自主水下航行器机械臂系统非线性PD控制器设计
2020-03-06李小岗王红都
李小岗, 王红都, 黎 明
自主水下航行器机械臂系统非线性PD控制器设计
李小岗, 王红都, 黎 明
(中国海洋大学工程学院, 山东省海洋智能装备与仪器工程技术研究中心, 山东 青岛, 266100)
针对自主水下航行器机械臂系统(AUVMS)的非线性、高耦合性和工作环境的复杂性, 文中设计了基于线性扩张观测器(LESO)的控制方案。以带双连杆机械臂的自主水下航行器(AUV)为例, 将系统分为5个子系统, 将外部扰动(洋流、浪涌和涡流等干扰)与内部不确定性(建模不精确、耦合影响和测量误差等)视作总扰动, 并设计LESO和线性反馈控制律进行估计与补偿。对LESO的收敛性与估计误差动力学进行了分析。考虑到AUV动力装置所产生的动力和力矩是有限的, 在实际控制中需要对控制输入量针对动力装置的物理特性来设置上限, 并且少有文献对带机械臂系统的AUV饱和控制进行研究, 文中设计了具有输入饱和限制的非线性比例-微分(PD)控制器, 并对控制器的稳定性进行了分析。利用LESO的总扰动思想来处理AUV机械臂系统的非线性、高耦合性和复杂扰动的控制难点, 并以输入饱和控制器确保了控制方案的工业适用性。最后通过与传统PID与滑模控制器的对比分析及仿真验证了所提方案的有效性。
自主水下航行器机械臂系统; 线性扩张观测器; 非线性PD控制器; 输入饱和; 耦合系统
0 引言
随着陆地资源的短缺, 海洋资源的开发与利用越来越受到重视。但由于水下环境具有未知的危险性, 因此需要开发各项水下技术来代替人类对海洋资源进行勘探与开发。在这些技术中自主水下航行器机械臂系统(autonomous underwater vehicle manipulator system, AUVMS)发挥了很大的作用, 尤其在水下管道维修、钻孔、科研采样等方面[1-4]。
AUVMS具有高非线性、耦合性、工作环境复杂等特性, 这使得其控制变得非常复杂, 因此有必要针对AUVMS的特性设计控制器。经过多年发展, AUVMS的建模与控制方法已较为成熟, 例如Fossen[2]提出的基于牛顿-欧拉公式和Tarn等[3]提出的基于欧拉-拉格朗日公式的经典建模方法, 这2类建模方法为后来各类基于模型的控制方法提供了模型基础。在控制方面, 早期针对AUVMS的控制算法较为经典的有Yoerger等[5]将滑模控制算法应用于轨迹跟踪的问题。基于系统模型考虑运动补偿, Mahesh等[6]提出了水下航行器与机械臂之间的协调控制。随着水下控制任务越来越复杂和控制要求越来越高, 相关研究者们提出了一系列的新型控制方案[7-12]。例如, Londhe等[7]提出了一种类-比例-积分-微分(proportional-integral-derivative, PID)的模糊控制方案, 并引入干扰观测器对扰动实现前馈补偿; Dai等[8]在自适应控制的基础上提出了一种非直接的自适应控制, 并结合扩张卡尔曼滤波器建立扰动估计补偿系统; 基于模糊控制器, Xu等[12]提出了以神经网络进行分权控制的控制方案。这些控制方案都取得了较好的控制效果, 然而, 这些算法大多都是基于模型分析或者需要复杂的控制器建立和优化过程。
