基于TRIZ理论的扫地机器人打扫中止问题求解
2020-02-11王晶晶张换高
王晶晶, 张换高
(1.江苏财会职业学院,江苏 连云港222061;2.河北工业大学 机械工程学院,天津300401)
0 引 言
现代社会,具备人工智能、操控灵活且简单便捷的智能化家居受到越来越多的人青睐[1]。扫地机器人作为智能家居的一种,具有较好的发展前景[2]。配备人工智能的扫地机器人在工作过程中可以减少人为操作,实现自动扫地、拖地。扫地机器人的主要工作模块包含刷扫和真空吸尘两种,工作原理为先通过刷扫将地面杂物清扫,随后采用真空吸尘方式将杂物吸纳进入自身的垃圾收纳盒(通称集尘盒)内,再配合组件拖布,从而完成地面清理的功能。
机器人的行走路径计算一直是研究的热点[3-5]。较多学者将研究重点放在扫地机器人的路径、定位等方面,因为扫地机器人的行走路径不仅涉及到清扫的覆盖面[6],也关乎自动回充[7]、回避障碍物等功能实现[8]。许多学者通过各种计算公式,研究设计各种传感器、机械结构等[9]规划扫地机器人的行走路线,实现边角缝隙打扫、自助回充等功能。李梦、徐佳璇等[10]结合DHT11和LCD1602液晶显示器、ADC0804电压采集芯片及制冷芯片TEC1-12706来实现机器人的温湿度感应,从而设计了智能除湿扫地机器人。对于扫地机器人的故障研究,主要的重点放在了充电故障的原因分析,其中包括了因路径规划原因无法到达充电底座的情况[11-12]。
某公司某型号的扫地机器人在工作过程中,虽然能满足客户的各种打扫需求,如随机式自动打扫、边角打扫、弓形打扫等,但是在打扫过程中,经常出现车体停止,并伴随微尘感知灯高频率闪烁、发出异常提示音等现象,需要用户仔细清洁V形长滚刷、微尘感知器、吸气通路、集尘盒等硬件,才能使扫地机器人恢复正常。经过分析发现,在使用时,造成这些异常的直接原因主要有:1)日常生活室内地面垃圾不仅有灰尘,也包括了长发和较大的纸屑纸团。长发经常缠住长滚刷,导致其卡住无法正常滚动;纸团纸屑堵住吸气通路,无法正常进入集尘盒内。2)打扫时,刷子的转动产生静电,使得灰尘吸附在微尘感知器,导致微尘感知器误触发。3)柜子、沙发、床具之间距离地面的缝隙高度、宽度有限,机器人无法进入打扫甚至被缝隙卡住。4)集尘盒内还有足够的容量,但灰尘悬浮的特殊性导致集尘盒已装满。基于以上原因,本文通过TRIZ理论方法[13]提出解决方案,提高扫地机器人在无人状态下的工作效率。
