基于角平分线特性的轨道炮轨间距测量方法分析
2020-03-20裴朋超李明涛
裴朋超,曹 斌,李明涛,葛 霞,李 可
(西北机电工程研究所,陕西 咸阳 712099)
电磁轨道炮依靠电磁力将弹丸发射出去[1-2],较传统常规火炮具有炮口初速高、射程远、控制简单等优势,在未来具有极高的军事应用前景[3-5]。轨道是轨道炮发射器的核心部件,不同于常规火炮炮管采用直接加工而成,轨道炮发射器身管一般采用组装方式,因此在装配过程中,由于各零部件的加工误差、装配误差及环境温度等各因素影响,造成装配完成后的轨道间距在一定范围内会发生随机变动。在电磁发射过程中,电枢与轨道间为高电压、大电流下的滑动电接触状态[6-7],轨道间距随机变化使得枢轨接触间隙变化不一,导致滑动电接触状态复杂多变,当轨道与电枢间接触间隙过大时,发射过程中会导致在接触间隙处发生电打火甚至电爆炸等事故,严重时影响到轨道使用寿命[8]。目前国内外在分析枢轨电接触状态时,将轨道处理成理想轨道,有关轨道间距变化对发射过程或者滑动电接触状态影响的相关报道较少,因此开展轨道间距测量工作,对分析枢轨电接触状态及轨道损伤影响因素具有重要指导意义,可用于指导轨道炮的工程化设计。
1 轨道间距测试原理及方案组成
1.1 轨道炮炮膛截面形式
目前电磁轨道炮轨道形态主要有平轨和圆轨两种[9-10],其中圆轨形式的包括下凸和上凹两种,所对应的炮膛结构如图1所示。对平轨炮膛截面,轨道间为平行平面关系,轨道间距可视为两平面间的距离;对圆轨炮膛截面,轨道间距即为两圆弧顶点间的距离,在对圆轨炮膛轨道间距进行测量时,由于轨道炮炮膛截面不同于平轨炮膛截面,在测量过程中必须保证测量点位于轨道圆弧顶点处,即要求测量装置具有对中性,增大了轨道间距测试难度。

1.2 轨道间距测量原理
理想条件下,装配完成后的两轨道间距是一固定值,即上、下轨道间保持空间平行关系。但实际中,引入的各种误差会导致上、下轨道并不处于完全平行状态,沿轨道长度方向轨道间距在一定范围内随机变化。由于在电磁发射过程中轨道受电磁斥力作用,在轨道装配时,会沿轨道长度方向约束轨道变形[11],因此轨道发生大变形的可能性较小,假设在一定长度范围内轨道间距是均匀变化的,则将上、下轨道位置关系可看作互成一定角度的两条直线,如图2中直线C1D1和C2D2所示。

在图2中,两条轨道C1D1和C2D2成一定夹角,直线AB为其角平分线,在直线AB上任取两点C、D,过C点作CC1和CC2分别与C1D1和C2D2垂直,同理作DD1和DD2分别与C1D1和C2D2垂直,连接C1C2和D1D2与直线AB分别交于点C3和D3,根据角平分线相关特性可知C1C2和D1D2分别垂直于角平分线AB,则C1C2和D1D2分别对应是点C3和D3处的轨道间距;同理,在角平分线AB上任取一点E,过E点作EE1和EE2垂直于直线AB,通过测量E1E2的长度即可获得点E处的轨道间距数值,根据图2中几何关系,可得:
(1)
(2)
同理可得:
(3)
根据对称性知,当轨道炮炮膛空间尺寸较小,测试装置受限于炮膛尺寸制约时,只需测量EE1或EE2即可获得点E处的轨道间距数值,对较小口径轨道炮轨道间距测量方案具有重要指导意义。
1.3 轨道间距测量方案设计
根据图2所示测量原理,设计图3所示测试方案,方案组成主要包括基准板、测量传感器、前支撑机构、后支撑机构及测量单元等。
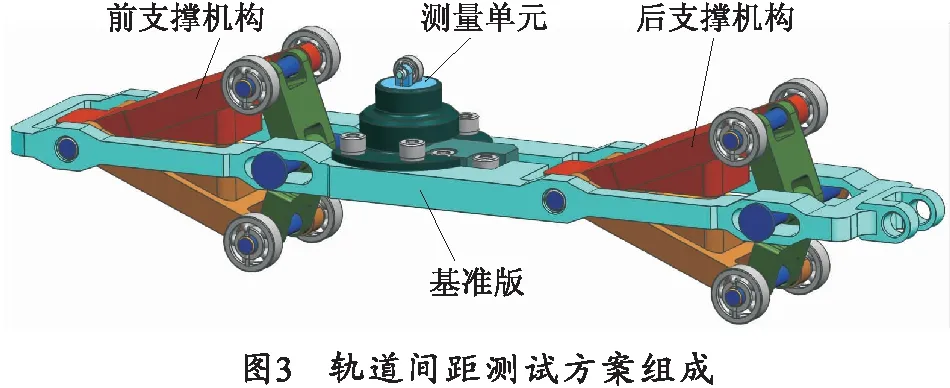
其中基准板是测量的基准,在支撑机构作用下基准板平分上、下轨道间夹角;测量传感器为高精度非接触式电涡流位移传感器,布置在基准板上,用于测量基准板法向方向距离,分辨率为1 μm,满足测试要求;支撑机构包括前、后两部分,每部分在弹簧作用下,始终保证其与基准板的连接点处于轨道夹角平分线上,这样在前、后支撑机构作用下,基准板时刻平分轨道间夹角,测量装置中基准板在前后支撑机构的作用下,时刻处于轨道夹角角平分线处;测量单元为一固定长度模块,在弹簧力作用下时刻和轨道接触,该测试方案下,传感器测量数据与测量单元长度相加即为该测点处轨道间距的一半。
2 测量误差分析
2.1 测量原理引入的误差
由于测试原理中假设轨道间距在一定长度范围内均匀变化,并将上、下轨道位置关系看作互成一定角度的两条直线,测量方案根据角平分线相关特性,利用前、后支撑机构在弹簧力的作用下,使基准板平分轨道夹角。若前后支撑机构支撑点偏离轨道夹角平分线,则无法保证基准板时刻平分轨道夹角,给测试结果带来误差。
如图4所示,假设点O为前支撑机构与基准板的连接点,点E1为传感器安装位置,E1F1为测量方向,所测轨道间距LE1F1=h1,设LOE1=l,当基准板绕点O转动角度β,即OE1转动到OE2处时,测量方向E1F1随之偏转角度β,所测轨道间距LE2F2=h2,则由此带来的测试误差大小为
Δδ=h1-h2.
(4)
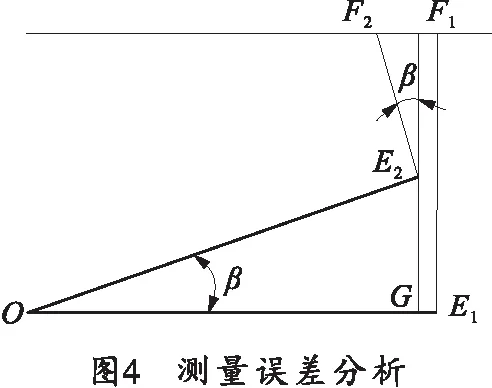
LE2G=h3=l tan β,
(5)
(6)
(7)

2.2 自动回正校核
在对圆轨截面炮膛轨道炮进行间距测量时,假设炮膛截面如图5所示,在测试过程中,必须保证基准板相对上、下轨道中性面不发生倾斜。支撑机构滚轮在轨道上滑动时,设两滚轮间距为s,弹簧作用力为F,点O为轨道圆弧圆心,α为滚轮与轨道接触点处圆弧半径与力F的夹角。

为保证滚轮在弹簧力F作用下具有自动回正功能,弹簧作用力F沿圆弧切向分力大于表面摩擦力,即F1≥f,有:
F1≥μF2,
(8)
Fsinα>μFcosα.
(9)
设滚轮与轨道的摩擦系数μ=0.2,则有α≥11.31°,当轨道圆弧面半径r=20 mm时,有:
s=2rsinα=7.84 mm .