扩张观测器(extended state observer, ESO)由韩京清[13-15]提出, 其核心思想在于将内部不确定性与外部扰动综合为一个广义总扰动来处理, 并将总扰动项视作系统的一个扩张状态量, 由此建立观测器对系统状态量进行估计。ESO可以实时跟踪各类干扰, 由于总扰动的思想, 复杂的干扰项、无法预知的建模误差和参数未知性等均被视作一项来处理, 从而很大程度上化简了控制器的设计难度, 保证了其整体的鲁棒性[16]。但是由于ESO的核心函数是非线性的, 并且有大量参数需要调整, 这使得ESO在实际工业应用中受到了相对的限制。为了克服这些问题, Gao[17]从线性角度出发并结合带宽的概念提出了线性扩张观测器(linear ESO, LESO)。与ESO相比, LESO具有同样的扰动估计效果, 却只需要调节1个参数, 并且设计结构也相对简单, 在实际工业应用中也更容易实现。因此文中考虑用LESO对AUVMS的复杂外部干扰与内部不确定性进行估计处理。
在AUVMS的动力输入方面(如推进器和执行器等), 多数的控制算法并没有对其加以限制或者直接假设输入量总是能满足所设计控制器的要求。然而, 没有将输入约束直接纳入设计的控制系统设计方法存在很大的性能限制[18-20]。比如, 当控制器所要求的扭矩比执行器从典型的控制方法所能提供的扭矩要大, 则可能会导致运动退化或无法预测, 并导致机械过热或故障[21]。因此, 许多学者针对远程操控的船舶和自主水下航行器(autonomous underwater vehicle , AUV)提出了输入饱和的控制, 如Donaire等[22]基于port-Hamiltonian系统提出了近海船只动态定位控制的输入饱和控制方案来抑制未知常数扰动, 并确保了输入状态的稳定性; Sarhadi等[23]针对AUV的俯仰角和偏航角通道设计了具有输入限制的自适应积分反馈控制器; 在处理欠驱动AUV带有复合不确定性的空间曲线轨迹跟踪控制中, Miao等[24]采用自抗扰控制器来生成具有饱和限制的控制量, 很好地处理了动力学和运动学的未知性与复杂的外部干扰。这些文献在输入饱和控制方面都取得了一定成效, 但是针对输入限制的文献都集中于水下机器人和航行器的分析, 对带有机械臂系统的分析较少, 并且在处理饱和控制时常选用欠驱动的目标进行控制, 这在很大程度上限制了控制器在实际工程上的适用性。
基于以上分析, 文中针对AUVMS的复杂特性, 设计了LESO对其内部不确定性与外部干扰进行估计, 并设计前馈控制进行补偿。同时, 在考虑动力输入固有物理特性的基础上, 设计控制器时对控制输入加以限制, 设计了具有输入饱和特性的非线性比例-微分(proportional-derivative, PD)控制器, 并对其稳定性进行了分析。文中以带双连杆机械臂的AUV为例, 将整个系统拆分为5个子系统, 针对每个子系统分别设计非线性PD控制器和LESO, 通过仿真试验验证了所提控制方案的有效性。
1 AUVMS动力学模型
文中研究带双连杆机械臂的AUVMS, 并将AUVMS视为刚体, 根据Fossen[2, 25]的建模方法建立AUVMS在如下惯性坐标系中的二维平面动力学模型


