基于三自由度动态内模解耦的PMSM弱磁控制
2020-03-06尤钱亮魏海峰田会峰
尤钱亮, 魏海峰, 常 徐, 田会峰
基于三自由度动态内模解耦的PMSM弱磁控制
尤钱亮1,2, 魏海峰1,2, 常 徐1,2, 田会峰1,2
(1. 江苏科技大学电子信息学院, 江苏 镇江, 212003; 2. 苏州东大金点物联科技有限公司, 江苏 张家港, 215000)
针对水下航行器推进系统中永磁同步电机(PMSM)在弱磁区电动工况下动态性能不理想的问题, 依据PMSM弱磁理论, 研究了交直轴电流调节器对弱磁控制动态性能的影响, 提出基于三自由度动态内模解耦的PMSM弱磁控制策略。考虑到传统内模解耦无法同时兼顾解耦效果、响应速度及稳态误差,引入电流调节因子, 对解耦控制器进行改进。在此基础上,针对输出转矩发生阶跃时交轴电流调节方向与系统期望方向相反的问题, 在电流调节因子中加入交轴电流信息, 结合模糊控制器, 实时对电流调节因子进行优化。仿真和试验结果表明, 该策略综合解决了弱磁区电动工况下交轴电流调节器调节不利和电流耦合严重的问题, 改善了PMSM的动态性能, 同时具有抗饱和、电流解耦及弱磁控制的三重功能。
水下航行器推进系统; 永磁同步电机; 弱磁控制; 动态性能; 三自由度动态内模解耦; 抗饱和
0 引言
推进电机是水下航行器的重要组成部分, 然而水下航行器空间有限、运行情况复杂, 选用空间占用小、响应速度快、节能高效的推进电机对水下航行器具有重要意义[1]。永磁同步电机(per- manent magnet synchronous motor, PMSM)具有体积小、效率高、转矩输出能力好等优点, 满足了水下航行器推进电机的要求[2]。由于采用永磁体励磁, 无法通过励磁绕组调节励磁磁场, PMSM必须采用弱磁控制技术以满足宽转速范围的调速需求。在不增加电压源逆变器(voltage source in- verter, VSI)容量的情况下, 弱磁控制可以帮助实现PMSM在高速情况下的恒功率输出, 并拓宽其调速范围。因此, 有必要研究高性能的PMSM弱磁控制策略。
自20世纪80年代中期, 学者们一直致力于弱磁控制策略的研究, 以期在保证电机工作效率的基础上, 不断扩大其调速范围, 提高其调速性能[3-4]。文献[5]提出一种修正电流设定值的弱磁控制策略, 通过梯度下降法计算出电流调节器输出电压的递减方向信息, 根据电压设定值与电流调节器输出电压的差值和电压、转矩变化量的方向信息设定电流修正值, 具有良好的动态性能, 但其计算量大, 参数鲁棒性差; 文献[6]和[7]用前馈磁链减去反馈磁链对系统进行弱磁控制, 其中前馈磁链通过查表获得, 反馈磁链由过调制模块输入电压和输出电压的差值计算而得, 一定程度上优化了系统动态性能, 但电压偏差转换为反馈磁链的增益确定及表格数据均需通过大量试验获得; 文献[8]和[9]利用VSI输出电压的极限值和直()轴电压计算得到最佳交轴电压指令, 使得电机工作点指令始终位于恒转矩曲线和当前转速对应的电压极限椭圆的交点, 该方法提高了系统电压利用率, 但稳态性能不佳; 文献[10]和[11]在单电流弱磁控制的基础上, 以使电机在输出转矩不变的情况下工作电流达到最小值为目的, 利用梯度下降法在线修正交轴电压给定值, 系统工作效率明显提升, 但参数鲁棒性不强; 文献[12]在基于电压反馈的弱磁控制策略基础上, 将VSI所能输出的最大电压和交直()轴电流调节器输出的电压指令作差, 利用电压调节器对其进行调节, 从而获得直轴电流期望值, 系统稳态性能和鲁棒性得到提升, 但瞬态响应性能不理想。
弱磁工况下, PMSM的动态和稳态性能取决于交直轴电流跟随指令的程度。当VSI和电流调节器的输出存有裕量时, 系统电流可较好地跟随指令, 当两者出现饱和时, 实际电流与指令间会出现较大误差。因此, 只有抑制VSI和电流调节器的饱和, 提高电流跟随性能, 才能提高PMSM的弱磁性能。
文中分析了PMSM在弱磁区电动工况下动态性能不佳的原因, 以基于电压反馈的弱磁控制策略为基础, 提出基于三自由度动态内模解耦的PMSM弱磁控制策略。针对传统内模解耦无法兼顾解耦效果和电流调节器性能的问题, 在传统内模解耦的基础上引入2个电流调节因子; 考虑到弱磁区电动工况下PMSM输出转矩阶跃时交()轴电流调节不利的问题, 在电流调节因子中加入交轴电流信息, 从源头削弱其对系统的影响; 结合模糊控制器, 利用VSI实际输出电压和电压指令的误差, 实时优化电流调节因子; 最后通过仿真试验, 对该策略及基于电压反馈的弱磁控制策略进行对比分析。
1 PMSM弱磁控制理论
PMSM以VSI供电, 其主电路拓扑如图1所示。构建PMSM数学模型[13], 其交直轴电压方程为

