基于毫米波多基线InSAR的雷达测绘技术
2020-01-17王冠勇韦立登鲁耀兵胡庆荣
李 军 王冠勇 韦立登 鲁耀兵 胡庆荣
(北京无线电测量研究所 北京 100854)
1 引言
随着干涉合成孔径雷达(Interferometric Synthetic Aperture Radar,InSAR[1,2])技术的不断发展和完善,已逐渐从工程样机研制走向专业应用化推广。尤其是InSAR全天时、多天候的载荷特点,对气象条件依赖因素较小,使其成为有别于常规航空摄影测量、激光测量等技术手段的新型测绘装备,可广泛运用于我国西南多云雨省份的高精度地形测绘,具有广阔的市场应用前景,引起了世界各国的高度关注和重点研究[3-5]。2000年美国搭载“奋进号”航天飞机完成了名为航天飞机雷达地形测绘使命(Shuttle Radar Topography Mission,SRTM)的雷达测绘计划,实现了地球南北纬60°范围以内的陆地测绘,体现了星载雷达测绘的高精度和宽覆盖[6]。欧盟随后也提出了TerraSAR-X和TanDEMX测绘雷达研制计划[7,8],利用3年时间获取了高精度连续的全球数字高程模型(World Digital Elevation Model,WorldDEM)。数据库于2014年投入使用,较SRTM测绘精度大幅提升,数据网格分辨率为12 m×12 m,相对高程精度优于2 m,并且测绘产品输出类型也更为丰富[9-12]。
星载InSAR系统[13]受限于基线长度的设计约束,在1:5000或者1:2000等大比例尺地图测绘时,星载测绘手段当前时期内仍略显不足。机载InSAR在灵活性和高精度方面则占据一定的优势,各型有人、无人机载InSAR系统得到快速发展。传统机载InSAR系统一般采用L波段[14,15]或者X波段[16,17],如美国空军ER-2平台的DTEMS系统[18]、中科院电子所“奖状”平台的测绘雷达系统[19]等,在0.5 m高程测量精度约束下,雷达两部接收天线基线长度达到了8.5 m和2.4 m,需要对飞机结构进行特殊的加改装设计并重新适航,对飞机平台要求较高。常规低波段InSAR系统直接利用国内现有的运-12、塞斯纳等通航飞机仍面临较大的技术困难,而高频段InSAR系统[20]则可以利用基线较短的优势,降低对飞机平台的依赖性,从而提升飞机的适装性和普适性。相位解缠是InSAR面对的另一个难题,多基线InSAR系统[21]由于良好的相位解缠绕能力,其系统设计[22]及数据处理[23-27]近年来逐渐受到广泛关注。
本文介绍了一种新颖的毫米波多基线InSAR系统,多部雷达天线统一集成在单个雷达吊舱内,可适装多种飞行平台,其中吊舱内的长基线用于确保雷达测绘精度,而短基线可大幅度降低相位解缠绕难度。在SRTM低精度地形高程的辅助下,结合时域成像算法和高程反演近似方法极大提升了系统在山地、高山地等复杂地形的实用化程度。实测机载毫米波多基线InSAR数据处理结果与真实高程数据的对比验证了系统的测量精度及鲁棒性。
2 毫米波多基线InSAR设计思路及系统介绍
毫米波多基线InSAR的设计思路为针对国内现有通航飞机平台的结构和电气接口,设计一款具备多种不同基线且集成在单个吊舱内的高精度InSAR系统,适装不同的飞机平台,适应山地、高山地等复杂的地形环境,全域条件下测绘精度满足1:5000比例尺测图要求。由于InSAR系统的干涉基线配置和雷达工作频率对测高精度具有较大影响,这里主要对两种因素展开讨论。
2.1 InSAR干涉基线长度及雷达频率选择
InSAR测高误差项中基线长度导致的高程误差为[28]