式中: 向量= [,,,1,2]T由船体的位置[,]T, 偏航角和机械臂旋转角1,2组成;= [v, v,0,1,2]T, 其中, [v,v]T为机器人重心点在机身坐标系的移动速度, [0,1,2]T由偏航角切换速率0和机械臂关节角角速度1,2组成;()为系统的惯性矩阵, 包括附加惯性部分;(,)表示科氏力和向心力部分[26](包括附加惯性力部分);(,)表示水动力阻尼部分;()表示船体的浮力与重力之间的总和作用, 因为文中仅考虑-平面运动, 因此()=0;(,)表示系统中水下机器人与机械臂相对运动间的耦合影响与交互作用;为整个系统的控制输入;为难以测量的外部未知扰动;()为转移矩阵, 可以将惯性坐标系的状态量映射至机身坐标系[1]。AUVMS在-平面的运动示意图见图1。
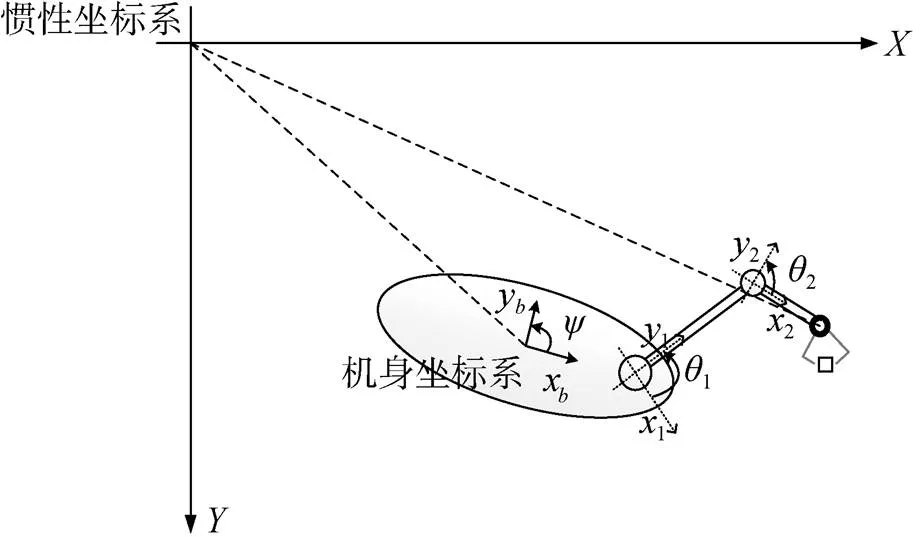
图1 自主水下航行器机械臂系统在X-Y平面运动示意图
对于模型(1), 有以下特性需要指出[4-5, 25]

