三自由度海浪模拟器运动分析和控制系统设计*
2020-03-10王仕奇李向国梅志千朱灯林
王仕奇,李向国,2*,梅志千,2,朱灯林,2
(1.河海大学 机电工程学院,江苏 常州 213022;2.常州市特种机器人及智能技术实验室,江苏 常州 213022)
0 引 言
在船舶和船用设备的研发过程中,设备需要在模拟的海浪环境下进行试验。目前采用的主要试验方法有两种:(1)在专业的港航实验室,通过造波机生成海浪;(2)使用海浪模拟器实现海浪模拟。造波机试验具有成本高、危险性大等缺点[1],而海浪模拟器具有可控性好、经济和可靠的特点[2]。
并联机构适合用于海浪模拟器的机械结构。目前的海浪模拟器大多采用6自由度并联机构(即Stewart平台),能实现6个自由度的运动模拟(垂荡、纵荡、横荡、横摇、纵摇和艏摇)。李继东[3]采用Stewart机构和液压伺服驱动方式设计了并联六自由度船舶模拟器;魏亮[4]采用了Stewart机构,使用西门子S7-300PLC实现了Stewart平台的运动控制,并开发了一种6自由度海浪模拟器。但Stewart结构的海浪模拟器结构复杂、运动耦合度高、造价高昂,而且很多船用设备使用了船舶动力定位技术[5],消除了船体的纵荡、横荡和艏摇,这种情况下使用6自由度模拟器会造成资源浪费。事实上具有横摇、纵摇和垂荡3个自由度的海浪模拟器即可满足模拟要求。
海浪模拟器的误差主要由机械加工、装配误差和控制系统控制误差构成。相比于6自由度海浪模拟器,3自由度海浪模拟器的误差主要集中于横摇、纵摇和垂荡这3个主动输入运动,而这3个固定自由度的附加运动误差远小于输入运动的误差,可忽略不计。
本文采用三转动副-移动副-球副(3-RPS)并联结构,具有2个旋转自由度和1个移动自由度;并对3-RPS并联结构进行运动学和工作空间分析,设计其运动控制系统。
1 运动学与工作空间分析
1.1 海浪模拟器的机械结构
模拟器由动平台、基座和3个对称分布的运动支链组成。3个支链通过铰链与基座连接,再通过球铰与动平台连接,铰链的转动轴线垂直于基座,与动平台的中心连线;铰链和球铰均匀分布在基座和动平台上,构成两个正三角形;支链中的移动副由3个电动缸构成。电动缸采用Lim-Tec的DMB20,采用松下伺服电机作为驱动,使用同步带和滚珠丝杠传动,3个接近开关作为正、负限位和原点信号。
海浪模拟器结构参数如表1所示。
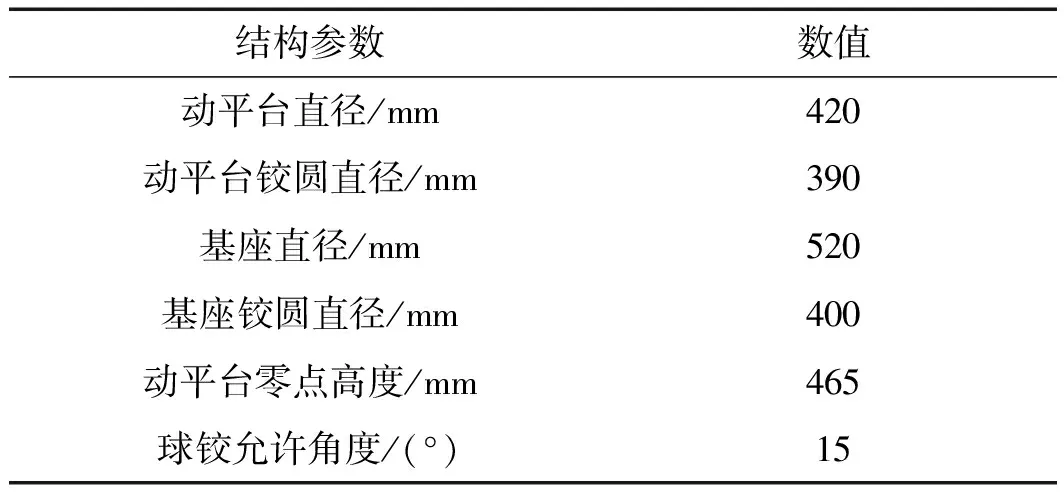
表1 海浪模拟器结构参数
1.2 逆运动学分析
3-RPS并联机构的正运动学分析要求解一组具有强耦合性的非线性方程组,复杂度高,不利于实时运动控制[6];逆运动学求解简单、方便编程实现,可用于运动控制。
本文分别在基座和动平台上建立静坐标系和动坐标系。
3-RPS并联机构坐标系如图1所示。

图1 3-RPS并联机构坐标系