图1 永磁同步电机分析模型
忽略定子电阻, 其稳态电压方程为
输出的电磁转矩为


PMSM的运行会受到VSI输出能力的限制, 主要分为以下2个方面。

把式(2)代入式(4), 可将对电压的限制转化为对电流的限制, 即

在实际工程中, 常用如图3所示的基于电压反馈的弱磁控制策略来实现i的负向增加。其中, 为防止电压限制椭圆和电流限制圆无交点引起电流失控, 对i进行了限幅[14]。
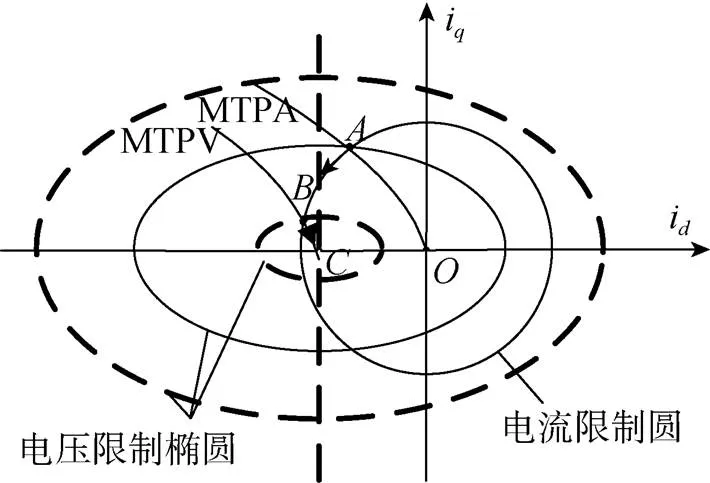
图2 PMSM电流及电压约束
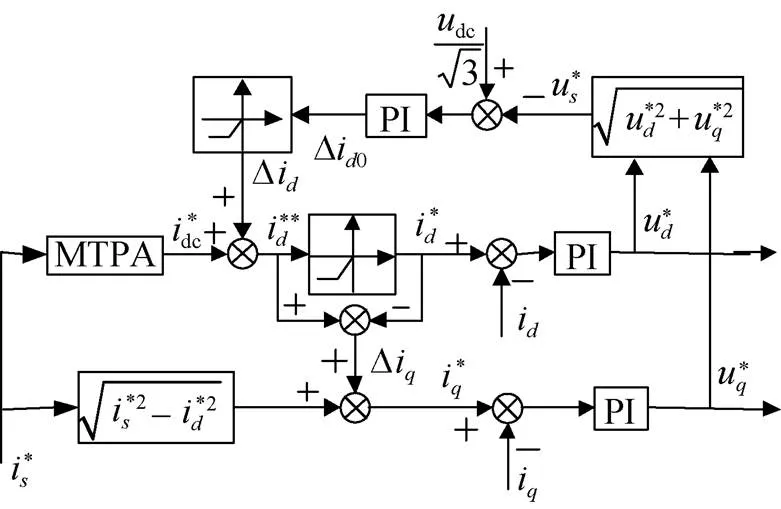
图3 基于电压反馈的弱磁控制策略框图
2 改进PMSM弱磁性能的控制策略
2.1 弱磁工况下动态性能不佳的原因


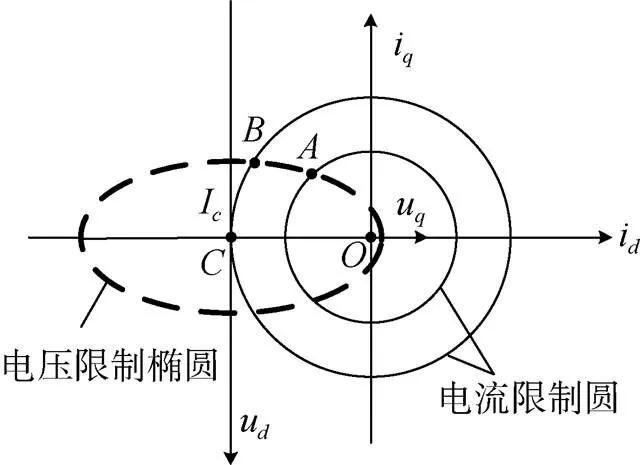
图4 转矩发生突变时电流理想轨迹


2.2 弱磁控制策略的提出
内模控制(internal model control, IMC)是一种对参数变化不敏感的鲁棒控制方法, 作为一种先进的控制策略被广泛应用于PMSM电流解耦, 可以较好地抑制PMSM参数估计误差。

