全地形履带式越野寻迹六轮智能小车设计
2020-02-11施敏虎庄曙东黄金海
施敏虎, 庄曙东, 黄金海
(河海大学 机电工程学院,江苏 常州213000)
0 引 言
履带式六轮智能小车(轮式机器人)是一个涉及到多学科的综合系统,包括传感器、电子技术、人工智能、机械工程、计算机科学等[1],目前正朝着高级智能的机器人方向进展。本设计采用基于AVR的智能小车来实现对比赛设定的11种障碍环境(栅格地形、小型阶梯、大型阶梯、防滑带、凹形隧道、U形隧道、窄桥、柔软草地、石块地形、减速带、高台)进行设计制作。
1 系统整体设计
智能小车采用悬挂式结构,6个驱动力以适应特殊障碍环境下的行走需求。采用铆钉履带轮来增强小车的抓地能力,能在上坡或者比较湿滑的路面上正常行走。小车前置折叠轮可以由主控板控制、上下运动。当小车轮子陷入复杂环境卡死时,能够及时帮助小车脱离险境。采用对称布置,悬挂机构,重心在中线偏后的位置,使得小车在复杂斜坡上前进时不易失稳翻车。底盘经过加高处理,使得小车在崎岖道路上也能平稳行驶。小车在多种赛道中,虽然偶尔会出现进入死角的现象,但是通常都能平稳通过,表明设计方案具有一定的实际应用价值。车体结构如图1所示。
2 硬件设计
2.1 场地解析
小车自主顺利通过各种模拟障碍赛道,小车在发车后无需人为遥控或者辅助,通过自身传感器采集信号,烧录的程序做出相应的处理,控制相应的舵机或电动机运转,从而安全地通过各种障碍赛道。场地图如图2所示(图中栅格地形易卡轮;大、小阶梯、窄桥表面为砂面黑色防滑层,在上楼梯时小车的结构及重量易干涉小车运动;凹型隧道、U形隧道入口难,死角多,必须保证小车灵活转向;柔软草地易卡履带;石块地形、减速带与寻迹线同为黑色,易扰乱寻迹路线;高台离地面21 cm高,必须借助其他障碍物登上去)。

图2 场地解析图
1.U形隧道 2.窄桥 3.栅格 4.防滑带5.高台 6.减速带 7.小型阶梯 8.柔软草地 9.石块地形 10.大型阶梯 11.凹型隧道
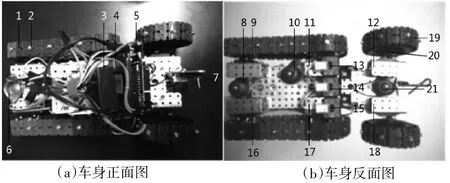
图1 屡带式六轮智能小车结构图
2.2 创新点与设计概述
1)设计一个六轮驱动的折叠车,主体部分采用四轮车,前轮需良好的攀爬能力——铆钉履带轮,履带外表加装螺钉,前轮增加垫片,扩大轮子直径,增强爬坡能力的同时提高了移动速度。
2)主体后轮需要在平直赛道部分得到足够的驱动力,来保证小车的速度,同时在管道行驶过程中,由于壁面非常光滑,铆钉履带轮反而防滑能力极弱,不适合用来实现差速转向,将履带缠绕棉花,增大地面摩擦,小车在管道中能灵活控制方向,行驶更平稳。
3)悬挂式结构,折叠车前部采用两个较大独立的履带轮,利用两标准舵机与小车主体相连,在通过阶梯时有效避免振动及卡顿。