该坐标系以3个转动副的铰支点组成正三角形A1A2A3,中心O为静坐标系的坐标原点,OA1为坐标系的X轴;Z轴过O点与静平台垂直,其正方向向上;根据右手法则可以确定Y轴及其方向。动坐标系C-xyz与静坐标系的建立过程类似。由Kutzbach Grubler公式可求得3-RPS的自由度[7]:
(1)
式中:n—杆件的数目;g—运动副的数目;fi—第i个铰链的自由度数。
求得3-RPS并联机构的自由度为3,分别是2个旋转自由度和1个移动自由度,满足海浪模拟器自由度的要求。
本文采用绕旋转轴的Z-Y-X欧拉角来描述动平台的姿态,由绕旋转轴的Z-Y-X欧拉角即可得动平台在该位姿的旋转矩阵,加入动平台的中心点坐标,将旋转矩阵扩展为包括了刚体平移的齐次变换矩阵T。通过矩阵T和3个铰支点在静坐标系中的坐标,即以得出某一位姿时动平台的3个铰支点在静坐标系中的坐标[8],即:
(2)
进一步可求得3个移动副的长度为:
(3)
式中:Ai—第i个基座铰支点在静坐标系中的坐标;Li—第i个移动副的长度。
由基座3个铰链的运动可知,3个铰链将支链的运动限制在3个平面内,其约束方程为:
(4)
由这3个约束条件,可以求得动平台的附加运动,即:
(5)
式中:CX—动平台中心点的X轴坐标;CY—动平台中心点的Y轴坐标;γ—动平台绕Z轴的旋转角度。
由此可以看出,动平台的运动只有3个独立参数,即绕X,Y轴的旋转角度和原点高度。
1.3 工作空间分析
3-RPS并联机构的工作空间,指末端执行件在驱动件和各关节的运动范围内能达到的位置。本文选择动平台的中心点位置集合表示海浪模拟器的工作空间,主要由移动副的行程和各关节的极限角度决定[9]:
(1)电动缸的行程为100 mm,初始长度为465 mm,所以移动副的有效长度为415 mm~515 mm;
(2)在移动副的有效长度内静平台铰链的运动角度不会超出允许角度,所以关节角度的限制由球铰的允许角度决定。在动平台某一位姿时球铰的角度即为动平台和电动缸杆的夹角,该夹角λ可以由动平台的法向量和电动缸的方向向量求得,即:
(6)
(7)
λ=arccos(nli)
(8)
式中:n—动平台的法向量;li—第i个移动副的方向向量。
工作空间的求解采用极限边界搜索法[10],即先将机构的输入参数离散,在指定范围内将α,β角和CZ随机取若干个值,得到若干组输入参数值;然后通过逆运动学分析,求得每组输入参数值对应的移动副长度和关节角度,判断是否满足允许值,若满足则该组输入对应的动平台中心点处于工作空间内,反之则在工作空间外。实际编程时,对CZ进行分层,在每层中求解α,β角度范围内工作空间的边界,将每层的边界组合起来,即得到总的工作空间。本研究中采用的球铰的允许角度为15°,在Matlab中编程求解工作空间。
工作空间Z轴截面如图2所示。

图2 工作空间Z轴截面图
从图2可以看出:看出海浪模拟器的工作空间在初始位置附近成柱形,由初始位置向两端收缩为锥形,整体工作空间关于3个约束平面对称,这也验证了前文逆运动学分析的结果。
2 控制系统设计
