复杂地形环境下路径视觉关系评价研究
2020-02-25谭立黄楚梨李慧林箐
谭立 黄楚梨 李慧 林箐
1 研究背景
1.1 研究意义
在风景园林规划过程中,视觉关系是考虑的重要因素之一,通过看与被看物体之间的可视性来评价。面对地形变化复杂、山体高低主次不明显的山地丘陵地形,人工的判断往往需要耗费大量的时间。近几年来,随着地理信息系统相关的软件和技术被引入到风景园林规划研究中,人们开始尝试通过软件模拟场地的复杂视觉关系,评价景观的可视性并划分视域,辅助规划师进行判断。笔者期望从风景园林规划视角出发,以典型项目为例,拓展相关技术在行业中的应用。
1.2 国内外研究现状
针对视觉关系,风景园林行业已经涌现了多种分析方法,其主要包含2种研究方向。1)从视觉的细节感受出发,通过研究人的视角所摄的照片等影像资料,结合图像软件和情绪测度设备等工具,判断使用者的视觉感受和景物之间的关系。如杨波等[1]、陈筝等[2-3]的研究,该类研究在空间尺度较小的城市空间中较为有效[4]。2)从较大尺度的区域规划入手,判断区域的自然环境中景观要素之间的视觉关系。该类研究一般基于ArcGIS等平台,对广域的空间和起伏的地表而非城市进行分析,景物之间的可见性往往是研究的重点,如毛华松等[5]对川江流域山水格局的研究。该类方法常用于辅助规划师进行较大尺度空间下的宏观规划决策。
针对第二种研究方向,目前风景园林行业主要采用的方法为二元视域分析。二元视域分析一般仅限于区域景物对单个观察点的可见性,或对多个点总体的可见性。该方法由Travis等[6]提出。对于单个观察点的可见性,往往在主要游步道选择固定的观测点,在一定观景范围内进行分析[7]。对于多个观察点,Franklin等[8]提出了基于路径变化的移动视点的视域研究方法,它是对单个观察点分析的简单拓展,即计算区域景物对于多个观察点是否可见,如张俊超[9]选择山体中的多个观察点,研究山体景物哪些能被见到。吴德雯[10]、赵威[11]等也提出了判断一个视觉走廊中多个观察点可视性范围的方法。
然而,二元视域分析结果对于景观设计指导意义有限,Fisher等[12]指出,传统的运用GIS软件进行视线分析通常只能得出二进制的结果,即某个点是否可见,这对于视域分析具有局限性,因而提出了概率可见视域,即计算一个连续移动过程中,每个景物被看到的概率,概率越大,其在整个观察过程中起到的影响越大;Claudio[13]也提出景观可视概率的计算方法,并归纳其为累积性视域分析。该方法在国内的相关研究和实践中鲜有应用。