1 系统的组成与工作原理
1.1 系统的组成
某公司某型号扫地机器人由本体、感应器部、操作部和附属组件4个部分组成。其中,本体为打扫的主体,由车体、小边刷、V形长滚刷、车轮、集尘盒、过滤网、锂电池等硬件组成。感应部分的红外线感应主要感知障碍物,能自动避开障碍物;微尘感知器主要用于感知灰尘,便于车体自动来回行走反复打扫,也用于提示集尘盒满载时及时清理;信号接收窗主要起接收充电座、遥控器发射的信号作用;防跌落感应器则位于车体底部,主要防止高度差过大时造成的车体跌落。操作部分由开关、开始/停止键、微尘感知灯、状态指示灯和预约灯组成。主要附件有拖布组件和遥控器。
1.2 系统的工作原理
该款扫地机器人在电能的驱动下工作时,外在表现主要为:内部的驱动模块驱动车轮、边刷、V形长滚刷转动,车体来往于房间中,开始打扫卫生,红外线感应和防跌落感应作用于整个工作过程中,防止与障碍物碰撞或跌落。同时内部的吸尘模块开始运作,利用真空吸尘的方式,垃圾通过边刷清扫后,经过V形刷,被微尘感知器感应(同时微尘感应灯闪亮,闪烁频率与微尘量成正比),然后被吸入集尘盒内,最后拖布组件进行最后的清扫。根据不同的打扫需求,打扫模式分为自动打扫模式、周密打扫模式、边角打扫模式、螺旋打扫模式以及弓形打扫模式。
2 基于TRIZ的功能模型、冲突区域确定和可用资源分析
2.1 基于TRIZ的功能模型
根据扫地机器人的系统组成和工作原理,由于感知部分的红外线感应及防跌落感应不会造成扫地机器人工作中止,因此将车体、边刷、V形长刷、集尘盒、滤网、车轮、驱动模块、微尘感知器、吸尘模块划分为系统元件;地面的灰尘、毛发、纸屑等垃圾则为系统的制品;超系统元件则包括地面、墙角、柜脚等。由此画出某公司某型号扫地机器人的功能模型图如图1所示。

图1 某公司某型号扫地机器人的功能模型图
2.2 问题冲突区域确定
通过分析图1得出导致打扫中止的冲突区域主要有:1)集尘盒对垃圾收纳不足作用;2)毛发对边刷、V形长刷的缠绕作用;3)柜脚对车体阻挡的有害作用;4)较大垃圾对吸气通路阻塞的有害作用;5)微尘静电吸附在微尘感知器上,造成感知器对微尘感知的不足作用。由此分析出导致扫地机器人打扫中止问题的根原因为:V形长刷直径小、车身较厚较宽、集尘盒体积小、静电吸附(如图2所示)。
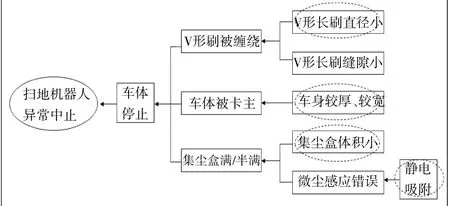
