一种磁测探头定位及位置获取机构
2020-02-11臧宗旸廖树清龙全红
臧宗旸, 廖树清, 龙全红
(中国工程物理研究院 流体物理研究所106室,四川 绵阳621900)
0 引 言
束流传输系统是加速器的重要组成部分,因此对束流传输元件的参数测量就显得尤为重要,其中包括对加速腔中螺线管线圈中轴线磁场分布[1-2]的测量。螺线管线圈中轴线磁场分布为束流力学物理模拟提供必要的数据支撑,便于更好地进行束流传输物理模拟计算。实际磁场测量过程中使用激光跟踪仪在空间建立基准坐标,通过测量磁测探头与螺线管线圈在基准坐标中的位置来确定二者之间的位置关系,因此获取磁测探头与螺线管线圈之间的位置关系成为工作重点。加速腔由螺线管线圈、其他部件和螺线管线圈壳体共同组成,4个加速腔又组成了加速组元[3]。如果采用手持式高斯计测量磁场,需要将加速组元拆卸成单个加速腔才能准确地测量磁场分布,而每个加速腔质量近1 t,拆卸过程比较麻烦,测量过程不具有连续性、衔接性,因此一定程度上增加了工作难度,大大降低了工作效率。如果直接对已经组装好的加速组元中的单个加速腔螺线管线圈进行精确的磁场测量[4-5],由于加速组元管道为细长管道,磁测探头在加速组元管道内移动过程中量程较长,空间不可视,要对磁测探头进行精确定位并且获取探头位置,一些传统手段不易实现,为此专门设计了一种高效率磁测探头定位及位置获取机构。
1 磁测探头与螺线管线圈位置关系测量的重要性
螺线管线圈磁场分布的精确测量需要满足两个条件:1)磁测探头与螺线管线圈的空间位置关系的精确测量;2)具备高精度的磁测探头。只有二者测量精度同时满足要求,才能最终保证螺线管线圈磁场分布的精确测量。此前我们已经选用了一种高精度的磁测探头,因此磁测探头与待测螺线管线圈的相对位置的精确测量成为整个测量过程中需要解决的重点和难点。
2 现有工况下测量难点分析
1)驱动磁测探头并且保持高直线度移动难度大。由于加速腔组元管道为φ148 mm的细长管道,空间过于狭小,如果采用传统驱动方式(如丝杠)等来驱动磁测探头,无法保持磁测探头在加速组元管道内沿轴向的高直线度移动。
2)不易精确跟踪磁测探头轴向位移变化。长度近2450 mm的加速组元管道中完全不可视,不容易实现探头轴向位移的精确跟踪。
3)不易精确定位磁测探头在加速组元管道中的径向位置。如果将磁测探头伸入φ148 mm加速组元管道后,无法确定其在加速组元管道中的径向位置。
基于上述情况专门设计了一种高效率磁测探头定位及位置获取机构,伸入加速组元管道并将其固定在螺线管线圈壳体前封板上,实现整个机构在组元管道外部的固定,然后对已经组装好的加速组元中螺线管线圈进行磁场测量,效果如图1所示。
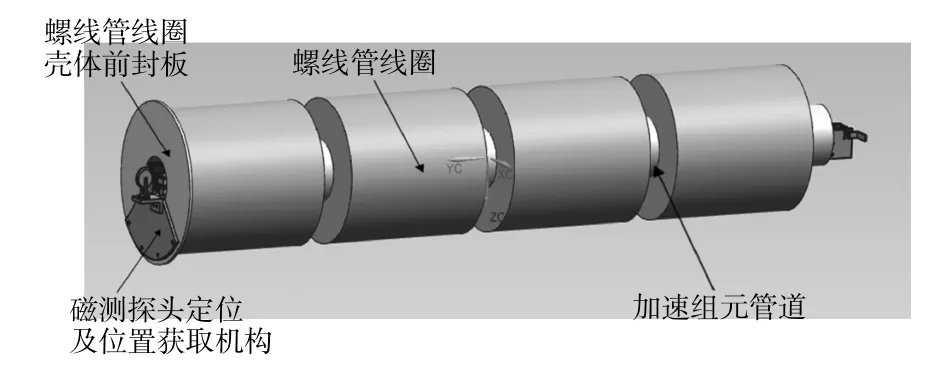
图1 磁测探头定位及位置获取机构装入加速组元管道中示意图
3 磁测探头定位及位置获取机构设计
3.1 总体设计
1)结构组成。磁测探头定位及位置获取机构由前滑轮、前滑轮固定座、固定板、磁测探头、探头调节机构、光栅尺、光栅尺读数头、导轨滑块、安装板、直线导轨、半月形垫块、后摇轮、后摇轮手柄、后摇轮固定座、钢丝绳组成,如图2、图3所示。