在满足式(3)的限制条件下, 定义

至此, 根据总扰动思想, 并结合式(1)和式(4), AUVMS的动力学模型可以改写为

式中,为建模误差、参数不确定性、水动力阻尼项和未知干扰等的总和, 即

2 LESO设计与分析
首先将AUVMS分为5个子系统, 针对每个系统将耦合影响、建模误差和未知外部干扰等视为总扰动并设计LESO对其进行估计。以第1个子系统为例阐述了LESO的建立过程, 其余子系统的LESO可以根据同样的方法进行建立。
2.1 LESO设计
式(6)的展开矩阵形式为


定义
则子系统的系统模型可重新写作


式(13)的状态观测器可建立为
式(14)是在扩张状态变量的基础上建立的。式中,1,2,3为观测器增益, 可定义为[17]

式中,β,=1, 2, 3为多项式的3+12+2+3系数, 并使得此多项式Hurwitz, 也就是可以通过调整系数β使得多项式的特征值处于复平面的左半平面。为了简便计算, 可直接选择3+12+2+3= (+1)3, 则有

同时可求得

式中,ω1为第1个子系统的LESO的观测器带宽。
2.2 LESO估计误差分析
定义LESO的估计误差为
结合式(13)与式(14), 则误差的动态方程可写为

其中
定义式(19)的状态转移为[27]

改写为矩阵模式可得
式中:=[1,2,3]T;=[1,2,3]T;=diag[ω1-2,ω1-1,1]T。将式(22)代入式(19)可得
其中
根据式(16)中β,=1, 2, 3的取值有

式中,λ,=1, 2, 3为的特征值, 因此可使得系统满足Hurwitz条件。再由式(23)不难得出, 当ω1增大时, 总扰动项1的影响会随之减小, 且LESO的跟踪误差逐渐减小。
对LESO的稳态误差进行分析。将式(15)和式(16)代入式(14), 可得

结合LESO估计误差式(18)与式(26), 进行Laplace变换可得
假设输入1与1有界, 则LESO的稳态误差可表示为
由式(28)可以看出LESO的稳态误差趋于0。
3 非线性PD控制器设计
考虑AUVMS的动力输入物理限制情况, 文中设计带有输入饱和的非线性PD控制器。
同样以第1个子系统为例, 设计反馈控制率进行扰动补偿