4)小车前轮从动,后轮驱动,但小车在上坡时,动力不足,在栅格板行驶时出现卡死现象。基于这些实验现象,将小车主体驱动的模式改为四驱,增强驱动力,在一个轮子出现卡顿时,其他3个轮子仍在运转,有效缓解小车卡死现象。在小车前部折叠轮的选择上,为减轻整体重量,第一代小车采用单个从动轮形式,但在实际运行中,前置折叠轮带来的阻力过大,使得小车行驶缓慢,使用单个主动轮会使小车重心偏移,易发生侧翻,实验后,采用6个圆周舵机进行驱动,重心更加平稳,动力大,速度快。车体前后用黑胶布铰接,增强车体灵活转动
5)采用三黑标多线路的方法,避免使用颜色传感器简化了程序。黑标位置位于车中心靠前端的位置,有效避免了由于车身过长而引发的环境死角。安装一个LED照明灯,根据亮度不同,来作为控制三套程序的指示灯。
2.3 机械结构设计
机械结构设计如表1所示。

表1 机械结构设计
3 软件设计
障碍根据程序流程划分为三大类:1)循迹类(栅格、减速带、石块地形、U形隧道、凹形隧道、窄桥、柔软草地),在翻越此类障碍时,所采用的算法是在到达障碍前调整车身姿态,使其侧边行平行于黑色线,以便能够垂直进入障碍区域;而在U形、凹形隧道内主要采用循迹思想顺利通过隧道。2)抬升类(大、小型阶梯、防滑带),基于第一类障碍通过算法思想,利用标准舵机,使小车前轮抬起,从而使小车顺利攀上障碍。3)高台类(高台),利用单独一套程序实现,小车依次通过栅格,到达窄桥处开始延迟,达到窄桥顶部,机器人右转90°抬升前轮,改变车体结构,提升车体整体高度,使其能够顺利爬上高台。
越障机器人主要功能包括循迹、越障及完成指令操作。循迹部分包括巡线,在黑线的十字路口、丁字路口、斜线、直角等复杂路线下控制前进方向。利用3个黑标8种组合方式,通过采集、传送、分析,完成巡线功能。越障是本次研究的机器人的特点,在结构上具有独特的创新性、先进性。越障机器人没有人类的独立思考能力,完全依赖单片机的控制,而单片机则是依赖程序、算法来完成从信息的采集、信息的分析到命令的发送的一个过程。单片机性能虽好却比不上CPU,所以,精简、高效的算法是保证单片机执行指令的一个强有力的关键因素。
流程图如图3所示。
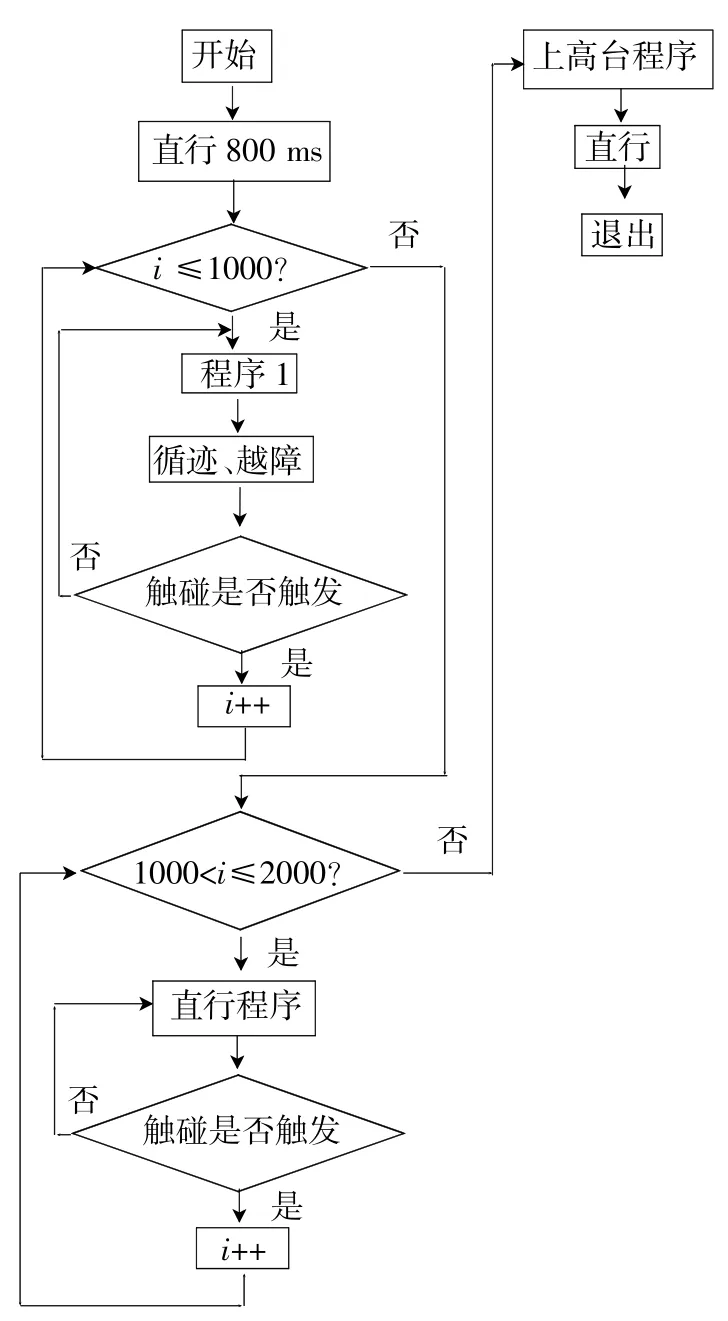
图3 流程图
4 系统开发与调试
利用3个黑标,传回3个1信号,将触发越障机器人的后退程序,将在系统运行的前13 s内,3个黑标传回1值时,执行直行程序,不仅可以顺利走出出发区,还能越过黄色减速带,13 s后,再遇到三黑标传回1值情况,将执行后退指令,退回线内,继续循迹。