式中, I为2阶单位矩阵。
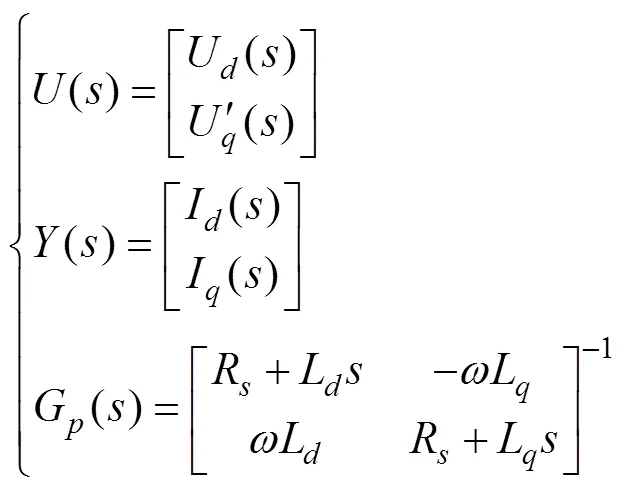
分析PMSM传递函数的零极点分布, 可知其右半平面无零点, 且其机电时间常数比电磁时间常数大得多。所以, 在高频情况下可将电流环近似看作1阶系统。为提高性能, 根据IMC原理, 取低通滤波器

根据式(7)~式(10), 得到
结合上述分析, 得到如图6所示的PMSM内模解耦控制框图。

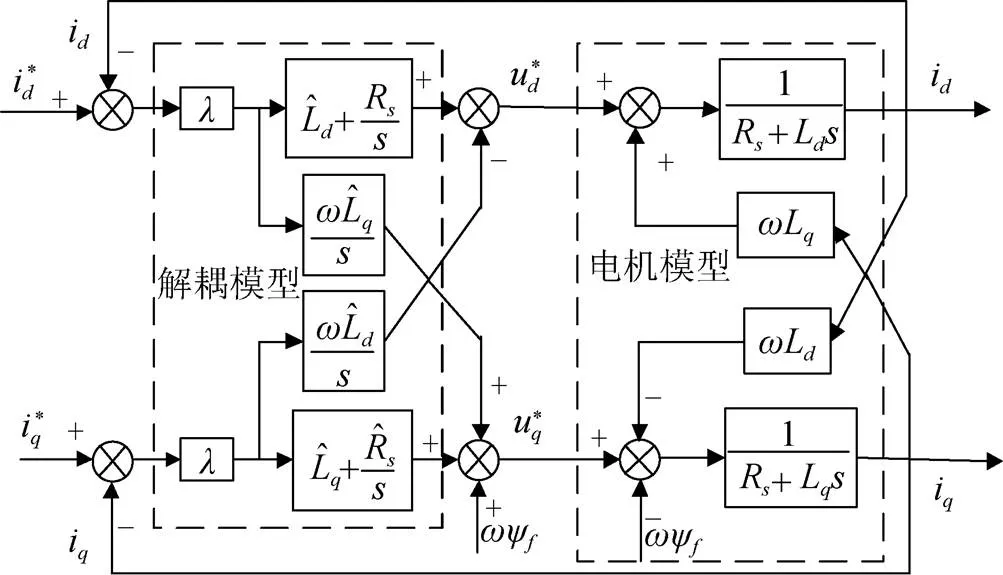
图6 PMSM内模解耦控制框图

根据专家经验及试验分析将模糊推理系统中输入和输出各变量的模糊集、论域及隶属度函数定义如下:
2) 输入的论域选取为[–3, 3], 输出的论域选取为[–3, 3];
3) 输入的隶属度函数均为高斯型, 输出的隶属度函数为三角型。

表1 积分调节因子修正值的模糊控制规则表

表2 电流调节因子修正值的模糊控制规则表
结合图4, 对式(15)分析可知, 在PMSM弱磁恒速工况下, 转矩指令发生阶跃时, 期望电流和发生突变, 的变化方向仍与系统需求一致, 电流调节因子的分母则直接减缓了的变化率, 从源头有效抑制调节器饱和, 从而减轻了交轴电流调节器的负担, 加快了电流动态响应。
3 仿真分析与试验验证
在PMSM交流调速平台上, 对弱磁控制策略在电动工况下的控制性能进行了仿真分析和试验验证, PMSM的参数如表3所示。
3.1 仿真分析
图8是PMSM在6 000 r/min的转速下, 转矩在0~58 N·m间阶跃时的电流响应波形。