事实上,累积性视域分析也存在一定的局限性,其只能判断景物是否可见,但不考虑景物与观察点之间的距离关系、角度关系。国外研究中提出“视觉幅度”(visual magnitude,简称VM)的概念,在确定视点是否可见的基础上,计算其可见的程度,如Santos等[14]提出了一种使用立体角度计算视点可视程度的方法。Chamberlain等[15]选取一段加拿大肯尼迪湖流域的环太平洋高速公路为研究对象,使用Java编程,对视觉幅度进行计算叠加,得到该地形复杂地段移动视点的视域权重,该指数考虑在可视前提下,每个视觉要素在人眼中所占的幅度,其核心评价因子是角度和距离,该方法很大程度上弥补了累积视域分析对视觉关系评价的不足。
在风景园林规划应用中,除了地形所产生的可视性关系以外,地表类型和视觉空间特征往往也是分析视觉关系的重要因素。随着遥感图像处理技术的发展,人们能够迅速地利用机器学习识别用地类型并进行分类评价。对于视觉空间特征,在建筑和城市规划领域常采用空间句法的方式进行评价[16],但该方法对于空间连续性强、边界变化复杂的自然山水环境的适用性很差。
总体而言,风景园林规划领域内,针对较大尺度的视觉关系研究,国内仍然以简单的二元视域分析为主,鲜有采用累积可视性、视觉幅度等分析方法进行更深层次的探讨,地表类型和视觉空间特征也很少被纳入评价的因素当中,对于视觉关系分析所考虑的深度十分有限。本研究尝试将相关方法与实践相结合,提出在复杂地形环境中更加深入的视觉关系评价方法。
1.3 研究对象与目标
G247旅游快速路规划建设于四川省自贡市南郊,长约13 km,是一条穿梭在郊野的旅游风景路,连接了沿途的多个郊野旅游景区,其主体车行道由当地交通部门设计。自贡市南郊有着西南地区典型的丘陵地貌,梯田和水塘、林地和村落密布其中,有着良好的郊野风景本底。规划期望在现有的车行道基础之上,沿路建设郊野慢行绿道,并对道路周边区域的风景提出控制性规划导则,保证未来沿途郊野风光的品质。
图1显示了G247道路的区位和其周边的地形状况——大小不一的山丘使得道路沿途的地形十分复杂。在编制控制性导则的过程中,对于该地区不同区域视觉关系的分析尤为重要,其决定控制性规划中不同区域在未来规划建设中的分级和策略。
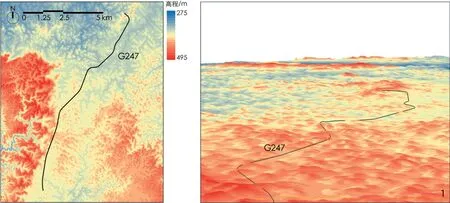