海浪模拟器的控制目的是使上平台跟随输入的α,β角和CZ曲线运动,即先根据输入的3个运动参数进行逆运动学分析,求解出3个驱动杆的长度,然后进行数据处理,获得3个电动缸的电机参数,控制电机实现动平台的位姿跟随输入曲线变化。
2.1 硬件组成
本文以CPAC为平台,开发海浪模拟器的控制系统,其控制核心为固高科技的GUS嵌入式多轴运动控制器。伺服电机作为被控对象,手持式示教器作为输入和显示设备,磁性接近开关、编码器和电子罗盘作为反馈设备,组成了完整控制系统。GUS嵌入式运动控制器集成了工业PC和运动控制处理器,系统处理器采用英特尔的CPU,运动控制处理器为DSP和FPGA芯片[11-13]。采用CPAC的平台,可简化控制系统结构和控制系统的开发流程,提高控制的精度。
控制系统硬件结构如图3所示。
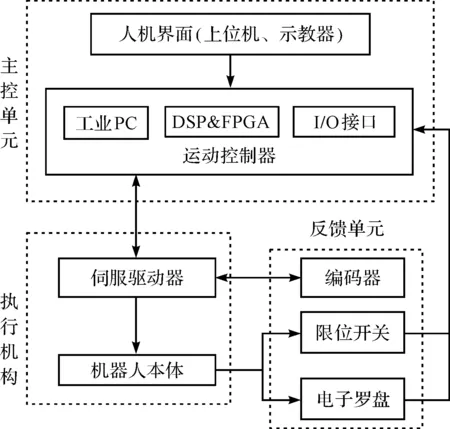
图3 控制系统硬件结构图
2.2 软件设计
系统软件使用CPAC平台中的Otostudio环境进行开发,在WinCE系统中运行。控制软件的结构分为人机界面、运动控制、运动学反解等5个主模块,实现海浪运动模拟、上平台手动调试等功能。其中,自动曲线跟随模块是实现海浪模拟的主要模块。
海浪模拟流程图如图4所示。
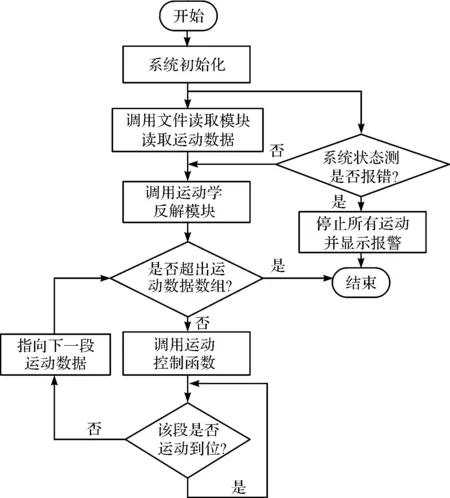
图4 海浪模拟流程图
图4中,先通过人工示教或者文件读取方式,获得动平台的位姿曲线,然后调用运动学反解模块,计算出3个电动缸的位置参数,最后调用运动模块,使动平台跟随输入曲线运动,并保存动平台实际位姿变化曲线。
3 海浪模拟实验及结果分析
3.1 海浪影响下的船舶运动
目前普遍采用皮尔逊-莫斯柯维奇谱(P-M谱)来描述海浪的运动。我国海洋局公布的半经验公式P-M谱为:
(9)
式中:ω—圆频率;U—平均风速。
根据海浪谱的输入和船舶运动的传递函数,即可求出船舶的运动谱,进而得到船舶的横摇、纵摇和垂荡运动样本[14]。
以船舶的横摇运动为例,平均风速U=10 m/s,时间长度为30 s,取得一个横摇运动样本,如图5所示。

图5 横摇运动样本
3.2 海浪模拟器实验结果及分析
本研究将船舶运动样本输入到控制系统中,模拟船舶横摇摆动,动平台绕X轴的角度由固定在动平台中心的电子罗盘得到。
动平台α角实际运动曲线与理想输入曲线的对比如图6所示。

图6 动平台角度输入曲线和实际曲线对比图
图6中:输入角度和输出角度的平均误差为0.36°,最大误差出现在18 s处,此时动平台速度达到最大值。实验结果表明,海浪模拟器能够很好地模拟锚定船舶在海浪中的运动。
4 结束语
本文研究了一种采用3-RPS并联机构的海浪模拟器,建立了三维模型,并推导了其运动学逆解,分析了其工作空间;开发了海浪模拟器控制系统,实现了船舶在海浪作用下的运动模拟;最后,求得了特定海浪环境下的一个船舶运动样本,并在模拟器上进行了实验。
实验结果表明,3-RPS并联海浪模拟器能准确模拟海浪环境。