表3 电机参数
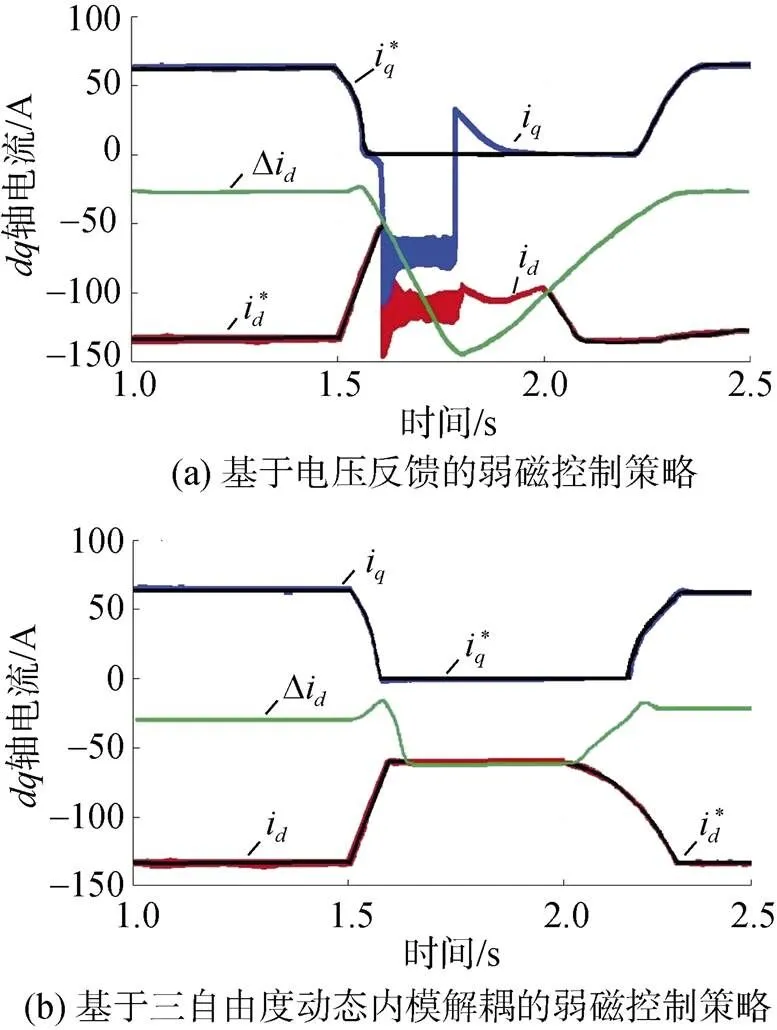
图8 转速6 000 r/min转矩突变时电流响应
3.2 试验验证
试验平台如图9所示。