其中,R为雷达斜距,ϑ为雷达下视角,ξ为基线倾角,B为干涉基线长度,ΔB为基线长度测量误差,则有效干涉基线长度为Bcos(ϑ-ξ)。InSAR基线设计可采用两个独立的天线吊舱分别挂置在飞机机翼两侧形成干涉基线(简称分置式吊舱),也可采用单个吊舱内部集成多部天线形成干涉基线(简称一体化吊舱),如图1所示。
分置式吊舱将多个天线吊舱分别挂载在飞机两侧机翼的下方,或者根据需要设置在机翼下和机腹下。此方式可以最大化利用机身结构,形成长基线,干涉精度高,但对飞机结构改装要求相对较高。一体化吊舱则在单个吊舱内部集成多部雷达天线,结构集成度高,飞机易安装,但基线长度较短,不易实现高精度测高,但通过基线倾角的设计可弥补高程精度的不足。一体化吊舱由于对飞机结构改装小,可安装于小型民用通用航空飞机平台,工程实现和应用飞行试验难度相对较低,近年来受到测绘行业的重视。
根据式(1)可以对比不同基线配置对InSAR高程测量精度的影响。表1分别对比了1.8 m基线的分置式吊舱与0.3 m基线的一体化吊舱在不同入射角ϑ情况下的测高误差,其中载机飞行高度按照通航非气密飞机的正常作业相对航线高度3000 m计算,分置式吊舱和一体化吊舱基线倾角ξ设置为45°,基线长度测量误差ΔB均设置为0.1 mm。
由表1可知,在入射角30°~60°范围内,一体化吊舱0.3 m短基线通过基线倾角的设计可具有较高的高程测量精度。短基线使得一体化吊舱尺寸小,大幅度降低了干涉雷达系统所需的结构外形包络,并且可以避免柔性基线问题,便于后续多载机适装和大规模业务化运行。

图1 InSAR天线吊舱不同结构配置对比示意图Fig.1 A comparison diagram of different configurations of InSAR antenna pod

表1 不同基线配置对InSAR高程测量精度影响对比Tab.1 Comparison of effects of different baseline configurations on InSAR elevation measurement accuracy
InSAR高程测量误差中,雷达中心频率的影响主要体现在干涉相位误差项中,干涉相位误差ΔΦ对测高的影响为[28]

其中,λ为雷达波长。假设干涉相位误差相同,在相同基线配置参数下,雷达波长越短,测高误差越小,反言之相同精度条件下雷达波长越小,所需的基线长度越短。例如,相同条件下Ka波段(波长8 mm)较X波段(波长3 cm)干涉基线长度可以减少至1/3,大幅度降低了系统体积和工程实现难度。
2.2 InSAR多基线长度设计
InSAR利用相位反演高程,长基线对高程敏感但易发生相位 2π模糊,短基线对高程不敏感但高程测量精度较差,实际工程设计时需要对多基线配置开展详细分析。不同基线长度对应的模糊高程为[28]

即高程误差h ∈[-HAmb/2,HAmb/2)时,干涉相位Φ ∈[-π,π),相位未发生模糊,表2分析了3000 m航高下不同基线长度对应的模糊高程。
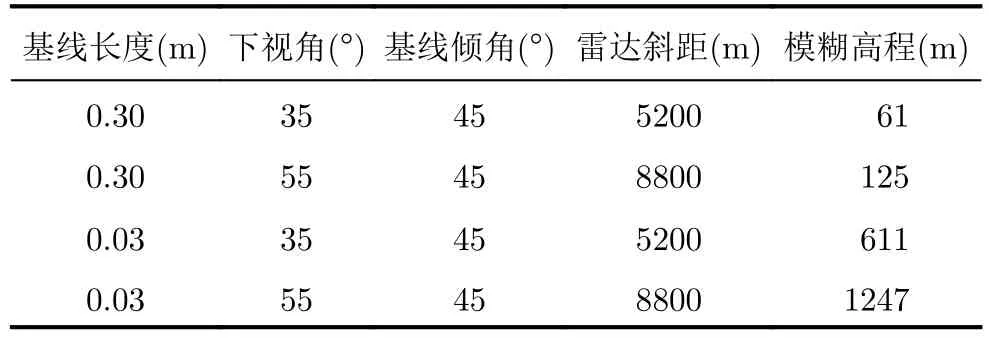
表2 InSAR不同基线长度对应的模糊高程Tab.2 Fuzzy elevation corresponding to different baseline lengths
由表2可知,InSAR基线越短,模糊高程越大,但测高误差大。InSAR基线越长,模糊高越小,但测高精度高。设计长基线长度BL时,应综合考虑式(1)和式(2)的要求

其中,ΔHBL为长基线的高程测量精度。在干涉相位不模糊的约束条件下,短基线对地形高度起伏的适应能力越强,后续干涉相位解缠绕处理难度越低,但短基线将导致干涉高程测量误差增加。假设干涉相位误差ΔΦ服从N(µ,σ2)的正态分布,若短基线测高误差峰峰值大于长基线的模糊高,则无法进行正确的长基线解模糊,为了避免这个问题,按照正态分布特性一般选择短基线长度BS为

其中,HAmb_BL为长基线的模糊高程。长基线长度BL需要根据系统最终的测高精度进行综合选择。一般多基线InSAR成像过程中还会引入SRTM或TanDEM-X数据源作为初始参考高程,初始参考高程与地物实际高程之间还存在一定的误差Δhinput,为了避免参考高程误差导致短基线相位模糊,短基线长度BS还需要同时满足:

需要说明的是,除上述多基线设计约束外,为了降低干涉相位解缠绕的复杂度,还应确保长短基线干涉相位图中每一像素点相位模糊不同,即长基线相位折叠位置与短基线相位折叠位置不同。
3 基于时域成像算法的InSAR高程测量
常规频域SAR成像算法的成像平面一般为斜平面,InSAR后期处理中还需要影像配准和平地相位去除,处理较为复杂,且已知的地形信息利用率不高。而基于时域后向投影的SAR成像算法[29,30]可以充分利用先验地形信息,将成像平面定义为地平面,大大降低了InSAR处理的难度。随着GPU的技术发展[31],时域算法面临的大规模运算将得到有效解决,基于时域成像的InSAR处理技术近年来得到了广泛关注[32,33]。
假设两个雷达接收天线A1,A2物理间距为B,基线倾角为ξ,目标点为P,真实高度为h1+Δh,在地距位置为y0,目标与雷达天线之间的距离分别为R1,R2。实际成像过程中,目标真实高度未知,目标点先验信息高度为h1,高度误差为 Δh,雷达高度为H,目标下视角为θ。基于BP成像的InSAR几何模型如图2所示。
BP成像时,利用先验地形信息建立成像网格,目标点P在等距离成像面内投影至P1点,这里R1等于,地距点由y0变化至y1点,为了确保目标点P在天线A2内也投影至P1点,需满足R2在先验地形内的地距投影也为y1,即

展开得

其中,c os(θ+Δθ)=(H -h1-Δh)/R1,δR为距离分辨率,Δθ为高程误差引起的下视角误差。基线越长,其投影误差越大。图3对比了长短基线In-SAR不同天线的地距投影误差,其中绿色虚线表示偏移1/10个像素对应的地距误差约束条件。
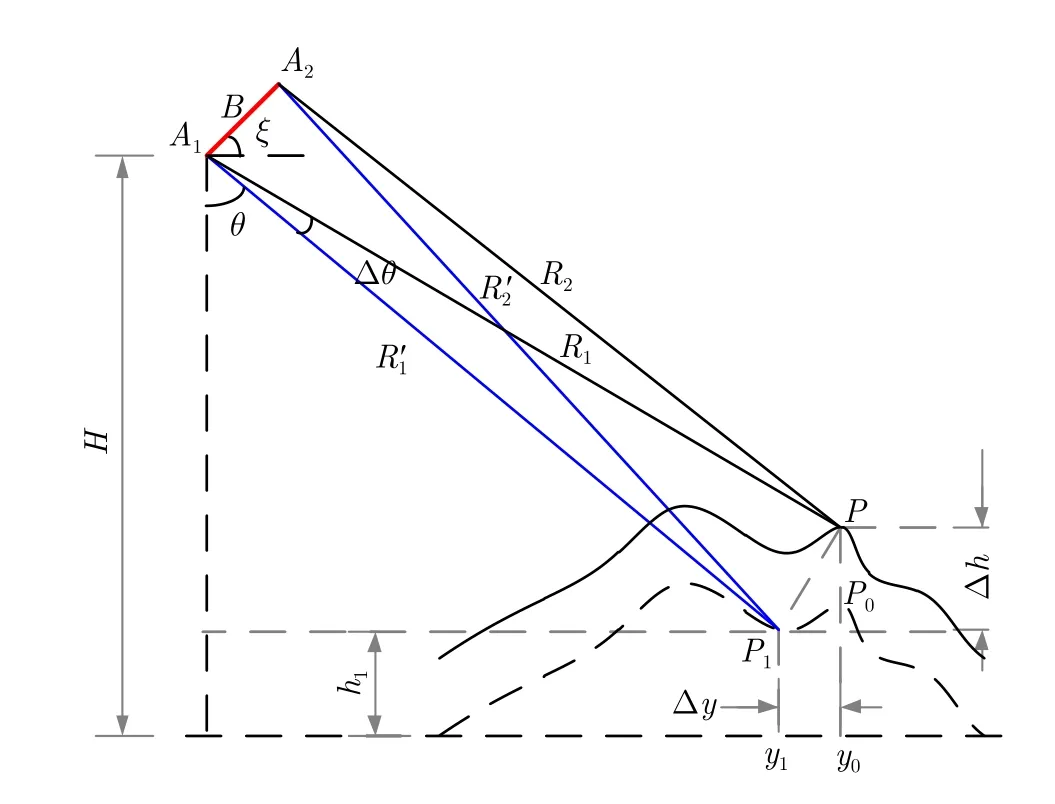
图2 基于BP成像的InSAR测高模型Fig.2 InSAR height measurement model based on BP imaging
由图3可知,短基线InSAR成像时不同天线投影在相同地距位置,像素偏移量可以忽略,但对长基线而言高程误差大于100 m时需要考虑地距偏移影响,体现在SAR图像中表示为像素点的偏移,对应干涉相位的损失。实际数据处理时可利用短基线测高信息对长基线进行二次处理,校正高程误差导致的地距偏移。假设目标点在两个天线成像时投影至相同地距位置,基于BP成像的InSAR干涉相位可表达为
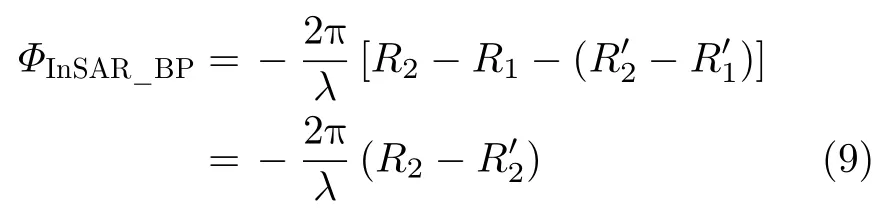
其中,