1 G247与周边地形G247 and surrounding terrains
2 研究方法与结果
本研究包含3个部分,即地表类型评价、地形可视性评价和视觉空间特征评价。
2.1 数据来源与处理
本研究采用的数据源主要包括高精度高程数据和遥感影像。高程数据由当地测绘局提供,遥感影像来源于Landsat8卫星2017年6月遥感数据。G247道路由当地交通部门设计,研究依据设计高程和空间位置,在Rhino中对其进行准确建模。所有的数据都转译到ArcGIS数据库中,并通过人为校正对其坐标进行配准。为了后续的计算,高程数据被转化为分辨率5 m的栅格数据。
2.2 地表类型评价
地表类型即景观的类型。在道路景观的规划中,地表的类型往往也是决定景观质量的重要因素,不同类型的地表往往也对应着不同类型的保护和控制策略。此外,一些地表类型如建筑和林地往往具有一定的高度,在距离视点较近的区域,这种高度差异也会明显地影响景观的可视性。
地表类型往往可以通过测绘获取较为准确的数据。本研究由于没有相关的基础资料,因此采用ENVI软件中对遥感影像的监督分类功能进行提取。将该地区的地表类型分为建筑、裸露地、农田、林地和水体5种,并通过目视解译进行校正(图2-1)。研究亦将建筑和林地的结果叠加到高程数据中,其中,建筑高度取5 m,林地高度取8 m,该数值由实地取样测绘获得。图2-2显示的即为修正后的高程图,用于后续地形可视性的评价。
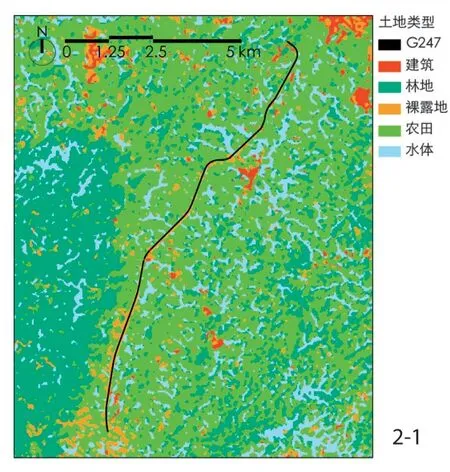
2-1 遥感卫星释译用地类型图Remote sensing satellite interpretation of the land type classification
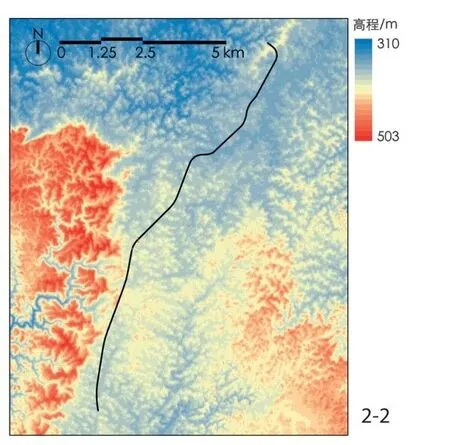
2-2 校正后周边地表高程图Surrounding surface elevation after correction
2.3 地形可视性评价
2.3.1 累积可视性评价
在道路景观中,人的视点不断发生变化,周围的景观由于地形遮挡,不同位置被看到的频率是不一样的。往往被看到频率越高的景观对于周边景观的控制规划越重要。在ArcGIS中,不同景观被看到的频率可以通过累积可视性来衡量。