越障机器人循迹依靠左右轮相对反转,加延时命令,使其能够原地调整车体方向,而不改变车体三黑标中间黑标位置进行高效转弯。在循迹过程中车体重心直接决定机器人的转弯中心,若不在黑线上,将直接导致车体调整中,3个黑标移位,触发其他指令。解决方案为:1)在安装过程中,使车体左右两侧对称,方便确定车体的重心所在,减轻工作量;2)在车身上不同区添加配重,改变车体重心。在转弯过程中,可以通过调节左右轮速度,改变黑标位移量。改变延迟命令的大小也是提高转弯效率的一个重要方法,延迟过小,车体无法及时调整,延迟过大,车体将偏向另一侧,只有合适的延迟量,才能提升车体转弯效率。
在攀爬阶梯的过程中易出现无法攀爬、车体歪斜等问题。无法攀爬直接决定无法翻越障碍,车体歪斜易导致机器人从障碍侧身通过,也易导致通过障碍后传感器不在黑线上,即循线丢失。无法攀爬、车体歪斜的原因:1)左右速度不一致;2)重心不在车体轴线上,在车体抬起瞬间就产生偏斜。通过调节左右轮速率及改变车体重心能够有效改善此种情况。
在通过防滑带及栅格的过程中,三黑标的状态易受凹槽、空格的影响,产生信号紊乱,触发程序的左右转指令,除此之外,车体依然易斜,致使车体通过障碍后循线丢失。解决方案为:在车体前安装触须,在接近防滑带时,触须传回信号,此时越障机器人发送抬起前轮并执行直行程序,并添加适量的延迟,屏蔽三黑标的信号紊乱。
对于石块地形,车体底盘较低,石块间距离落差较大,黄、黑色石块交叉构成,易影响黑标,触发不必要的指令。须屏蔽三个黑标的信号输入,选择执行直行指令,通过石块地形。
对于高台,直接攀上,车体结构必然复杂、庞大,难以控制,且不易通过隧道这类障碍。如选择在窄桥或大型阶梯的基础上跨过高台与此之间的空隙,可行性较高,但须路过石块,难度又增加,故放弃大型阶梯,故通过窄桥而攀上高台。在此路过栅格,到达窄桥顶部,右转90°,直行通过高台。疑难问题:1)如何通过丁字路口;2)如何保证车体能够垂直通过窄桥;3)如何判断越障机器人已到达窄桥顶部;4)如何顺利通过15 cm的间隙,攀上依然有4.5 cm高度的高台。多次模拟试验后:1)在出发时给越障机器人一定时间的直行程序,使其直接忽略丁字路口、进入循迹阶段;2)采用最优化的转弯算法、在最短的时间内调整好车体姿态、垂直进入窄桥;3)采取超声波这类传感器、监测车体到地面的距离,达到窄桥顶部时,超声波传感器传回一个固定的距离值与窄桥高度进行比较,或当越障机器人到达窄桥底部时,触发相关传感器,此时开始计时,一定时间后,越障机器人到达窄桥顶部,右转90°,此种方法简单可行,如遇上坡打滑等易发生意外;4)抬升前轮,攀上高台,车体的重心也尤为重要,否则翻下窄桥与高台的间隙之间。
5 结 语
本文设计一款智能小车采用悬挂式结构,六驱动力以适应特殊障碍环境下的行走需求,3个黑标实现寻迹,一个触碰实现程序切换,在实际使用中得到了验证,在大赛中也取得了好成绩,此设计保证了全地形机器人的越野性能,同时又保证了小车的灵活寻迹功能。