图2 打扫中止的根原因分析
2.3 可用资源分析
可用资源首先考虑系统内部资源,再考虑系统的外部资源[13]。根据扫地机器人系统元件组成、根原因的分析结果,建立资源列表如表1所示。
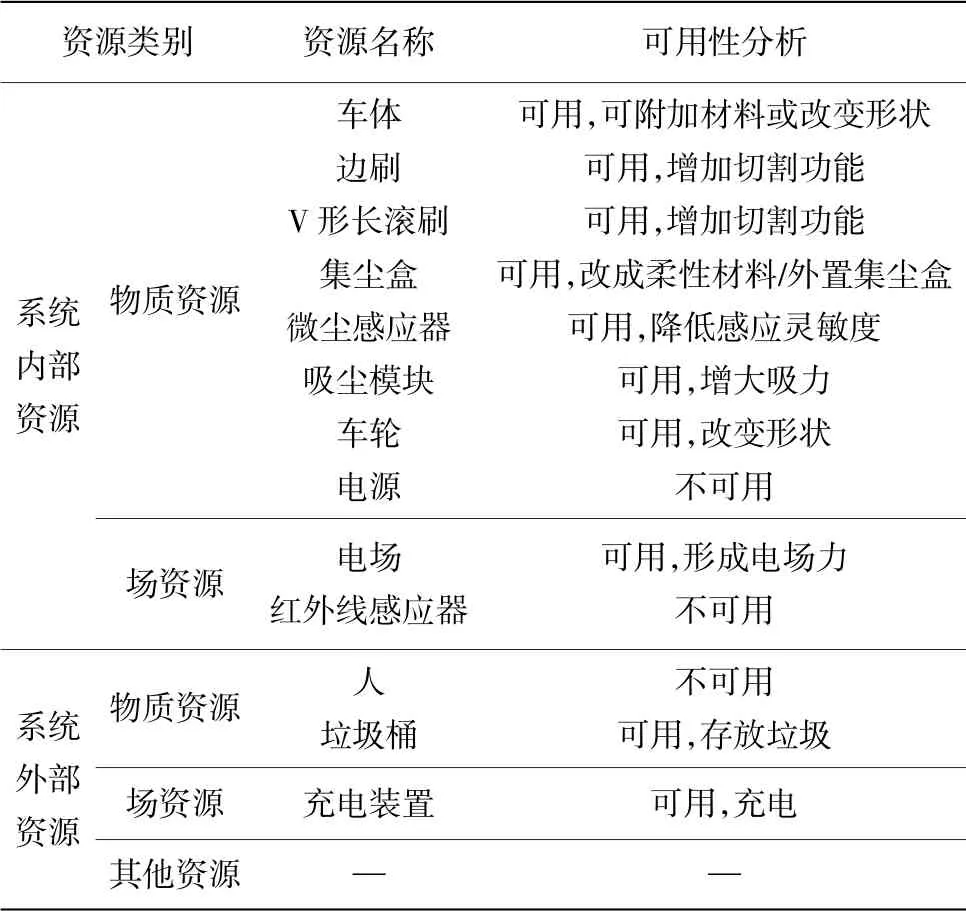
表1 可用资源分析表
3 基于TRIZ理论的问题求解
3.1 以“集尘盒容积较小”为入手点解决问题
1)冲突解决理论。为了增加集尘盒灰尘容纳量,需要扩大集尘盒的体积,但是会导致车体体积增大,车体行走受外界影响大。将此冲突描述转变为TRIZ标准冲突为:a.改善的参数:NO.7 运动物体的体积;b.恶化的参数:NO.30物体外部有害因素作用的敏感性。
查找冲突矩阵,得到NO.22、NO.21、NO.27、NO.35。依据NO.35参数变化中的第二条——改变物体的浓度和黏度,得到方案一:当灰尘进入集尘盒后,可以喷洒水雾,改变灰尘的黏度,使灰尘凝聚在一起,以此扩大集尘盒容量;依据NO.27低成本、不耐用的物体替代昂贵、耐用的物体,得到方案二:把集尘盒变为一次性塑料膜,该膜可通过空气,但无法通过灰尘等较大颗粒尘埃,一旦薄膜容纳的灰尘足够,新的薄膜形成,挤压旧的薄膜灰尘袋,帮助其自动从集尘盒内脱落。
2)物质-场分析及76个标准解。建立问题的物质-场模型(如图3),根据所建问题的物质-场模型,应用标准解流程得到的一般解法6——“插进一个物质S3,并加上另一个场F2来提高有用效应”[13]。由此得到方案三:在感应器感应到集尘盒内灰尘已满时,感应器自动伸入集尘盒内挤压灰尘,同时可以挤压阻塞吸气通路的较大垃圾。挤压完成后退出集尘盒,以增大集尘盒容量(如图4)。
3)进化路线分析。目前,集尘盒经历了藤条粪箕、塑料粪箕、提手式粪箕、集尘盒4个阶段,通过对现有技术系统的进化过程进行分析,选择技术进化定律“7向复杂系统进化”。依据现有技术系统的进化发展过程,选择技术进化路线为7-2增加部件的多样性进化路线,按照选定的技术进化路线,判断现有技术系统在进化路线上的位置进而确定潜力状态,如图5所示。

图3 集尘盒和灰尘的物质-场模型1
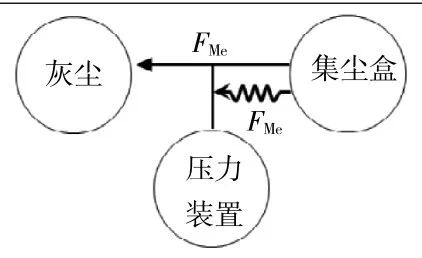
图4 改善后的集尘盒和灰尘物质-场模型

图5 集尘盒进化路线图
按照潜力进化状态,得到解决方案四:将集尘口前后开两个吸入口,每个吸入口距地面垂直距离不同、开口大小不同:较高、较大开口于前端,吸纳较大垃圾;较低、较小开口于后端,吸纳灰尘等颗粒。