图2 磁测探头定位及位置获取机构局部示意图

图3 磁测探头定位及位置获取机构整体示意图
2)具体安装方式。在直线导轨下方以430 mm为间距等间距安装6个半月形垫块,使半月形垫块与直线导轨保持刚性连接,然后在半月形垫块上面安装光栅尺,最后依次安装剩余零部件(后摇轮手柄除外),此时可以将整个机构从加速组元前端伸入加速组元管道内部,直至固定板与螺线管线圈壳体前封板完全贴合,并安装后摇轮手柄,最后用螺钉连接固定板与螺线管线圈壳体前封板,最终实现了整个机构在加速组元管道内的固定。
3.2 设计中关键问题的解决
1)细长组元管道中磁测探头高直线度移动解决方案。用一根钢丝绳从安装板前端引出,从前滑轮底部绕过顶部,然后再从后摇轮顶部绕过底部,最后与安装板后端连接,通过摇动后摇轮上的手柄即可实现导轨滑块的移动,后摇轮驱动钢丝绳,钢丝绳牵引安装板,使得安装板带动磁测探头与光栅尺读数头在直线导轨上同步滑动,利用钢丝绳驱动磁测探头在高直线度的直线导轨上滑动,实现了探头在狭小空间的驱动,同时确保了磁测探头长行程直线运动路径的直线度。
2)精确跟踪磁测探头轴向位移变化。将磁测探头与光栅尺读数头同时固定在安装板上,并与导轨滑块固定,光栅尺读数头连接一数显屏,磁测探头连接磁场数据显示屏,并同时放置在加速组元管道外部。磁测探头移动的过程中,操作人员只需要通过光栅尺读数数字显示屏即可看到磁测探头所处的轴向位置,这样在加速组元管道外部就实现了精确跟踪磁测探头在加速组元管道中的轴向位移变化。
3)探头径向位置精确定位。半月形垫块与加速组元管道均为φ148 mm并有间隙配合,管道尺寸为φ148+0.060,半月形垫块尺寸为φ148-0.05-0.10,二者最小理论间隙为0.05 mm,最大理论间隙为0.16 mm,磁测探头装卡在探头调节机构(如图4)上并固定在安装板上,通过探头调节机构可以实现对磁测探头上、下、左、右4个方向的调节,来修正半月形垫块与加速组元管道间隙配合带来的偏差。具体解决方法为:左右方向在安装过程中基本保持对称,因此其间隙带来的间隙偏差很小,上下方向间隙偏差由于重力原因集中向下偏,假设真实间隙为最大间隙0.16 mm,并且认为向下偏了0.16 mm,我们取其中间值0.08 mm,向上调节0.08 mm即可满足磁测探头与加速组元管道同轴度的使用要求。在磁测探头定位及位置获取机构装入加速组元管道前,通过激光跟踪仪测量对中使磁测探头与加速组元管道同轴,由于整个机构具有很高的刚性,将机构装入加速组元管道后仍然能够确保磁测探头与加速组元管道的径向精确位置关系。
如图4所示,磁测探头装卡在探头卡子里面,并将探头卡子装入在卡槽座纵向槽里面,通过纵向固定螺钉连接探头卡子和卡槽座,稍微松动纵向固定螺钉,并通过调节纵向调节螺钉即可实现探头卡子在卡槽座的槽里上下滑动。以同样的方式在安装板上开横向槽使卡槽座装入安装板横向槽里,通过横向固定螺钉连接卡槽座和安装板,稍微松动横向固定螺钉并调节横向调节螺钉,即可实现卡槽座在安装板横向槽里的左右滑动,最终实现了磁测探头在上、下、左、右4个方向的调节。
4 使用效果对比
运用磁测探头定位及位置获取机构测量磁场与手持式高斯计测量磁场的效果对比如表1所示。

表1 磁测探头定位及位置获取机构与手持式高斯计测量磁场的效果对比
5 结 语
为了在不可视的细长加速组元管道中实现磁测探头的精确定位和位置获取,设计了一种高效率磁测探头定位及位置获取机构,该机构巧妙应用了光栅尺在不可视空间中可以获取磁测探头位置的特性,同时利用了狭小空间钢丝绳便捷驱动磁测探头的优点,从而实现了对磁测探头在不可视空间中所处位置的精确读取,最终实现了中轴线磁场分布的精确测量。该机构的设计思路可以推广到其他不可视及狭长空间的各种测量工作中。