可视性分析是ArcGIS空间分析工具中的基本工具之一,其通过计算观察点和周边所有栅格的竖向空间关系,判断每一个栅格是否可见。该工具可以同时计算多个观察点与周边地形的可见性关系,输出图层包含了周边的每一个栅格被看见的次数,该次数即为该点的累积可视次数,其大小反映了多个视点看到这个栅格的频率。
在研究中,将G247等分为100个视点,同时计算周边所有栅格相对这些视点的可见性,得到周边景观的累积可视性分布(图3-1)。因可视范围对于视觉的影响因子可以通过后续视觉幅度的评价得到,因此研究中可视范围为无限大。根据累积可视性的大小,研究将其分为了高低2个重要级(图3-2)。
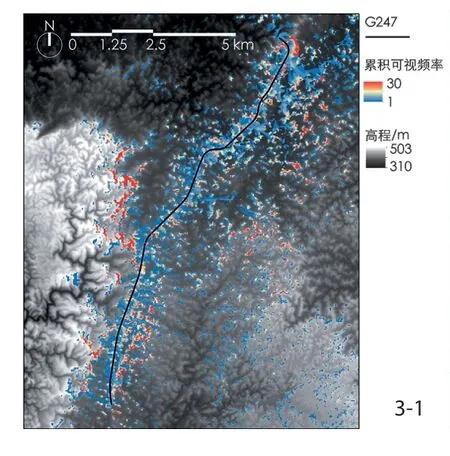
3-1 累积可视性频率Cumulative frequency
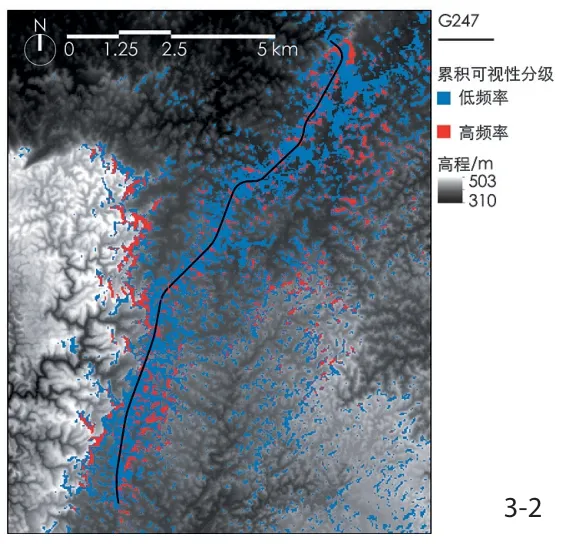
3-2 累积可视频率分级Cumulative visibility frequency classification
2.3.2 视觉幅度评价
累积可视性评价是针对周边景观被看到次数所得出的评价,但事实上,景观与人之间的视觉关系不仅仅取决于被看到的频率,也与其在人视觉中所占的比重有关。视觉幅度即是用于衡量这一标准的参数。在Chamberlain的研究中,首次提出了道路景观中视觉幅度VM的一种计算方式,其公式如下:

式中,VM为某一栅格相对某一视点的视觉幅度,d为栅格边长,v为由视点指向栅格中心的向量,而|v|即为该向量的长度。β和θ分别为栅格平面中心的法向量n与向量v在xz、yz平面上投影的交角(图4)。从该公式中不难看出视觉幅度大小判断的原则:视觉幅度的大小反映景观与人视点之间的距离关系和角度关系,该指数与距离成反比,当视线和栅格平面的法向量平行相对时,该指数最大,当视线和栅格平面的法向量垂直时,该指数最小。对于视觉的判断来说,一般情况下,视觉幅度越大,说明该景观在人视野中所占的比重越大,越能影响人们对周边环境的感知和评价。
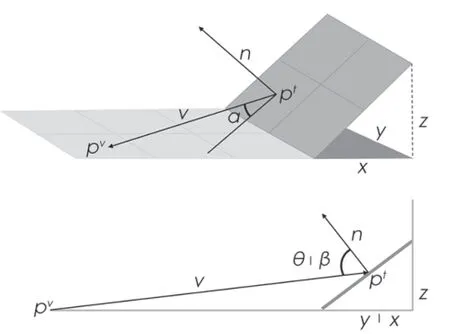
4 VM相关几何关系示意Schematic diagram of geometric relationship between VMs
本研究的视线几何关系采用以下公式计算:
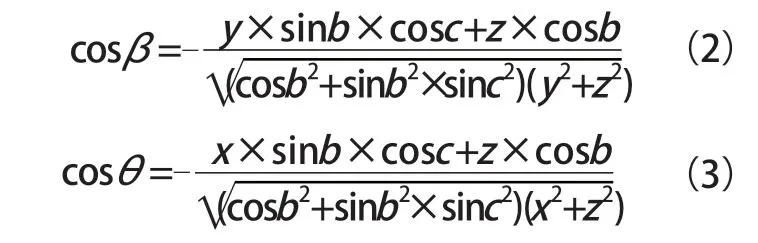
其中,b为坡度角,c为坡向角,计算以视点坐标为(x1,y1,z1),而所视表面的栅格中心点为(x2,y2,z2),得到其差值x=x2-x1,y=y2-y1,z=z2-z1,并代入其中计算。