3.2 以“V形刷直径过小”为入手点解决问题
1)冲突解决理论。为了不缠绕头发,需要V形刷直径参数大,但又为了减小车体体积,需要V形刷直径参数小,即某个参数既要大又要小。参数为正,可以避免毛发缠绕;参数为负,可以减小车体体积。考虑到该参数“V形刷直径”在不同的空间上具有不同的特性,因此该冲突可以从空间进行分离。选用4条分离原理中的空间分离原理[13],得到解决方案五:将V形长刷的前端直径变大,后端直径不变,避免缠绕毛发。
2)76个标准解。建立问题的物质-场模型(如图6)。根据所建问题的物质-场模型,有害效应的完整模型元素齐全,按照物质-场模型标准解流程,运用一般解法2:“加入第3种物质S3,S3用来阻止有害作用。S3可以通过S1或S2改变而来,或者S1/S2共同改变而来”[13]。得到方案六:在V形长滚刷上镶嵌锯齿状刀片(可根据需要自主拆卸),及时切割毛发或较大垃圾等物品,防止缠绕卡壳,如图7所示。
3)裁剪。针对功能模型中的有害作用、不足作用及过剩作用等小问题(如图8),应用4条裁剪规则直接裁剪中的第三条:主动元件的作用由其他元件或超系统代替。得到解决方案七:将V形长滚刷用带有吸附作用的抹布替代,抹布可制造成魔术贴式,可通过静电作用吸附毛发、灰尘、纸屑等,如图9所示。
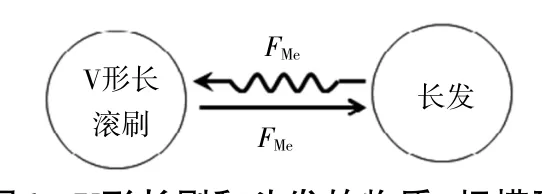
图6 V形长刷和头发的物质-场模型
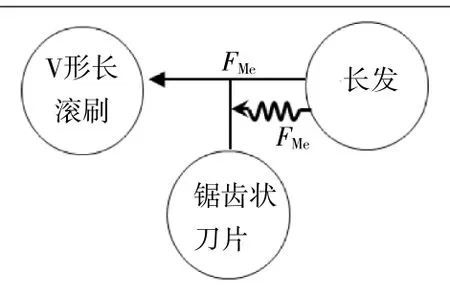
图7 改善后的V形长刷和头发物质-场模型
3.3 以“车体较厚较宽”为入手点解决问题
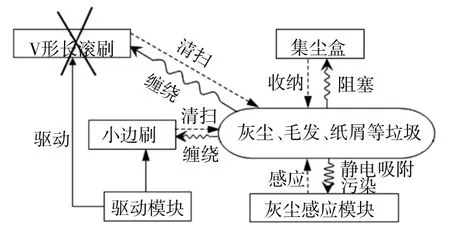
图8 裁剪前功能模型
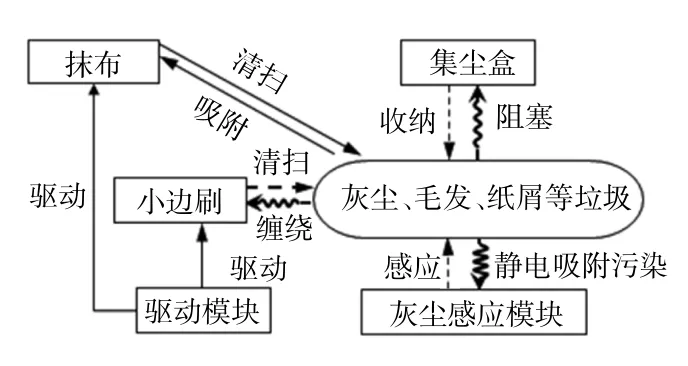
图9 裁剪后功能模型
1)冲突解决理论。为了增大集尘盒的容量,需要车体体积为正,但又为了能清扫柜脚缝隙,需要车体体积为负,即某个参数既要大又要小。考虑到该参数体积在不同的时间点具有不同的特性,因此该冲突可以从时间上进行分离。查找与该分离原理[13]对应的发明原理有“No.9, No.10, No.11, No.15, No.16, No.18, No.19, No.20, No.21, No.29, No.34, No.37”。选定No.29气动与液压结构“物体的固体零件部分可用气动或液压零部件代替,将气体或液体用于膨胀或减震”[13]。得到解决方案八:将扫地机器人车体外壳用充气式的橡胶代替,在车体受到柜脚等阻碍时,能够自动改变车体的体积,便于车体进入狭窄缝隙。