式中:3为第1个子系统的LESO对第1个子系统的总扰动项1的估计;0为待设计的控制器。
将式(29)代入式(12)可得

LESO足够精准地跟踪总扰动项的前提下,有

式中:为跟踪误差向量;为LESO对输出的跟踪;为期望输出。不难验证

式中, ln(.)和cosh(.)分别代表标准自然对数函数与双曲余弦函数。
则第1个子系统的控制器可选取为

式中:k,k≥1, 用于调整tanh(.)的激增锐度;k,k为比例微分参数。在系统控制量有限制的条件下直接对p,k进行调整, 即可达到输入限制的效果, 如控制输入量上限为0max, 则有
稳定性证明:
假设系统初试状态[,]T=0, 将式(35)代入式(31), 可得

定义Lyapunov函数
对式(38)求微分可得


证毕。
通过分析第2章和第3章对LESO和非线性PD控制器的设计方法, 可以以同样的方式建立其他子系统的LESO与非线性PD控制器。完整的基于LESO的非线性PD控制结构如图2所示。
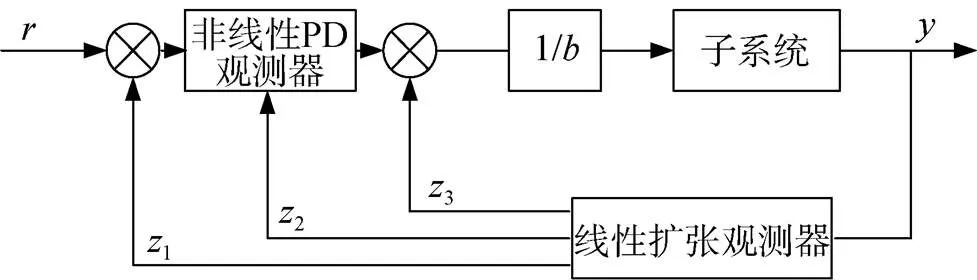
图2 基于线性扩张观测器的非线性比例-微分控制结构
4 仿真试验与分析
试验中的扰动采用洋流的近似动力学方程
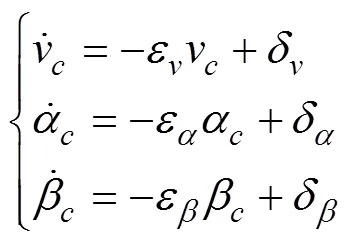
式中:v为水下洋流速度;α和为洋流方向;δ,δ和δ为高斯白噪声用以模拟洋流的不确定性;ε,ε和ε为较小的可调正数。
带饱和特性的非线性PD控制器的饱和界限可以由各自的参数k和k决定, 在试验中5个控制量的上限分别设定为200, 即有

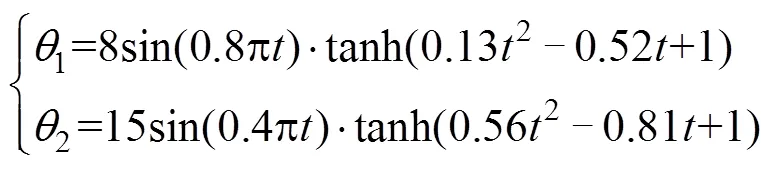
仿真中机械臂关节角度的变化轨迹设定为
为了验证所提出控制方案的有效性, 将其控制效果与传统滑模控制(sliding molding control, SMC)和PID控制进行了对比。其中SMC和PID分别设定为
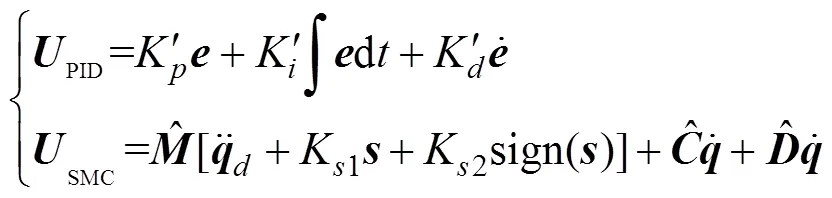