在道路景观中,由于视点是多个的,因此还需要计算累积的视觉幅度。本研究采用了平均累积视觉幅度计算,即计算的是一个栅格相对所有视点得到的视觉幅度的平均值。该计算由python进行for语句循环迭代完成,计算后得到多个点的VM值并重新链接到ArcGIS中,获得G247周边栅格相对于这100个视点的平均累积视觉幅度(图5-1)。为了对未来区域进行更清晰的分析,研究对平均累积视觉幅度按照高、低2级进行分类(图5-2)。
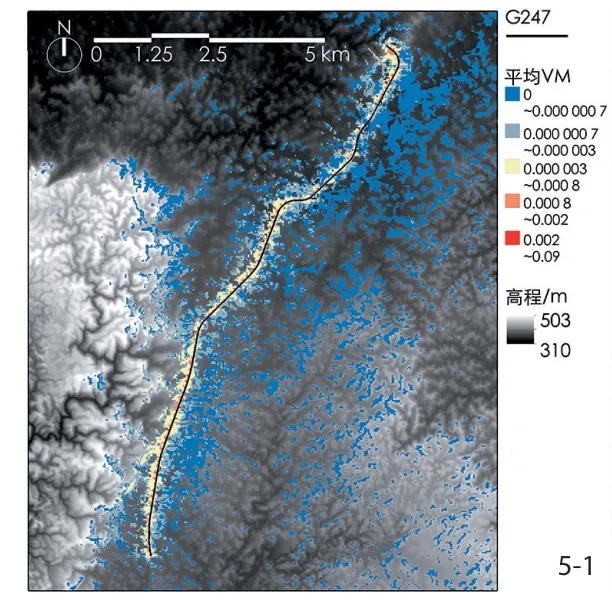
5-1 平均VMAverage VM
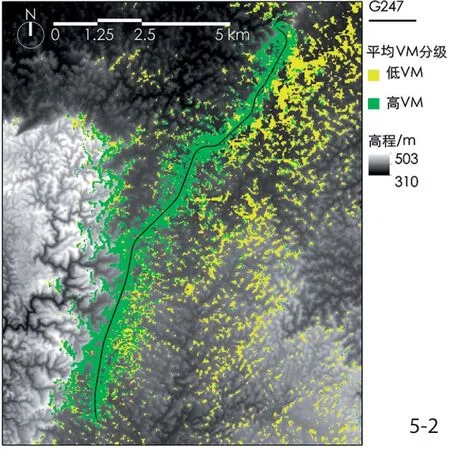
5-2 平均VM分级Average VM classification
2.4 视觉空间特征评价
除了路线周边的景观控制以外,也需要了解道路景观不同视点空间感受的特征,即人们在某一路段的空间感受是闭塞还是开敞,是在谷地中还是在旷野中。
利用ArcGIS对G247路线上的100个样点进行了精确可见性分析,分析模式选用OBSERVE,分析结果包含了周边可见栅格上,每个观察点对应见到该栅格的次数。通过叠加每个观察点对所有栅格的累积可见次数,得到了每个观察点的可视性,即由该点向四周观察,可以见到的栅格总数。可见到的栅格数量越多,说明该视点视野越辽阔,相对的视觉空间也更加宽广舒朗。图6是对每个点的可视性分别按大小和颜色渲染的结果。整体来看,整个沿途的视觉空间变化十分频繁,呈现出大小空间交替出现的状况。图中红色的观察点有着较大的可视性,作为沿途观景平台、休憩驿站的潜力较大。图中红色框中的区域整体的可视性较高,未来有更大的潜力,通过慢行路线设计、平台设计和微地形的调整加强可视空间的连续性,形成更整体的视觉空间区域。
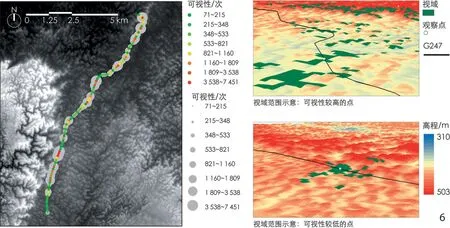
6 G247沿途视觉空间特征变化及三维模型中不同可视性点视域范围的示意Visual spatial characteristics of G247 along the road. The right side is a representation of different range of visibility points in the 3D model.