2)进化路线分析。通过对现有技术系统的进化过程进行分析,选择技术进化定律“提高动态性定律”,目前,扫地机器人经历了碰撞式扫地机器人、规划路线扫地机器人两个阶段。依据现有技术系统的进化发展过程,选择技术进化路线“4-4 增强系统可移动性进化路线”并判断现有技术系统在进化路线上的位置,进而确定潜力状态(如图10)。由此得到方案九:扫地机器人在柜脚间等狭窄区域卡住时能及时感应,在被卡死前退出被困区域并分离自身一部分(高度可移动系统),待分离体打扫结束回到本体,继续打扫房间其他区域。
3.4 以“静电吸附”为入手点解决问题
1)物质-场分析及76个标准解。问题的物质-场模型如图11所示。有害效应的完整模型元素齐全,根据所建的物质-场模型,得到的标准解一般解法3和一般解法6。
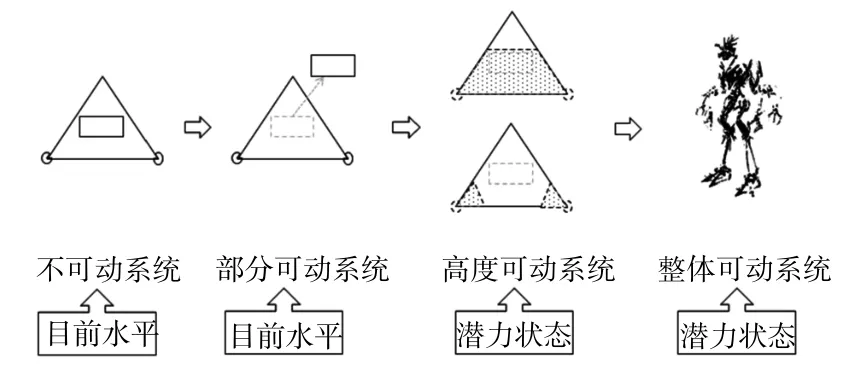
图10 机器人车体进化路线
一般解法3:“增加另外一个场F2来抵消原来有害场F的效应”[13]。据此得到方案十:在集尘盒与灰尘感应器之间增加一个电场,防止灰尘因静电作用吸附在灰尘感应器上,尽量使其吸附在集尘盒内,如图12所示。
一般解法6:“插进一个物质S3,并加上另一个场F2来提高有用效应”[13]。据此得到方案十一:在集尘盒与灰尘感应器之间增加一个毛刷,毛刷能清理灰尘感应器表面,防止灰尘因静电作用吸附在灰尘感应器上,如图13所示。

图11 物质-场模型图

图12 改善后的物质-场模型一

图13 改善后的物质-场模二
4 结 语
针对扫地机器人中止的问题进行根原因分析,运用TRIZ理论中的40条发明原理、物质-场模型76个标准解、裁剪和进化路径4种问题求解方法,得到共计11种解决方案。通过对11种解决方案的评价、分析,最终为解决扫地机器人工作中止问题,提出以下解决方案:将扫地机器人的主要清扫工具分离主体,每个个体能钻进狭缝,单独进行边角、柜底的打扫;在微尘感应器前安装小毛刷,及时清除因静电粘附的灰尘;可在扫地机器人前端安装静电吸附材质抹布,吸附长毛发、纸屑等垃圾;集尘盒用一次性物品替代,免去洗刷集尘盒的烦恼。