(10)
即当支撑机构滚轮间距s大于7.84 mm时,滚轮可以自动回正,在本测试方案中,滚轮间距s为20 mm,因此在测量过程中测量装置可以自动回正。
3 数据测量及分析
为保证测量结果的准确性,特设计一套验证装置,如图6所示,包括“平轨”和“圆轨”两种形式,用以验证测量结果的准确性。
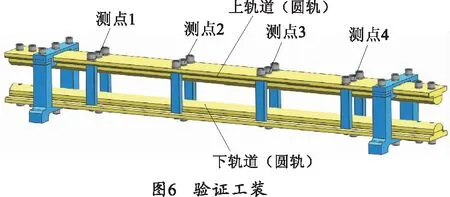
验证装置主要包括两条导轨和支撑柱,支撑柱与轨道间通过螺栓连接,通过三坐标检测仪精确测量4个测点处的轨道间距值作为测量值1,当测量装置在轨道间移动时,测试过程如图7所示,可分别获得4点处的轨道间距数值,作为测量值2,将两组测量结果对比,如表1、2所示。
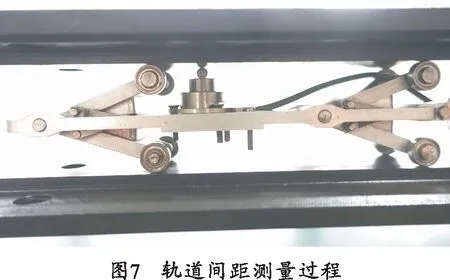
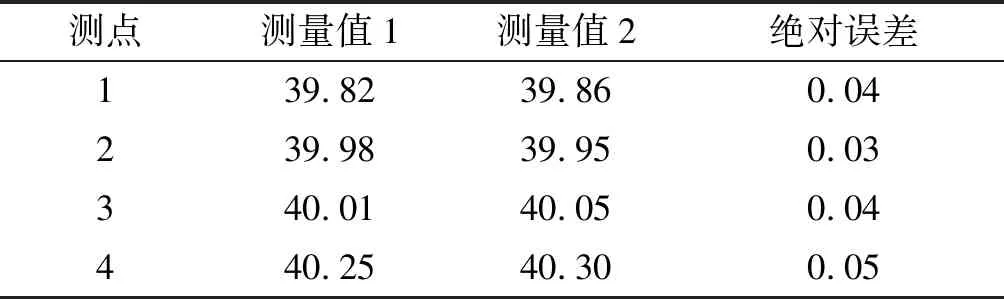
表1 平轨间距测量数据对比 单位:mm
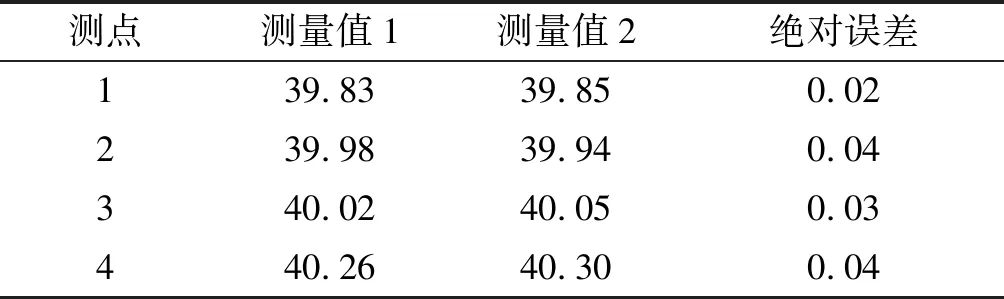
表2 圆轨间距测量数据对比 单位:mm
通过分析表1、2数据发现,两组测量结果误差较小,在“平轨”测试数据中,最大误差出现在测点4,误差大小为0.05 mm,在“圆轨”测试数据中,最大误差出现在测点2和测点4,误差大小为0.04 mm,从所测数据可发现,“圆轨”测量误差较“平轨”普遍较小,这主要是因为测量装置在“圆轨”中通过时有较好的自动回正性,因此在相同测点附近,所测数据重复性好。
从测试结果可发现,该轨道间距测量装置数据测量分辨率达到10 μm,且数据测量误差最大为50 μm,大于理论分析误差11 μm,主要原因是因为测量方法、加工误差及环境温度等因素导致的,由于目前国内外尚无轨道炮轨道间距变化对发射过程影响相关参考文献,因此参考常规火炮设计经验,当身管口径变化不超过身管尺寸的1%时,可认为口径变化对发射性能的影响较小。在本次验证工装中,模拟40 mm口径炮膛,测量装置测试精度达到10 μm,且误差在20~50 μm范围内,可满足40 mm口径范围及以上的轨间距测试要求,可用于指导轨道炮轨道间距测量工作。
4 结论
根据轨道间距变化规律,提出一种基于角平分线特性的轨道间距测试方法,制作出轨道间距测量装置,并完成轨道间距测量工作,获得轨道间距数值,为验证测量数据的准确性,设计一套验证工装对测量结果进行验证,获得的主要结论如下:
1)沿轨道长度方向局部范围内的轨道间距发生较大变化的可能性较小,轨道间距可认为是均匀变化的,在一定长度范围内可将轨道位置关系近似看作是互成一定角度的两条直线。
2)基于角平分线特性的轨道间距测量方法,其测量原理误差主要受l和β影响,且Δδ随着l和β的增大而变大。
3)在针对40 mm口径轨道炮进行间距测量时,测量结果表明测试精度达到10 μm,且误差大小为20~50 μm,因此可满足40 mm口径范围及以上的轨间距测试要求。
4)从所测数据可发现,“圆轨”测量误差较“平轨”普遍较小,这主要是因为测量装置在“圆轨”中通过时有较好的自动回正性,因此在相同测点附近,所测数据重复性好。
测量数据误差较小,满足轨道间距测试精度要求,可用于轨道炮轨道间距测量工作。轨道间距数据的测量,对分析间距对发射过程影响具有重要意义。