基于闭环反馈控制的小动物长骨轴向压缩应力载荷加载系统的研制
2020-01-19罗二平王佳晨刘曦雨颜泽栋
邵 希,罗二平,王佳晨,2,刘曦雨,颜泽栋,封 颖,蔡 婧,景 达*
(1.空军军医大学军事生物医学工程学系,西安 710032;2.解放军总医院医学工程保障中心,北京100853;3.陕西中医药大学基础医学院,陕西咸阳 712046)
0 引言
骨骼是机体的应力承载系统,其承受外源性应力刺激时,骨组织能够改变自身结构以适应应力的改变[1-2]。Frost[3]指出骨功能适应的控制过程是使应变和骨质量之间达到平衡的生物学过程。适当的应力刺激能够维持骨骼结构的稳定和骨骼功能的正常行使,缺乏应力刺激或应力刺激超出骨骼的承受范围均会导致疾病的发生[4-5]。因此,研制可构建动物骨骼应力载荷模型的实验平台对于研究机械载荷刺激与骨骼的关系至关重要。
周期性轴向压缩加载法是目前国际通用的骨骼载荷施加方法[6-7]。该方法具有无创、可只对动物一侧骨骼施加载荷(以对侧骨骼为参照)[8]从而减少实验动物使用量等优点,与跑台训练法、三点或四点弯曲法相比具有明显优势。课题组前期根据周期性轴向压缩加载法设计了一套小动物长骨应力加载装置[9],该装置通过一组与动物骨骼大小及形状匹配的夹具在水平方向上固定动物的尺骨或胫骨,并利用电动机对动物长骨进行轴向压缩加载。该装置可施加频率可控、强度精准的周期载荷,能精确、实时地检测骨骼承受的应力和位移。但该装置尚存在几点不足:由于骨组织蠕变效应和固/液相比例变化,加载初期应力逐渐偏离预设值,需手动调整电动机位置;应变变化是研究骨骼疾病(如应力性骨折)的一个重要指标,但缺少测量应变的模块;加载频率范围较小(0~1.5 Hz),不能满足某些实验需求。
针对以上问题,本研究基于LabVIEW设计的小动物长骨轴向压缩应力载荷加载系统增加了闭环反馈和应变测量模块,并将原装置的步进电动机更换为伺服电动机。改进后系统能精确、实时地检测骨骼承受的压力及骨表面的应变,施加的载荷能模拟生理状态下骨骼承受的应力刺激。闭环反馈模块可自动调节峰值力的大小以保证骨骼承受应力的精确性和稳定性。应变测量模块能实时显示应变大小,为判断骨骼状态提供了有力依据。伺服电动机有效提高了装置的加载频率范围,为开展多参数实验提供了平台。改进后的小动物长骨轴向压缩应力载荷加载系统的稳定性和精确性得到提高,为探索骨骼疾病(如骨质疏松、应力性骨折等)的发病机理及预防治疗措施提供了有力支撑。
1 系统设计
1.1 总体设计
小动物长骨轴向压缩应力载荷加载系统由硬件和软件两部分构成。其中硬件主体在课题组前期研制的小动物长骨应力加载装置[9]的基础上加以改进,由组织固定模块、线性导轨、力学传感器、调制解调器、电动机控制模块、数据采集模块等部分组成,改进后的装置如图1所示。小动物长骨应力加载装置通过线性导轨调节组织固定模块的移动轴距,由力学传感器连接组织固定模块与伺服电动机。在数据采集模块中,数据采集卡可分别采集力学传感器测量的实验动物长骨所承受的力学信号和应变片采集的骨骼应变信号,并将数据传输至控制程序进行滤波、放大等处理分析。电动机控制模块由伺服电动机和电动机控制器构成,电动机控制器可控制、驱动伺服电动机,通过LabVIEW控制程序设定伺服电动机运动的位移和速度。本系统采用周期循环加载方式,加载波形为斜坡加载,通过设定加载周期、峰值压力、加载频率等参数控制装置对大鼠或小鼠的胫骨或尺骨进行循环加载。小动物长骨应力加载装置测量实物图如图2所示,系统总体设计框图如图3所示。