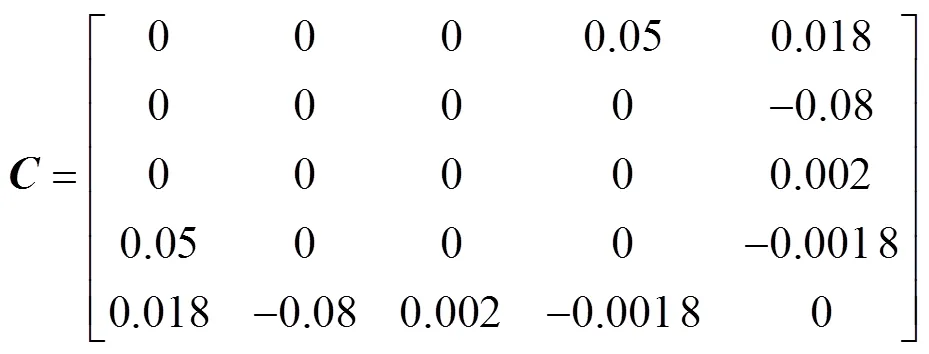
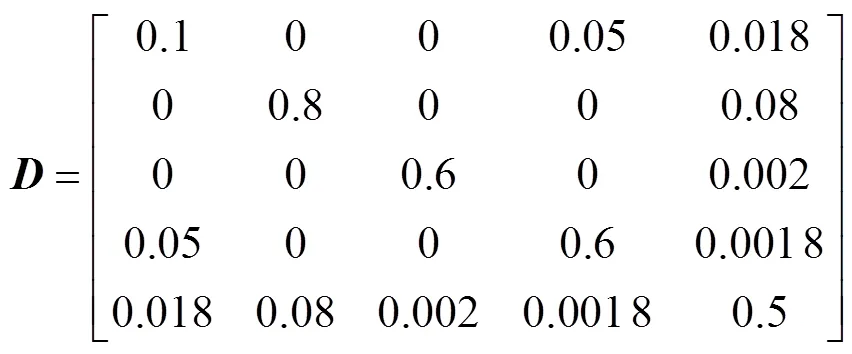




图3 AUVMS轨迹跟踪结果

图4 机械臂关节角度变化轨迹跟踪误差

图5 LESO对各个子系统的总扰动估计误差
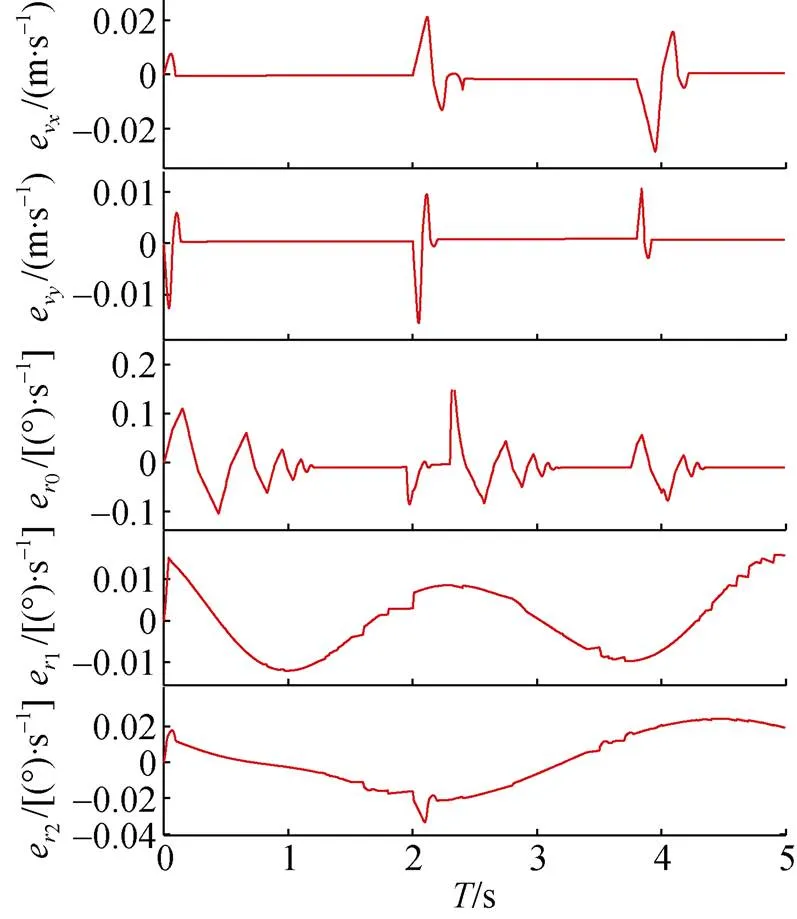
图6 LESO对输出的1阶导数跟踪误差

