基于食品包装箱码放的码垛机器人运动学
2020-03-13陈亚琳
陈亚琳
南京工业职业技术学院(南京 210023)
对产品进行码垛是食品生产线上一个非常关键的步骤,传统的码垛是通过人力将包装箱通过一定的排列顺序码放在码盘上。随着生产线速度的提高,人工成本的上升,产业结构正在发生巨大的改变,利用机器人代替人力是一个必然的趋势[1-4]。主要研制一台基于食品包装箱码放的码垛机器人,并对其做运动学分析。然后运用ADAMS软件建立了虚拟样机模型,根基实际作业循环情况,设定其运动参数,得到了末端执行器的位移、速度与加速度相对于时间的曲线。
1 码垛机器人的结构设计
设计的码垛机器人是用在食品生产线上,其布置位置如图1所示,设计的码垛机器人工作效率为2.5 s/箱,最大负载为100 kg。码垛机器人的工作流程是:1)抓取包裹;2)搬运包裹到码盘上方并调整位置;3)放置包裹;4)返回初始位置。具体工作时间分配如图2所示。
综合各因素考虑,试验设计的码垛机器人结构为四自由度的平行四连杆圆柱坐标式码垛机器人[5-6],结构简图如3图所示。该机器人主要由臂部机构、底座、腕部旋转机构及腰部旋转机构等组成,其水平和竖直运动分别由伺服电机带动通过同步带连接的滚珠丝杠旋转,从而带动丝母座平东实现水平和竖直运动,腰部和腕部的旋转可以分别独立进行,不仅结构简单,而且易于控制。腰部和腕部旋转分别由伺服电机经过减速机增扭实现腰部关节和腕部关节的旋转。臂部结构组成平行四边形,从而实现位移的放大功能。各个臂的结构大小如表1所示,水平位移的放大倍数为6,竖直位移的放大倍数为5。

图1 生产线位置布置

图2 码垛机器人工作时间分配

图3 码垛机器人结构简图

表1 码垛机器人各臂杆结构尺寸 mm
2 码垛机器人运动学分析
对机器人进行运动学研究主要是对机器人的运动学特性进行分析,是对机器人进行控制理论的研究和轨迹规划计算的基础。一般是根据机械本体结构建立坐标系和运动学模型,从而求得末端执行器相对于建立的基坐标系的位置、速度、加速度等方程。对机器人进行运动学分析一般是分析其正运动学和逆运动学[7-8]。正运动学分析是已知机器人的关节变量及几何参数,求末端执行器的位置相对于基坐标系的方程;逆运动学分析是对正运动学的逆运算,即已知机器人的末端执行器相对于基坐标系的位置和和几何参数,求各关节变量的运算[9-10]。采用D-H法建立码垛机器人的运动学方程,用齐次变换矩阵来推导码垛机器人中各坐标系相对于基坐标系的位置关系,从而求导出其正运动学方程和逆运动学的方程。

表2 码垛机器人D-H坐标系参数
2.1 正运动学分析
根据图3所示的坐标示意图建立D-H坐标系,涉及的参数如表2所示。根据D-H法从底座的基坐标系z0-x0依次变换到腕部机构的坐标系z4-x4,得到其运动学方程:

其中:
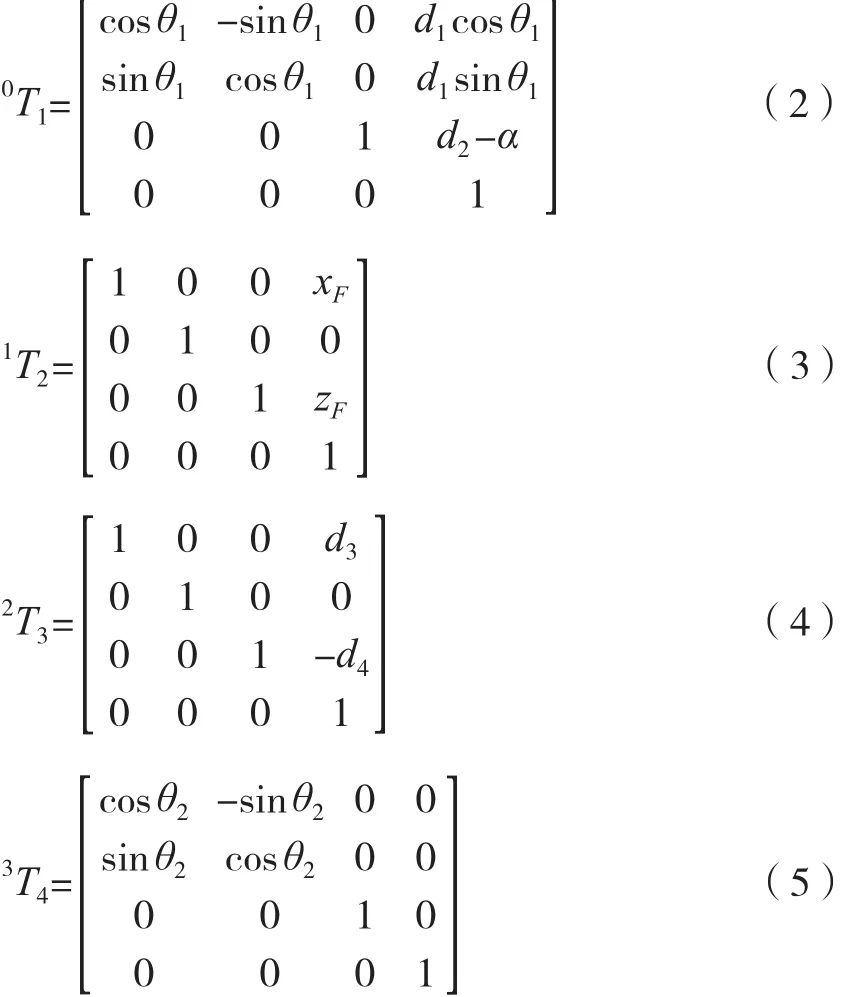
将上节中的结构参数代入,得到腕部执行器的正运动学方程:

从式(6)中可以看出,腕部的位置是由腰部的旋转变量θ1、臂部的水平滑块的移动变量xC以及竖直滑块的移动变量zA共同决定的,而腕部的姿态是由底座的旋转变量θ1和腕部的旋转变量θ4共同决定的。由于其四个变量是相互解耦的,所以此码垛机器人具有控制算法简单的特点。
2.2 逆运动学分析
逆运动学分析是根据矩阵运算法则,已知式(6)的左端,求解右端的四个变量θ1、θ4、xC和zA的值。
设机器人腕部末端执行器相对于底座基坐标系的角度为β,则:

根据式(8)中第2行第4列相等,式(9)中的第3行第4列相等和第1行第4列元素相等,得到4个变量θ1、θ4、xC和zA的方程:

从式(10)可以看出,末端执行器的水平位移和腰部、腕部的旋转变量与xON、yON有关,而竖直位移只与zON有关。所以竖直滑块的移动决定了码垛机器人末端执行器在z方向的位移。水平滑块的移动、腰部旋转和腕部的旋转决定了末端执行器在x、y方向的位移。
2.3 速度和加速度分析
对运动学逆解方程两边分别对时间t求导,得到码垛机器人各运动关节的速度反解的矩阵:
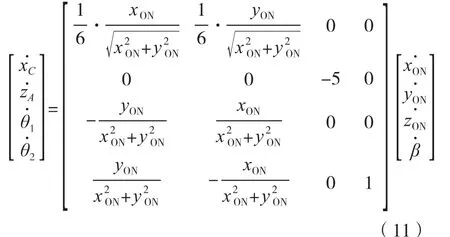
所以速度正解矩阵为:

对式(12)两边分别对时间t求导,得到码垛机器人各运动关节加速度正解的矩阵:

3 码垛机器人运动学仿真分析
根据设计的结构参数与确定的结构形式,绘制码垛机器人的三维模型,将绘制的三维模型导入ADAMS中,定义各个零部件的材料属性、质量密度参数,为了便于区分,可以将不同零件赋予不同的颜色,设置工作环境,并对模型进行简化,将不会发生相对运动零件的锁定处理,或者进行布尔操作,将其合并为一个零件,如果进行布尔操作,需要对新合成的零件进行重命名,并赋予新的材料和质量属性[11-15]。将设计的码垛机器人的底座、电机,同步带轮等零件合并为一个部件。模型参数设定完成后,根据机器人的运动特性,添加约束和运动副。根据机器人实际的作业情况,在各个运动附上添加载荷及驱动。
按照设计的码垛机器人的作业循环步骤和时间,对其进行动作顺序设置,设定的一次总的作业循环时间为2.5 s,并根据图2设定各个运动关节的动作循序和时间,仿真得到末端执行器关于时间的位移、速度和加速度曲线。如图4~图6所示。
通过图4可以看出,末端执行器的位置是由腰部的旋转、臂部水平滑块和竖直滑块的移动共同决定的,仿真结果与上节的运动正解推导计算结果一致,证明了运动正解推导过程的正确性。由图5和图6可以看出,末端执行器的速度、加速度变化曲线数值合理,变化平稳,证明了所设计的码垛机器人具有合理的结构,能够平稳的工作,符合使用要求,而且速度与加速度的变化曲线与上节中速度与加速度方程的理论推导结果一致,验证了运动学逆解理论推导的正确性。
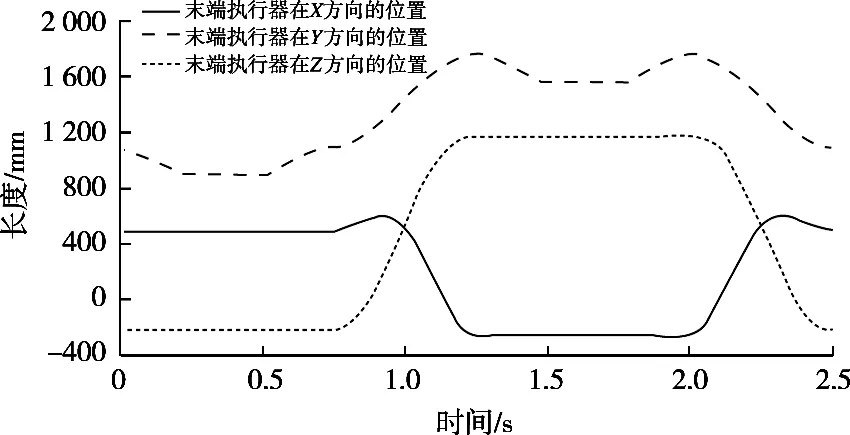
图4 末端执行器在X、Y、Z方向的位移曲线

图5 末端执行器在X、Y、Z方向的速度曲线

图6 末端执行器在X、Y、Z方向的加速度曲线
4 结论
基于食品食品包装箱码垛生产线,设计了一台四自由度码垛机器人,给出了其各项结构参数,并在结构设计的基础上采用D-H法推导出了其正、逆运动学方程,并推导出各运动关节的速度与加速度的数学方程,建立三维模型,然后运用ADAMS软件建立了虚拟样机模型,根据实际作业循环情况,设定其运动参数,得到了末端执行器的位移、速度与加速度相对于时间的曲线,验证了运动学理论分析的正确性,证明了设计的码垛机器人能够平稳高效地作业。为食品包装箱码机器人的选型、轨迹规划及控制系统的设计提供了有效的理论依据,为码垛机器人大范围应用于食品工业提供了有效的技术支持。