图9 试验平台
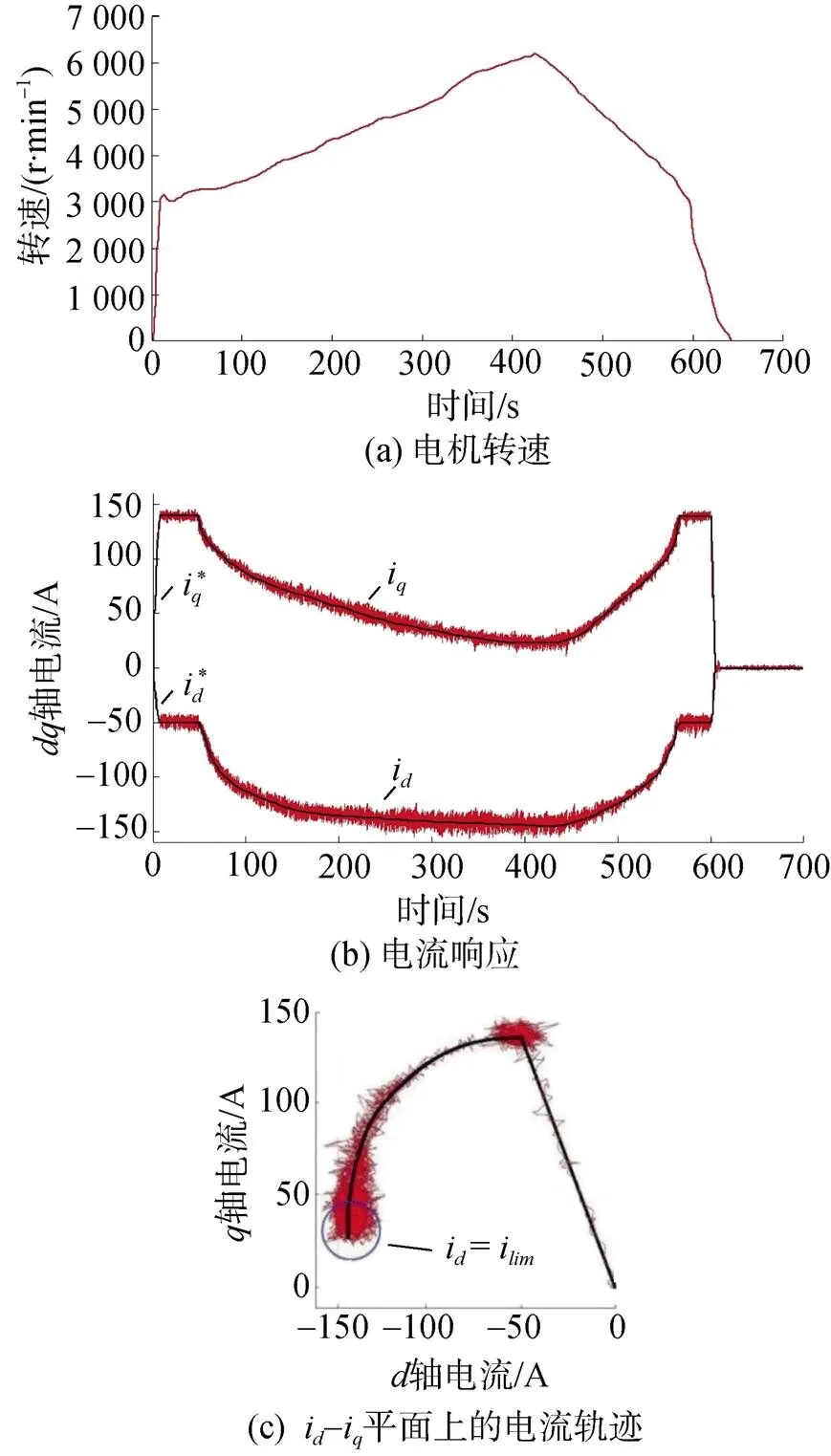
图10 基于电压反馈的弱磁控制策略电流响应曲线
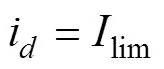
整个过程中, 2种弱磁控制策略下的交直轴电流均能跟随电流指令, 且相同转速下的交直轴输出电流相等, 故在弱磁扩速性能及转矩输出性能上, 提出的弱磁控制策略与基于电压反馈的弱磁控制策略相当。对比图10和图11的电流波形可以看出, 弱磁控制策略下的电流脉动较小, 电流控制效果明显提高。故在电流跟随性能上, 弱磁控制策略优于基于电压反馈的弱磁控制策略。
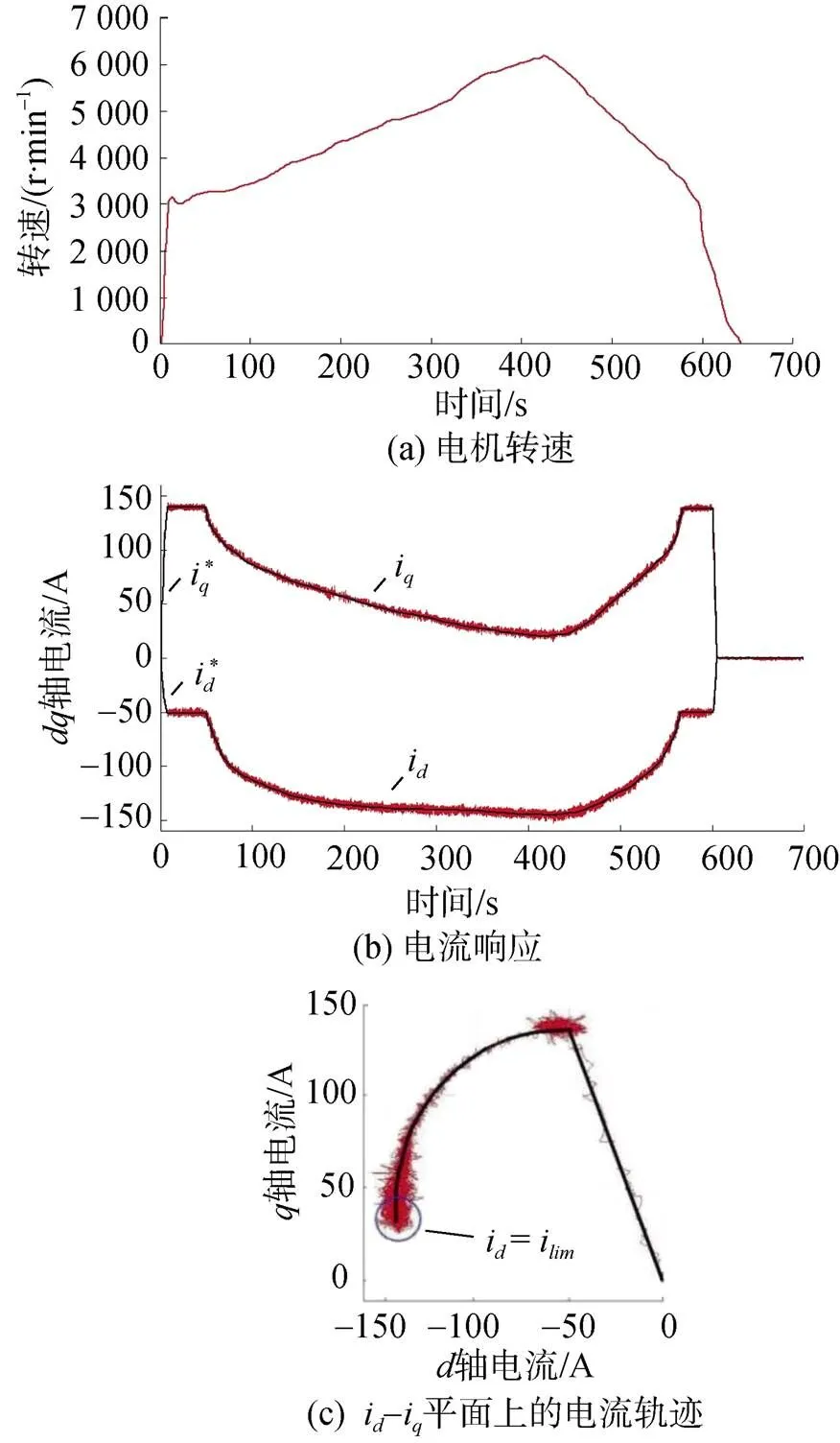
图11 基于三自由度动态内模解耦的弱磁控制策略电流响应曲线