图7 3类控制器控制输出对比
5 结束语
针对AUVMS, 基于LESO提出了带饱和特性的非线性PD控制器, 将AUVMS拆分为5个子系统, 分别设计控制器。每个子系统的控制方案都将洋流、建模误差和其他干扰项视为总扰动, 由LESO进行估计并设计前馈补偿, 减少了控制算法设计的复杂性。考虑到实际系统的物理特性, 针对AUV及其机械臂系统均设计了带饱和特性的非线性PD控制器。仿真结果显示, 与传统SMC和PID相比, 所提出的控制器具有更好的控制效果, 饱和特性的设计也保证了工程应用的有效性。文中所提的控制方案可以引申至带有更多机械臂和更多自由度的AUVMS。在下一步工作中, 所提控制方案可以考虑实现参数在线自调整来提高工程应用的时效性。
[1] Londhe P S, Santhakumar M, Patre B M, et al. Task Space Control of an Autonomous Underwater Vehicle Manipulator System by Robust Single-Input Fuzzy Logic Control Scheme[J]. IEEE Journal of Oceanic Engineering, 2017, 42(1): 13-28.
[2] Fossen T I. Guidance and Control of Ocean Vehicles[M]. New Jersey: John Wiley& Sons Ltd, 1994.
[3] Tarn T J, Shoults G A, Yang S P. A Dynamic Model of an Underwater Vehicle with a Robotic Manipulator Using Kane’s Method[J]. Autonomous Robots, 1996, 3(2-3): 269-283.
[4] Li X G, Wang H D, Li Ming, et al. Linear Active Disturbance Rejection Controller Design for Underwater Vehicle Manipulators with 2-links[C]//2018 Chinese Automation Congress(CAC) 2018. Xi’an,China: IEEE, 2018: 875-880.
[5] Yoerger D R, Slotine J. Robust Trajectory Control of Underwater Vehicles[J]. IEEE Journal of Oceanic Engineering, 1985, 10(4): 462-470.
[6] Mahesh H, Yuh J, Lakshmi R. A Coordinated Control of an Underwater Vehicle and Robotic Manipulator[J]. Journal of Field Robotics, 1990, 8(3): 339-370.
[7] Londhe P S, Santhakumar M, Patre B M, et al. Robust Task-space Control of an Autonomous Underwater Vehicle-manipulator System by PID-like Fuzzy Control Scheme with Disturbance Estimator[J]. Ocean Engineering, 2017, 139: 1-13.
[8] Dai Y, Yu S. Design of an Indirect Adaptive Controller for the Trajectory Tracking of UVMS[J]. Ocean Engineering, 2018, 151: 234-245.
[9] Yatoh T, Sagara S, Tamura M. Digital Type Disturbance Compensation Control of a Floating Underwater Robot with 2 link Manipulator[J]. Artificial Life and Robotics, 2008, 13(1): 377-381.
[10] Wang Y, Jiang S, Chen B, et al. Trajectory Tracking Control of Underwater Vehicle-Manipulator System Using Discrete Time Delay Estimation[J]. IEEE Access, 2017, 5(99): 7435-7443.
[11] Huang H, Tang Q, Li H, et al. Vehicle-manipulator System Dynamic Modeling and Control for Underwater Autonomous Manipulation[J]. Multibody System Dynamics, 2017, 41(2): 125-147.
[12] Xu B, Pandian S R, Sakagami N, et al. Neuro-fuzzy Control of Underwater Vehicle-manipulator Systems[J]. Journal of the Franklin Institute, 2012, 349(3): 1125-1138.
[13] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23.Han Jing-qing. Active Disturbance Rejection Controller and Application[J]. Control and Decision, 1988, 13(1): 19-23.
[14] 韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1): 85-88.Han Jing-qing. Extended State Observer for an Uncertain System[J]. Control and Decision, 1995, 10(1): 85-88.
[15] Han J Q. From PID to Active Disturbance Rejection Control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[16] Feng H, Guo B Z. A New Active Disturbance Rejection Control to Output Feedback Stabilization for a One- Dimensional Anti-Stable Wave Equation with Disturbance[J]. IEEE Transactions on Automatic Control, 2016, 62(8): 3774-3778.
[17] Gao Z. Scaling and Bandwidth-parameterization Based Controller Tuning[C]//American Control Conference, 2003. Proceedings of the 2003. Denver, CO, USA: IEEE, 2003: 4989-4996.
[18] Fischer N, Kan Z, Kamalapurkar R, et al. Saturated RISE Feedback Control for a Class of Second-Order Nonlinear Systems[J]. IEEE Transactions on Automatic Control, 2014, 59(4): 1094-1099.
[19] Bernstein D S, Michel A N. A Chronological Bibliography on Saturating Actuators[J]. Int. j. robust & Nonlinear Control, 2010, 5(5): 375-380.
[20] Sun N, Fang Y, Zhang X. Energy Coupling Output Feedback Control of 4-DOF Underactuated Cranes with Saturated Inputs[J]. Automatica, 2013, 49(5): 1318-1325.
[21] Dixon W E. Adaptive Regulation of Amplitude Limited Robot Manipulators with Uncertain Kinematics and Dynamics[J]. IEEE Transactions on Automatic Control, 2007, 52(3): 488-493.
