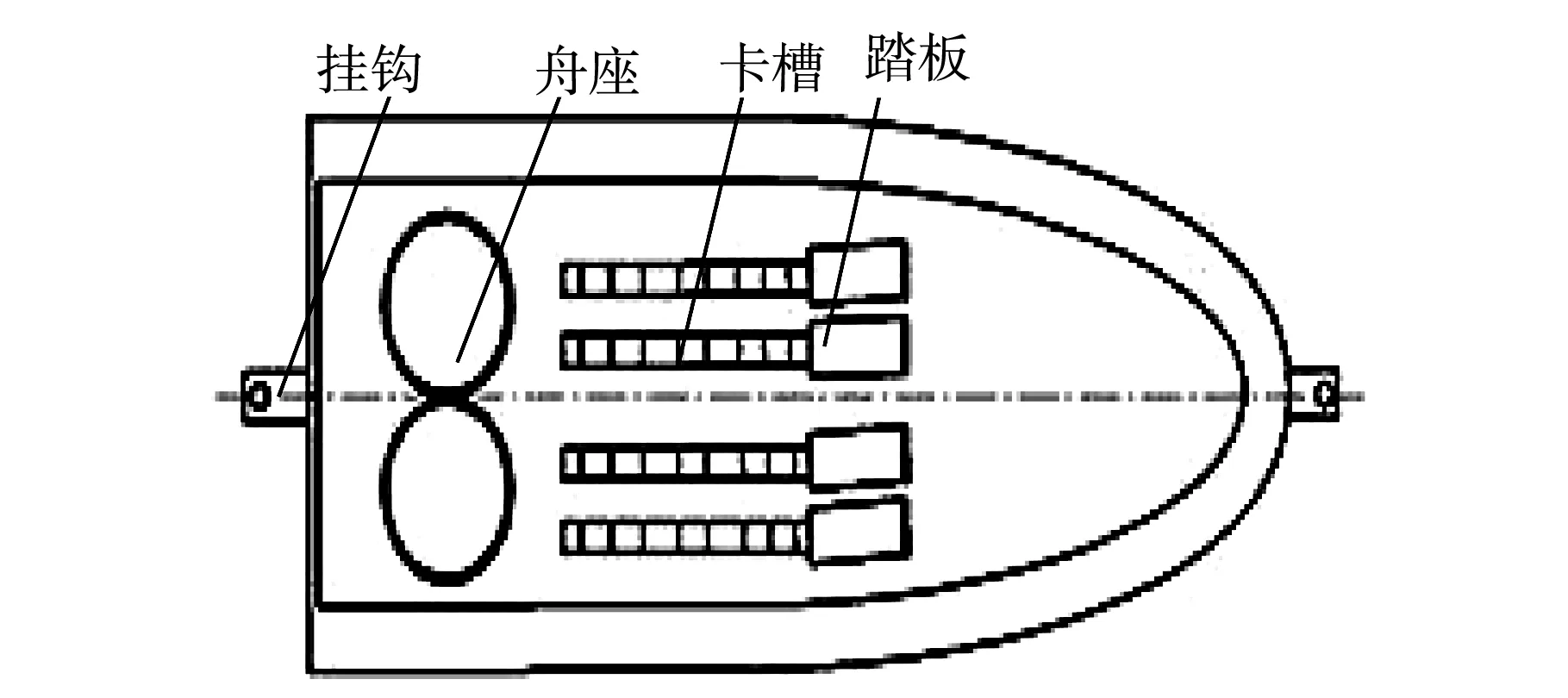
(a) 俯视图

(b) 平视图图3 舟体整体和锁死机构示意图
4 划桨训练装置设计
在一个划桨周期内肘关节、膝关节、肩关节以及内外弦两侧的腕关节都要处在科学合理的位置范围,如果一旦发生错位就会影响船体的重心,船体的平衡被打破自然会直接影响赛艇的前进方向以及前进速度,加大运动员体力与耐力的过度消耗[9].运动员划桨训练机构由姿势训练机构、上肢力量训练器两部分组成(如图4所示).为了使划桨姿势准确,尽可能多的提供前进的动力,采用模拟真实的划桨运动轨迹方式进行训练,划桨运动轨迹模拟装置设计为内外循环轨道样式,训练桨与连接套件采用球连接的方式使训练桨可120°内自由旋转,连接套件固定在内循环轨道和外循环轨道之间,沿内循环轨道和外循环轨道将动力传给钢丝线,钢丝线将动力传给风轮,风轮由于空气阻力的影响,传递阻力给舟体,从而带动舟体前后运动,实现整个划桨训练机构的前后运动.内外循环轨道是按照专业龙舟运动员的划桨轨迹设计而成的,符合人体结构学原理.训练桨采用的是将桨叶去掉的训练桨杆,连接套件代替桨叶.运动员通过长时间的滑动训练桨达到训练上肢力量的效果,使运动员长时间在水面划桨.