图12 转速4 500 r/min转矩突变时的转速、电流和电压响应曲线
4 结束语
文中研究了PMSM在电动弱磁工况下动态性能不佳的根本原因: 负载转矩突变时, 交轴电流调节器控制作用与系统需求相反, 电流耦合进一步恶化电流跟随性能。同时提出了一种基于三自由度动态内模解耦的弱磁控制策略, 综合解决了交轴电流调节器调节不利和交直轴电流耦合严重的问题, 加强电流跟随, 消除了PMSM在电动工况下弱磁区动态过程中的电流振荡, 提高了PMSM动态性能。该策略能有效抑制电流调节器和VSI的饱和问题, 稳态性能良好, 具有基于电压反馈弱磁控制策略的弱磁扩速性能和转矩输出能力。
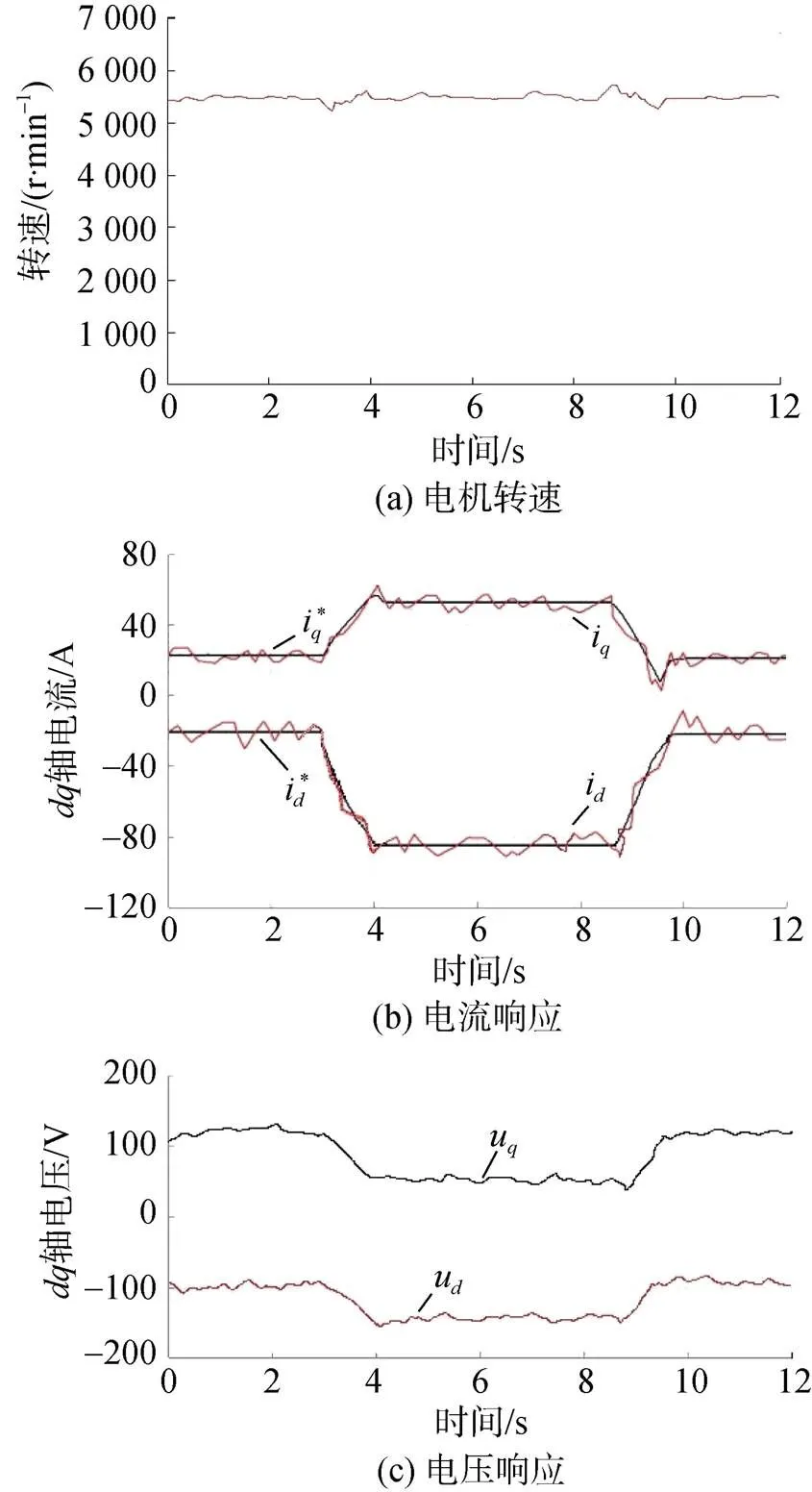
图13 转速5 500 r/min转矩突变时的转速、电流和电压响应曲线
[1] 徐海珠, 谢顺依, 崔维开. 基于脉震高频电压注入的对转永磁同步电机无位置传感器控制[J]. 鱼雷技术, 2012, 20(4): 290-294. Xu Hai-zhu, Xie Shun-yi, Cui Wei-kai. Position-senseless Control of a Rotating Permanent Magnet Synchronous Motor Based on Pulsating High-frequency Voltage Injection[J]. Torpedo Technology, 2012, 20(4): 290-294.
[2] 陈坤华, 孙玉坤, 吉敬华, 等. 内嵌式永磁同步电动机弱磁控制分段线性化研究[J]. 电工技术学报, 2015, 30 (24): 17-22. Chen Kun-hua, Sun Yu-kun, Ji Jing-hua, et al. The Piece-Wise Linearization Research of Interior Permanent Magnet Synchronous Motors Field-Weakening Control[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 17-22.
[3] Sneyers B, Novotny D W, Lipo T A. Field Weakening in Buried Permanent Magnet ac Motor Drives[J]. IEEE Transactions on Industry Applications, 1985, 21(2): 398-407.
[4] Jahns T M, Kliman G B, Neumann T W. Interior Permanent-magnet Synchronous Motors for Adjustable-speed Drives[J]. IEEE Transactions on Industry Applications, 1986, 22(4): 738-747.
[5] 唐朝晖, 丁强, 喻寿益, 等. 内埋式永磁同步电机的弱磁控制策略[J]. 电机与控制学报, 2010, 14(5): 68-72. Tang Zhao-hui, Ding Qiang, Yu Shou-yi, et al. Research of Flux Weakening Strategy of Interior Permanent Magnet Synchronous Motor[J]. Electric Machines and Control, 2010, 14(5): 68-72.
[6] Kwon T S, Choi G Y, Kwak M S, et al. Novel Flux-wea- kening Control of an IPMSM for Quasi-six-operation[J]. IEEE Transactions on Industry Applications, 2008, 44(6): 1722-1731.
[7] Yoo A, Sul S K, Kim H, et al. Flux-weakening Strategy of an Induction Machine Driven by an Induction Machine Driven by an Electrolytic Capacitor-less Inverter[J]. IEEE Transactions on Industry Applications, 2011, 47(3): 1328- 1336.
[8] 方晓春, 胡太元, 林飞, 等. 基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J]. 电工技术学报, 2015, 30(2): 140-147. Fang Xiao-chun, Hu Tai-yuan, Lin Fei, et al. Single Current Regulator Flux-Weakening Control of PMSM Based on Current Cross-Coupling Effect[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 140-147.
[9] 李华, 方晓春, 林飞, 等. 异步牵引电机方波单电流闭环控制策略及其参数鲁棒性分析[J]. 电工技术学报, 2018, 33(9): 2034-2043. Li Hua, Fang Xiao-chun, Lin Fei, et al. Singles Current Loop Control Strategy of Induction Traction Motor in Square Wave Mode and Its Parameter Robustness Analysis[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 2034-2043.