3 研究结论
通过以上研究结果,为规划师对该风景道及其周边景观的控制提出建议,包括以下3个方面。
3.1 辅助划定控制区分级边界
由地形可视性分析结果可知不同景观对于游览者的重要性,能够为未来控制区的划定提供参考。对比累积可视性评价和视觉幅度评价的结果,可以清楚地看出其分别从不同的角度对周边景物的可视性进行了评价(图7)。
7 累积可视性评价和视觉幅度评价的结果对比Comparison of cumulative frequency and VM analysis results
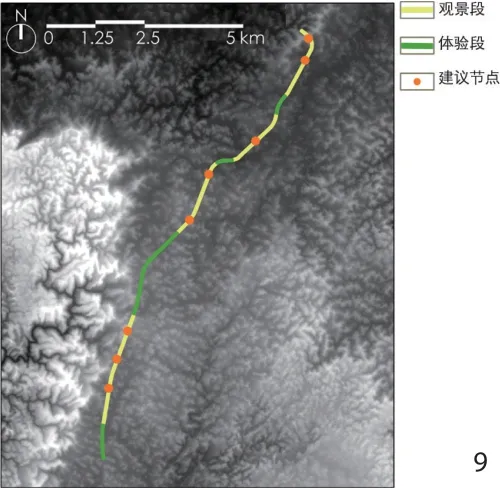
本研究将视觉幅度评价图和累积可视性评价图进行叠加,获得控制区重要性分级图(图8-1)。该图根据视觉幅度和累积可视性等级的组合关系,一共产生了4种结果,分别命名为高敏感区、低敏感区、幅度偏向区、频率偏向区(表1)。未来规划设计中,可以根据该分区对周边控制区展开分级控制。需要说明的是,根据实际规划中对控制性条件的精度需求,该矩阵可以无限细分,即调整视觉幅度和累积可视性评价各自的等级数量即可。笔者提出的是最简单的矩阵模式。
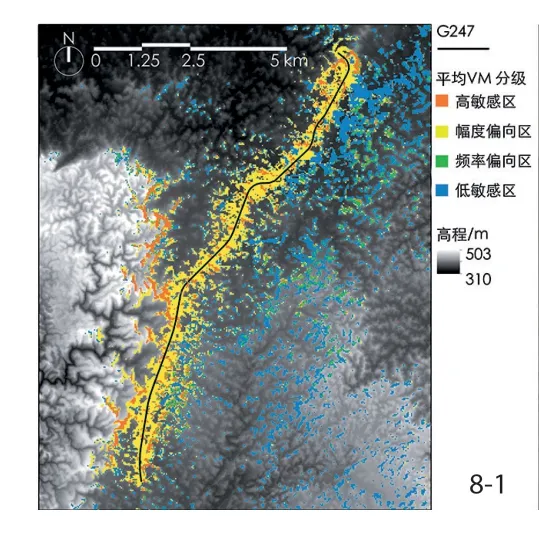
8-1 叠加分区结果Overlay partition result
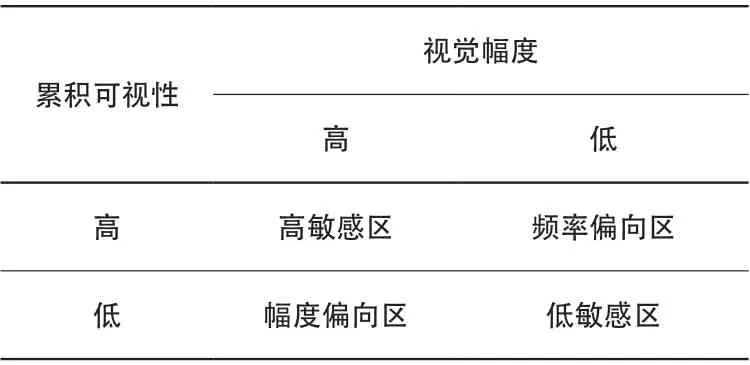
表1 视域分区评价矩阵Tab. 1 Horizon partition evaluation matrix
视觉高敏感区和视觉低敏感区分别是控制级别最高和最低的区域。在规划中,低敏感区虽然能被看到,但其对整体的视觉影响较小,因此可以考虑将其排除在重点控制区域外。高敏感区是周边区域中对人们视觉影响最大的区域,因此是控制级别最高的区域。
幅度偏向区是视觉幅度高但累积可视性低的区域,这些区域被看到的次数不多,但一旦被看到往往会在人们视野中占有较大的比重,这意味着这些区域往往会频繁地在人们的视野中切换,且占据较大的面积,因此需要注意景观细节和整体性的控制。从图8-1的结果中可以看出,该类型的区域基本位于G247周边,且具有较高的整体性。
频率偏向区是视觉幅度低但累计可视性高的区域,这些区域在人们视野中所占的比例较小,但经常被看到,这些区域的景观控制可以更加粗放,但是适合放置地标类的景观。从图8-1的结果中可以看出,该类型的区域主要分布于G247东侧较远的丘陵上。由于区域本身丘陵起伏的地貌,该区域的视域分区结果是较为破碎的,在实际规划中,可根据规划精度的需求和景观保护的整体性对分区结果进行人为校正,使之更加整体和易于实施。图8-2是人为校正后的边界。
8-2 人工校正后的分区Manually corrected partition