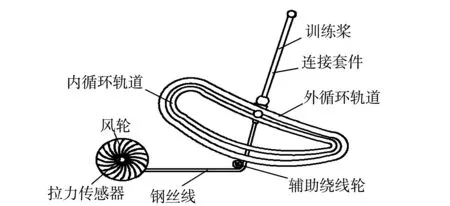
图4 划桨训练装置示意图
5 模拟水面装置设计
当龙舟运动员进行比赛时,由于两名运动员的体重、身高和重心不同,会造成舟体前后倾斜摇晃.为模拟比赛时龙舟的状态,双人陆地龙舟训练器增设模拟水面装置,模拟水面装置由弹簧伸缩杆、压力传感器、导轨和舟体下方滑轮构成,如图5所示.导轨采用曲面设计,舟体通过下方滑轮带动,沿导轨进行滑动,模拟龙舟在行进过程中的前后倾斜.弹簧伸缩杆的作用是防止倾斜角度过大造成舟体倾翻,维持舟体平衡,保护运动员不受伤害.每个弹簧伸缩杆上都设有压力传感器,当船体向前倾斜时,伸缩杆挤压弹簧,弹簧收缩,产生压力,压力大小由压力传感器进行显示.通过记录压力传感器示数总结出两名运动员分别对船的推力,实时向两名运动员传递数据,使运动员可以及时做出调整,通过长时间训练,两名运动员对船的推力达到统一,增强划桨效果.
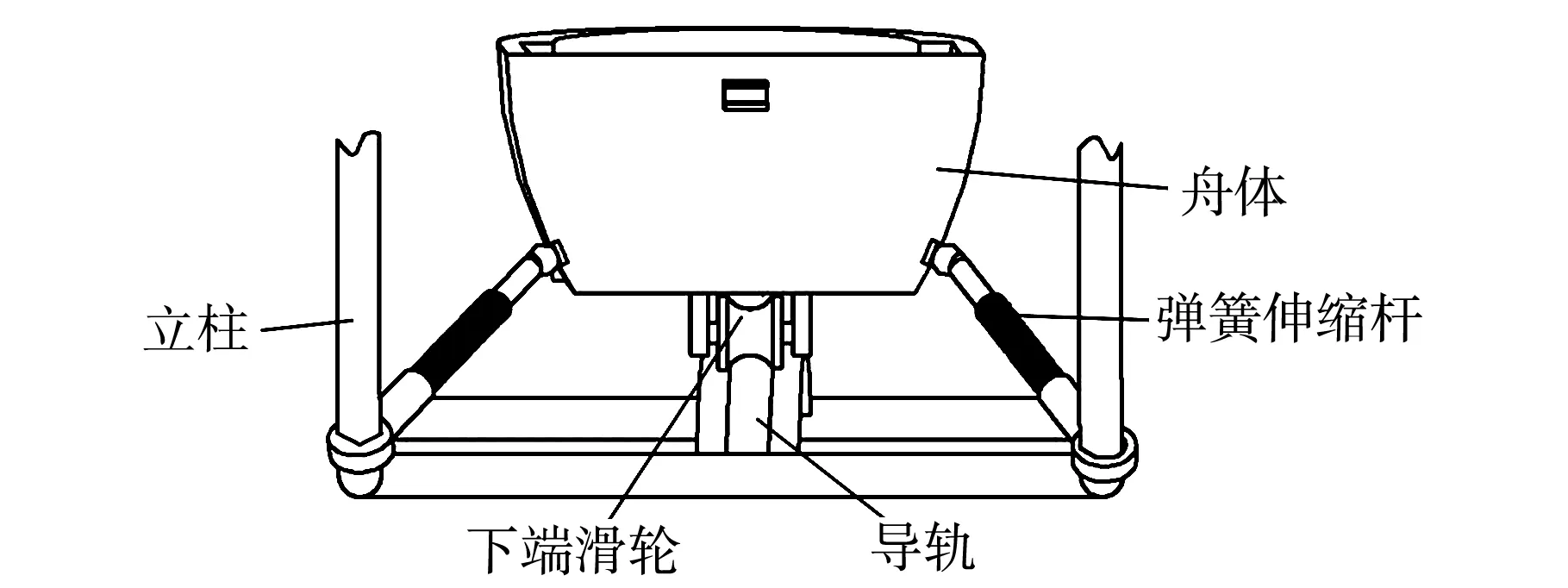
图5 模拟水面装置示意图
6 双人陆地龙舟训练器整体设计
双人陆地龙舟训练器总体结构如图6所示,由安全平衡框架、舟体、划桨训练装置和模拟水面装置构成.安全平衡框架采用可拆卸的四柱式框架结构,对舟体和运动员起到支撑和保护作用.舟体采用仿船舟式设计,增强训练的真实感,通过改变踏板与舟座的相对位置,适应不同运动员的身高差异.龙舟运动拉桨运动技能的学习是运动员对技术动作深入理解的过程:建立技术概念,形成技术动作,最后达到动作自动化[10].划桨训练装置采用标准的划桨轨迹设计为轨道,约束运动员的划桨姿势.前方设有上肢力量训练器,为运动员提供阻力,训练上肢力量,带动船体沿着导轨进行前后移动.配合模拟水上装置,使舟体在行进过程中出现前后倾斜和左右摇摆.
7 结 论
为了解决龙舟运动员无法在陆地上进行训练,研制了一款在陆地上模拟水上状态,训练划桨姿势的双人龙舟训练器.
(1)训练器采用可拆卸的四柱式框架结构起达到保护作用,通过计算,分析了安全平衡框架的支撑能力,并对训练器的总重量进行了校核.
(2)训练器采用踏板与卡槽相结合的方式,调节踏板与舟座之间的相应位置适应不同运动员的身高差异.
(3) 训练器通过将真实的划桨轨迹体现出来的原理,对运动员的划桨技术动作进行规范化约束,让运动员沿着循环轨道做规范的划桨动作,再通过风轮模拟水中的速度载荷.
(4)训练器通过曲面导轨与滑轮配合模拟龙舟在水中行走的前后倾斜和左右摇摆,模拟水中龙舟的运行状态.