[10] 李珂, 顾欣, 刘旭东, 等. 基于梯度下降法的永磁同步电机单电流弱磁优化控制[J]. 电工技术学报, 2016, 31(15): 8-15. Li Ke, Gu Xin, Liu Xu-dong, et al. Optimized Flux Weakening Control of IPMSM Based on Gradient Descent Method with Single Current Regulator[J]. Transactions of China Electrotechnical Society, 2016, 31(15): 8-15.
[11] 盛义发, 喻寿益, 桂卫华, 等. 轨道车辆用永磁同步电机系统弱磁控制策略[J]. 中国电机工程学报, 2010, 30 (9): 74-79. Sheng Yi-fa, Yu Shou-yi, Gui Wei-hua, et al. Field Weakening Operation Control Strategies of Permanent Magnet Synchronous Motor for Railway Vehicles[J]. Proceedings of CSEE, 2010, 30(9): 74-79.
[12] Tursini M, Chiricozzi E, Petrella R. Feedforward Flux-weakening Control of Surface-mounted Permanent- magnet Synchronous Motors Accounting for Resistive Voltage Drop[J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 440-448.
[13] 何亚屏, 文宇良, 许峻峰, 等. 基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略[J]. 电工技术学报, 2012, 27(3): 92-99. He Ya-ping, Wen Yu-liang, Xu Jun-feng, et al. High- Power Permanent Magnet Fiux-Weakening Strategy Based on Multi-Mode SVPWM[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 92-99.
[14] 朱磊, 温旭辉, 赵峰. 永磁同步电机弱磁失控机制及其应对策略研究[J]. 中国电机工程学报, 2011, 31(18): 67-72. Zhu Lei, Wen Xu-hui, Zhao Feng. Control Policies to Prevent PMSMs from Losing Control under Field-weakening[J]. Proceedings of the Chinese Society for Electrical Engineering, 2011, 31(18): 67-72.
[15] 朱希荣, 伍小杰, 周渊深. 基于内模控制的永磁同步电机变频调速系统的研究[J]. 电气传动, 2007, 37(12): 46-48.Zhu Xi-rong, Wu Xiao-jie, Zhou Yuan-shen. Research on IMC-based Variable Frequency Drive System of Synchronous Motor[J]. Electric Transmission, 2007, 37(12): 46-48.
[16] 孟钊, 李好文, 孙朋朋. 永磁同步电机电流环改进内模解耦控制的研究[J]. 电气传动, 2016, 46(2): 11-15, 30. Meng Zhao, Li Hao-wen, Sun Peng-peng. Research on the Improved Internal Model Decoupling Control of Current Loop for Permanent Magnet Synchronous Motor[J]. Electric Drive, 2016, 46(2): 11-15, 30.
[17] 刘慧博, 王静, 吴彦合. 无刷直流电机模糊自适应PID控制研究与仿真[J]. 控制工程, 2014, 21(4): 583-587. Liu Hui-bo, Wang Jing, Wu Yan-he. Study and Simulation of Fuzzy Adaptive PID Control of Brushless DC Motor[J]. Control Engineering of China, 2014, 21(4): 583-587.
Flux-Weakening Control of PMSM Based on Three-Degree-of-Freedom Dynamic Internal Model Decoupling
YOU Qian-liang1,2, WEI Hai-feng1,2, CHANG Xu1,2, TIAN Hui-feng1,2
(1. Jiangsu University of Science and Technology Zhenjiang 212003 China; 2. SuZhou Dongda Goldenpoint Technology Co., Ltd, Zhangjiagang 215000, China)