图1 小动物长骨应力加载装置实物图

图2 小动物长骨应力加载装置测量实物图

图3 小动物长骨轴向压缩应力载荷加载系统总体设计框图
1.2 控制程序界面设计
2 系统关键技术研究
2.1 数据采集模块
为实时监测应力变化情况,本研究基于DAQmx驱动软件实时采集力学传感器检测的动物长骨承受的力学信号。系统采用美国NI公司USB-6008数据采集卡,可提供8个模拟输入(AI)通道、2个模拟输出(AO)通道、12个数字输入/输出(DIO)通道以及带全速USB接口的32位计数器,可满足力学信号的采集需求。
本系统中上位机发送的电动机运行控制指令经RS485串行通信接口发送至电动机控制器。RS485总线由2根差分信号线组成,驱动能力和抗干扰能力强,有利于走线和密封,能实现各模块的互联[10]。
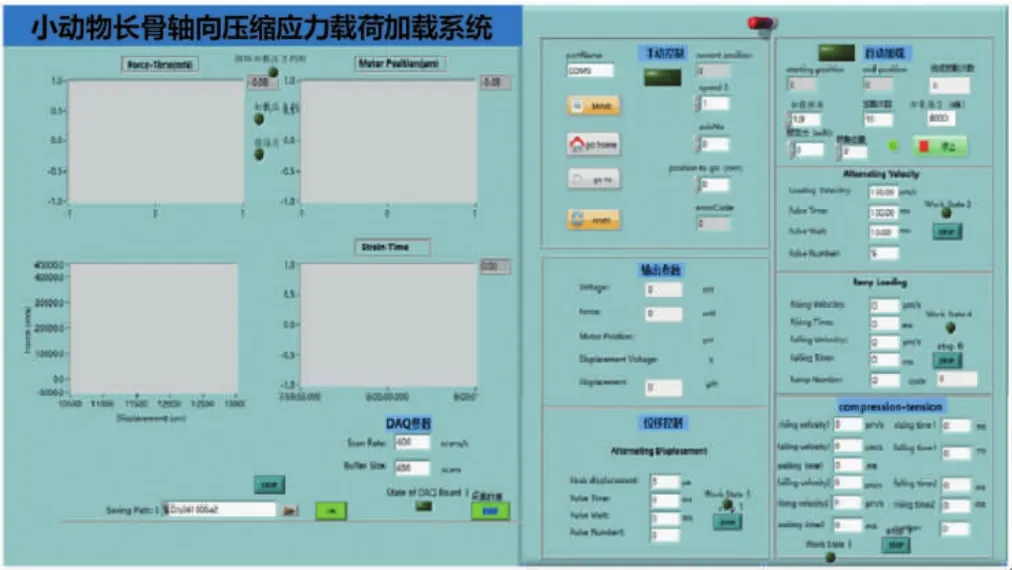
图4 小动物长骨轴向压缩应力载荷加载系统界面设计
2.2 电动机驱动模块
小动物长骨轴向压缩应力载荷加载系统前期采用的步进驱动电动机的有效加载频率范围仅为0~1.5 Hz,而某些动物骨骼加载模型所需频率为2~4 Hz[10-11],故不能满足构建频率较大的动物模型的实验需求。
本系统采用的伺服电动机最小行程分辨力为0.02 mm,有效加载频率范围为0~6 Hz,均满足实验需求。电动机控制器中的电动机驱动板以脉冲形式控制伺服电动机,伺服电动机每接收一个脉冲就会旋转相应的角度以实现位移[12]。同时,伺服电动机每旋转一次角度就会发出一个脉冲信号,程序控制系统通过比较接收的脉冲信号数与已发送的脉冲信号数形成闭环,提高了系统的稳定性与动态性,能够精确控制电动机的移动[11]。
与步进电动机相比,伺服电动机具有精度高、共振抑制能力强、有一定过载能力、运行性能稳定等一系列优点[12],因此改进后的系统稳定性和精确性得到提高,且有效加载频率范围明显扩大。
2.3 闭环反馈模块
动物骨组织具有蠕变效应,即在骨组织总应变不变的条件下,应力会随时间逐渐降低。在加载初期,因骨骼蠕变效应,应力会略微下降而后稳定。为解决此问题,设计了闭环反馈模块。实验过程中,上位机判断力学传感器采集的骨骼承受的实时应力与预设的加载压力是否一致,若不一致则自动调节电动机移动位置以调节压力的大小,从而保证压力的稳定与精准,其程序设计流程图如图5所示。闭环反馈模块确保计算机能智能精准调节电动机位置并维持骨骼峰值压力的稳定,提升了控制系统的精确性和可靠性,为动物模型的成功建立提供了条件。