[22] Donaire A, Perez T. Dynamic Positioning of Marine Craft Using a Port-Hamiltonian Framework[J]. Automatica, 2012, 48(5): 851-856.
[23] Sarhadi P, Noei A R, Khosravi A. Adaptive Integral Feedback Controller for Pitch and Yaw Channels of an AUV with Actuator Saturations[J]. ISA Transactions, 2016, 65: 284-295.
[24] Miao J M, Wang S P, Lei F, et al. Spatial Curvilinear Path Following Control of Underactuated AUV[J]. ISA Transactions, 2017, 67: 107-130.
[25] Mohan S, Kim J. Coordinated Motion Control in Task Space of an Autonomous Underwater Vehicle Manipulator System[J]. Ocean Engineering, 2015, 104: 155-167.
[26] Juan Ignacio Mulero-MartÍnez. Uniform Bounds of the Coriolis/Centripetal Matrix of Serial Robot Manipulators[J]. IEEE Transactions on Robotics, 2007, 23(5): 1083-1089.
[27] Shao S, Gao Z. On the Conditions of Exponential Stability in Active Disturbance Rejection Control Based on Singular Perturbation Analysis[J]. International Journal of Control, 2016, 90(10): 1-21.
Nonlinear PD Controller Design for Autonomous Undersea Vehicle-Manipulator System
LI Xiao-gang, WANG Hong-du, LI Ming
(Ocean University of China, Key Laboratory of Marine Mechanical and Electrical Equipment & Instruments of Shandong Provincial Universities, Qingdao 266100, China)
For dealing with the nonlinearity, strong coupling and complexity of the working environment of autonomous undersea vehicle-manipulator system(AUVMS), a linear extended state observer(LESO)-based control scheme is designed, in which an AUV with two-link manipulator is divided into 5 subsystems. In each subsystem, external disturbances(such as ocean current, surge and vortex) and internal uncertainties(imprecise modeling, coupling effect and measurement error) are lumped as total disturbances, and LESO and linear feedback control law are designed for estimation and compensation, respectively. The convergence of LESO and the dynamics of estimation error are analyzed. Considering that the power and torque generated by the power device of undersea vehicle are limited, the upper limit of the control input should be set according to the physical characteristics of the power device in practical circumstance, however few literatures have studied the saturation control of undersea vehicle with manipulator system. Therefore, a nonlinear proportional-derivative(PD) controller with input saturation limit is designed and its stability is analyzed. The nonlinearity, high coupling and complex disturbance of the AUVMS are dealt with by using the “total disturbance” concept of the LESO, and the input saturation controller is adopted to ensure the industrial applicability of the control scheme. In addition, the effectiveness of the proposed control algorithm is verified by simulation and comparison with traditional proportional-integral-derivative(PID) control and slide mode control.
autonomous undersea vehicle-manipulator system(AUVMS); linear extended state observer(LESO); nonlinear proportional-derivative(PD) controller; input saturation; coupling system
相关文章导航
1. 宋书龙, 吕瑞, 周景军, 等. 基于主动倾斜转弯的超空泡航行器机动控制方法[J]. 水下无人系统学报, 2019, 27(6).
2. 李鑫, 黄茹楠, 丁宁. 输入受限的自主水下航行器自适应反演控制[J]. 水下无人系统学报, 2019, 27(6).
3. 张明明, 刘维亭, 魏海峰, 等. 基于滑模观测器的PMSM单相霍尔位置传感器故障容错控制算法[J]. 水下无人系统学报, 2019, 27(6).
4. 朱红秀, 杜闯, 褚彦斌, 等. 一种电磁驱动机器鱼避障方法[J]. 水下无人系统学报, 2019, 27(6).
5. 王冠琳, 王岩峰, 官晟. 水下滑翔机数据管理[J]. 水下无人系统学报, 2019, 27(5).
6. 桑宏强, 于佩元, 孙秀军. 基于航向补偿的水下滑翔机路径跟踪控制方法[J]. 水下无人系统学报, 2019, 27(5).
7. 张安通, 徐令令, 王健, 等. 一种UUV智能应急安全控制自救系统设计[J]. 水下无人系统学报, 2019, 27(5).
8. 曹浩, 张伟伟, 文立华, 等. 鱼雷动力系统振动控制技术及应用研究[J]. 水下无人系统学报, 2019, 27(5).
9. 刘来连, 闵强利, 张光明. “海鲟4000”水下滑翔机水动力特性与滑翔性能研究[J]. 水下无人系统学报, 2019, 27(5).
10.刘伟, 范辉, 吕建国, 等. 超高速水下航行器控制方法研究热点综述[J]. 水下无人系统学报, 2019, 27(4).
11. 李杰, 马徐琨. 远程投送水下航行器自主航行安全性策略设计方法[J]. 水下无人系统学报, 2019, 27(4).
TJ630.33; TP241
A
2096-3920(2020)01-0024-09
10.11993/j.issn.2096-3920.2020.01.004
李小岗, 王红都, 黎明. 自主水下航行器机械臂系统非线性PD控制器设计[J]. 水下无人系统学报, 2020, 28(1): 24-32.
2019-05-16;
2019-06-05.
国家自然科学基金(61603361); 中央高校基本科研业务费专项(201964012); 河南省水下智能装备重点实验室开放基金(KL02A1802).
李小岗(1993-), 男, 在读硕士, 主要研究方向为抗干扰控制、水下航行器运动控制.
(责任编辑: 许 妍)