Aiming at the problem that the dynamic performance of permanent magnet synchronous motor(PMSM) of undersea vehicle propulsion system in flux-weakening operation is unsatisfactory, the influence of direct-quadrature axis current regulator on the dynamic performance of PMSM is studied based on the PMSM flux-weakening theory, and a flux-weakening control strategy of PMSM based on three-degree-of-freedom dynamic internal model decoupling is proposed. Considering the fact that traditional internal model decoupling cannot take the decoupling effect, response speed and steady-state error into account at the same time, current regulation factors are introduced to modify the decoupling controller. On this basis, to the problem that the direction of quadrature axis current regulation is opposite to the expected direction of the system when the output torque leaps, the information of quadrature axis current is added into the current regulation factors and the fuzzy controller is used to optimize the current regulation factors in real time. Simulation and experimental results show that the proposed strategy can synthetically solve the problems of unsatisfactory performance of quadrature axis current regulator and serious current coupling in flux-weakening operation, improve the dynamic performance of PMSM, and has the triple functions of anti-saturation, current decoupling and flux-weakening control.
undersea vehicle propulsion system; permanent magnet synchronous motor(PMSM); flux-weakening control; dynamic performance; three-degree-of-freedom dynamic internal model decoupling; anti-saturation
相关文章导航
1. 张明明, 刘维亭, 魏海峰, 等. 基于滑模观测器的PMSM单相霍尔位置传感器故障容错控制算法[J]. 水下无人系统学报, 2019, 27(6).
2. 张珂, 李鹏, 颜开, 等. 空化器操纵过程水动力试验方法[J]. 水下无人系统学报, 2019, 27(4).
3. 符盼; 王建平. 浸水式无刷直流电机瞬态温度场分析[J]. 水下无人系统学报, 2018, 26(1).
4. 郭志荣, 高峰, 王其林. 基于RBF网络和MRAS的鱼雷永磁同步电机无速度传感器控制方法[J]. 水下无人系统学报, 2017, 25(6).
5. 樊晓波, 胡利民. 充磁方式对永磁无刷直流电机激振力波的影响[J]. 鱼雷技术, 2016, 24(6).
6. 李宏, 张鹏举. 双三相电机感应电机矢量控制研究[J]. 鱼雷技术, 2016, 24(5).
7. 王俊杰, 马恩林. 无铁心盘式PMSM损耗和温度研究[J]. 鱼雷技术, 2015, 23(5).
8. 吴凇, 陈钢. 基于量子遗传算法的电机优化相关策略及参数选择[J]. 鱼雷技术, 2015, 23(2).
9. 吴凇, 陈钢. 改进量子遗传算法在电机结构优化中的应用[J]. 鱼雷技术, 2015, 23(1).
10. 钱鑫, 王崇武, 于琨琨, 等. 基于递推最小二乘法的永磁同步电机参数辨识[J]. 鱼雷技术, 2014, 22(6).
11. 王松林, 谢顺依, 张林森. 无刷直流电机直接转矩控制下的转矩脉动抑制[J]. 鱼雷技术, 2014, 22(3).
TJ630.2; TM351
A
2096-3920(2020)01-0057-10
10.11993/j.issn.2096-3920.2020.01.009
尤钱亮, 魏海峰, 常徐, 等. 基于三自由度动态内模解耦的PMSM弱磁控制[J]. 水下无人系统学报, 2020, 28(1): 57-66.
2019-07-10;
2019-08-14.
国家自然科学基金项目(51977101); 江苏省省重点研发计划产业前瞻与共性关键技术重点项目(BE2018007); 江苏省研究生科研与实践创新计划项目资助.
尤钱亮(1995-), 男, 在读硕士, 主要从事电机驱动控制研究.
(责任编辑: 许 妍)