图5 闭环反馈模块程序流程图
2.4 应变测量模块
应变是指外界作用力和非均匀温度场等因素对物体造成的相对形变[13],基于应变效应可测量如力、位移等诸多参数。本研究采用电阻式应变片,当受到压缩载荷时,骨骼受力产生形变,由金属导体的压电效应引起应变片内金属导体电阻值的变化。电阻式应变片的测量原理为
比如,《意林》杂志刊登的一篇杂文说,诺贝尔奖为什么没有数学奖?这问题,不止是我,相信不少人也都不甚了了。究竟什么原因呢?该文说,当年的诺贝尔,有个小他13岁的女友,他很爱她,她也爱他。但后来发现,她和一位数学家有暧昧关系,并最终和那位数学家私奔。对此,诺贝尔一直耿耿于怀。正是这件事,让诺贝尔在制定“诺贝尔基金会奖励章程”时,把数学排除在外。很显然,他在报复那位数学家的同时,无意中却报复了整个数学界。看来,有些名人,也有令人惊讶的毛病和缺点。几十年来,我耳闻目睹不少事,也读了不少书,但这件事,还是第一次听说,开了眼界,长了见识。岂能不乐?

其中,R是无应变时的电阻值;ΔR是产生应变时电阻的变化量;K为应变片金属导体的灵敏系数,表示金属应变丝的电阻相对变化与它感受的应变之间的线性系数;ε为应变。本系统采用的应变片的电阻值为120 Ω,灵敏系数为(2.08±1)%。
动物骨骼承受压缩载荷作用后,应变信号转换为应变片的电阻变化并经测量电路转换为电流或电压信号[14],经测量电路进行信号放大、低通滤波等处理后,由数据采集卡将信号传输至计算机进行处理和显示。应变测量模块的设计框图如图6所示。

图6 应变测量模块设计框图
3 系统使用及功能
小动物长骨轴向压缩应力载荷加载系统的使用步骤如下:
(1)按体质量为大鼠/小鼠腹腔注射戊巴比妥钠,使其麻醉。
(2)连接伺服电动机、力学传感器、数据采集卡等硬件的电源。
(3)打开程序控制软件,点击“运行”。
(4)在软件界面的手动控制模块设置电动机位置,并点击“go to”,固定小动物被加载侧于两夹头中,并使骨骼承受应力达到预载压力大小。
(5)在手动控制模块设置电动机达到预载压力的位置、电动机达到峰值压力的位置、加载频率、加载周期等参数。设置完成后由手动控制模块切换至自动加载模块,从而实现对小动物长骨的自动加载。
本系统能够完成的功能如下:
(1)可调节伺服电动机的移动位置、运行速度,从而控制施加于骨骼表面应力的幅值、频率、加载次数。
(2)基于闭环反馈的程序设计能保证系统施加于动物骨骼表面压力峰值的稳定性和精确性,无需手动调整。
(3)采用的伺服电动机可施加0~358 N的载荷,频率范围为0~6 Hz,最小行程分辨力为0.02 mm。
(4)可测量骨骼承受的应力及应变大小并实时显示其变化情况。
(5)可实现处理、分析、存储及显示数据的功能。
4 实验验证
4.1 应力载荷峰值稳定性测试
使用小动物长骨轴向压缩应力载荷加载系统向SD大鼠尺骨施加应力进行应力载荷峰值稳定性测试。改进前装置缺少闭环反馈模块,在加载峰值压力达到预设压力后,因骨骼蠕变效应影响,加载峰值压力先呈下降趋势而后趋于稳定,如图7(a)所示。系统改进后,载荷峰值压力的幅值基本不变,系统稳定性提高,能显著改善蠕变效应对实验的不利影响[如图 7(b)所示]。