3.2 根据地表类型提出分类控制导则
地表类型反映了未来规划控制的主要对象,未来可结合控制区分级边界提出不同的控制策略。该部分获得的数据可以用于后续的详细编制导则。如对于建筑,可从高敏感区、频率偏向区和幅度偏向区分别提出控制性建议。
3.3 辅助进行分段主题定位与节点设置
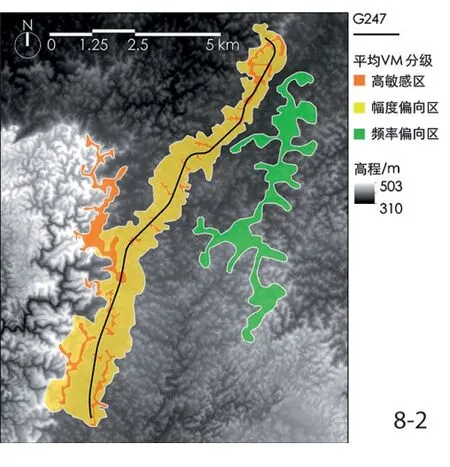
视觉空间特征评价的结果可以辅助规划师对整个道路视觉空间变化的特征和规律进行总结和判断。如图9所示,该图将整个路段分为了2种类型,观景段即相对视野较大的区段,适合规划为以观赏农田湖景、远山村落等观赏为主的段落。体验段即相对视野较狭窄的区域,在实际环境中一般为山谷、林地中或靠近建筑的区域,这部分适合规划为以森林疗养游憩、农家乐等体验为主的段落。而在地形复杂,且景物组合较为均质的区域中,视野开阔、视线深远的观察点往往能够吸引人们驻足停留。图9中的建议节点即为分析结果中,视野最佳的区域,未来具有设置成观景与休憩节点的潜力,是进一步规划过程中值得深入考虑的地点。
9 分段主题定位与节点设置建议Segmented topic targeting and node setup recommendations
4 结语
本研究提出了一个综合性的、以GIS技术为基础的视觉分析思路,弥补了国内相关领域对视觉研究方法和思路的不足,对于辅助规划师进行规划决策能够提供有效的帮助。但是受到技术条件、数据来源等的限制,本研究仍然还有较大的拓展空间:1)由于数据安全和保密需求,分析获得的结果都是对分辨率进行压缩后的结果,在实际应用中,只要数据本身的分辨率足够,分析的结果能够更加精确,相关结论得出的范围边界也能更加精确,也可以用于更小尺度场地的精准分析;2)核心的计算方法即VM的算法计算量较大,因此需要花费一定的计算时间,而且该算法仅能通过脚本实现,还未有成熟的专用分析工具,该方法的优化和分析软件的开发也是未来可以研究的重点。
采用的方法具有较大的应用潜力。一方面,对于丘陵地区、山地地区等视觉关系复杂的区域,尤其是游步道等线性视线走廊,该方法能够为规划师的决策提供较大的辅助。由于该方法适合用于以自然地形为主的区域中,其依据的地形格局在时间上具有较大的稳定性,因此在历史区域景观研究方面,能够更精确地为历史上山城之间视觉关系的研究提供参考,辅助考据和论证传统景观体系和山形的关系。另一方面,该方法的基本算法可通过调整完成逆向的判断,即通过对区域视觉关系的评价,为游步道等路线的选线提供辅助。期望能够通过进一步深入的研究,对未来的规划工作提供更多的辅助。
图表来源(Sources of Figures and Table):
图1~3、5~9由作者绘制,底图高程数据、道路路线数据由自贡市规划局提供;图4引自参考文献[15];表1由作者绘制。