图7 应力载荷峰值稳定性测试结果
4.2 骨骼表面应变测量与分析
本研究采用应变片测量压缩载荷作用下小动物长骨表面张应变以研究骨骼表面应变与应力的关系。将应变片牢固地粘贴于动物长骨前内侧表面(如图8所示),测量时保证骨骼的轴向方向、组织固定器的轴向方向与应变片的轴向方向均保持一致。采用应变片分别测量小鼠胫骨、大鼠尺骨、大鼠胫骨表面张应变的线性回归结果,如图9所示。结果显示,小鼠胫骨、大鼠尺骨、大鼠胫骨表面的应变量均随应力的增加而线性增加(R2>0.99),与前期研究所得趋势一致[8,15],表明采用本系统测量骨骼表面应变切实可靠。

图8 骨骼表面应变测量应变片粘贴示意图
5 讨论与结论
骨细胞能够适应特定的机械载荷环境,应力刺激能够改变人体及动物模型骨量及骨骼结构并与骨形成、骨吸收的过程密切相关。当机体缺少维持骨骼系统稳定的应力时,骨吸收过程大于骨形成过程导致骨丢失增加,最终导致废用性骨质疏松症的发生;当应力刺激超出骨骼的承受范围时,骨骼微裂纹产生并持续累积,最终导致应力性骨折的产生。适当的应力刺激能缓解骨质疏松、衰老等造成的骨丢失及骨质下降。因此,深入研究应力对骨骼的生物学效应,探索应力与骨骼疾病之间的紧密联系,对于研究疾病的发生规律及探索相应的防治措施至关重要。
与跑台训练法、跳跃训练法相比,本研究基于轴向压缩载荷法设计的小动物长骨轴向压缩应力载荷加载系统具有可施加频率可控、强度精准、模式一致的压缩载荷,避免动物出现耐受性,减少实验动物的使用量等优点。经实验验证,本系统通过闭环反馈模块提高了自身稳定性,可有效消除偏差、自动调整峰值载荷,解决了因蠕变效应导致的加载初期应力下降的问题。增加应变测量模块后系统能实时监测应变变化情况,实时监测骨骼表面应变及应力的变化关系,对于提高力学实验的重复性具有重要意义。另外,系统的频率范围扩大为0~6 Hz,可满足不同实验的设计需求,可向动物长骨施加压缩、拉伸、压缩协同拉伸3种模式的周期性载荷,较好地模拟了生理状态下骨骼承受外界应力刺激的情景。但是使用本系统构建动物模型周期较长时(大于2周),大/小鼠加载侧肘/踝关节会出现红肿、受损等症状。因此,后期需改进装置组织固定模块的材料及形状,以更好地契合小动物长骨的生理弯度。

图9 骨骼表面张应变测量结果
综上所述,本系统不仅为研究应力刺激与骨骼之间的紧密关系提供了条件,还为探索防治应力性骨折、骨质疏松等骨骼疾病新方法提供了重要的动物模型构建平台,具有广阔的应用前景。