则干涉相位可简化表示为
转化为高程误差为

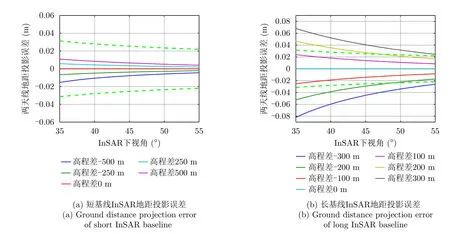
图3 长短基线InSAR的地距投影误差对比Fig.3 Comparison of ground distance projection errors of InSAR with long and short baselines
理论上通过式(11)和式(12)即可求解目标点高程,但由于长基线InSAR干涉相位ΦInSAR_BP中是存在模糊的,需要利用短基线求解长基线的干涉相位,从而获得精确的地物高程。具体步骤为

将式(13)带入至InSAR相位表达式(11)中,可以得到短基线干涉相位ΦInSAR_BP_BS与高程误差 Δh近似关系为

步骤 2构建长基线补偿相位项。同一像素点,长短基线除基线长度不同,其余项均可近似相同,此时可构建长基线的补偿相位为

步骤 3长基线相位校正。长基线干涉相位中去除补偿相位项,得到无模糊的相位

步骤 4长基线相位逆校正。对去除模糊的长基线进行干涉相位滤波并加上补偿相位得到最终的长基线干涉相位

步骤 5求解目标点的高程误差。按照干涉相位与高程误差的精确公式,计算目标点最终的高程误差。
4 毫米波多基线InSAR数据处理流程
毫米波InSAR数据处理结合外部数字高程模型(Digital Elevation Model,DEM)数据,在3维地形网格上构建成像平面,利用后向投影算法分别对长短基线开展SAR成像,短基线InSAR经干涉和滤波、解缠绕处理后得到低精度的地形高程,长基线InSAR在低精度高程的基础上开展几何校正,在干涉和相位滤波处理后,叠加短基线补偿相位消除长基线相位模糊,相位解缠绕处理后叠加短基线补偿相位得到最终的干涉相位,经相位转化后获得精确的地物高程。毫米波多基线InSAR数据处理流程整理后如图4所示,其中灰色部分为外部参数输入。
5 实测数据实验
下面利用实际的毫米波多基线InSAR系统,搭载有人飞机平台,并在地面布设三面角角反射器和全球导航卫星系统(Global Navigation Satellite System,GNSS)地面基准站,验证本文算法的可行性和有效性。毫米波多基线InSAR系统参数如表3所示,搭载的有人机飞行平台及毫米波多基线In-SAR系统雷达吊舱实物图如图5所示。
飞行试验地点为河南省安阳市,图6(a)为观测区域的GoogleEarth光学影像图,图6(b)为观测区域的SRTM参考高程数据,图6(c)和图6(d)分别为基于3维地形网格的不同通道SAR成像结果。图6(e)和图6(f)分别为长基线和短基线的干涉相位图,可以看出短基线干涉相位基本没有模糊,长基线干涉图局部区域仍存在一定的模糊,图6(g)为长基线经过短基线相位校正后的干涉相位图,可以看出长基线经短基线校正后相位未模糊,说明短基线可作为一种辅助手段降低相位解缠绕和高程反演的难度,图6(h)为长短基线联合处理后的高程测量图,与图6(b)比较可以看出,其区域高程细节明显丰富,高程精度提升。
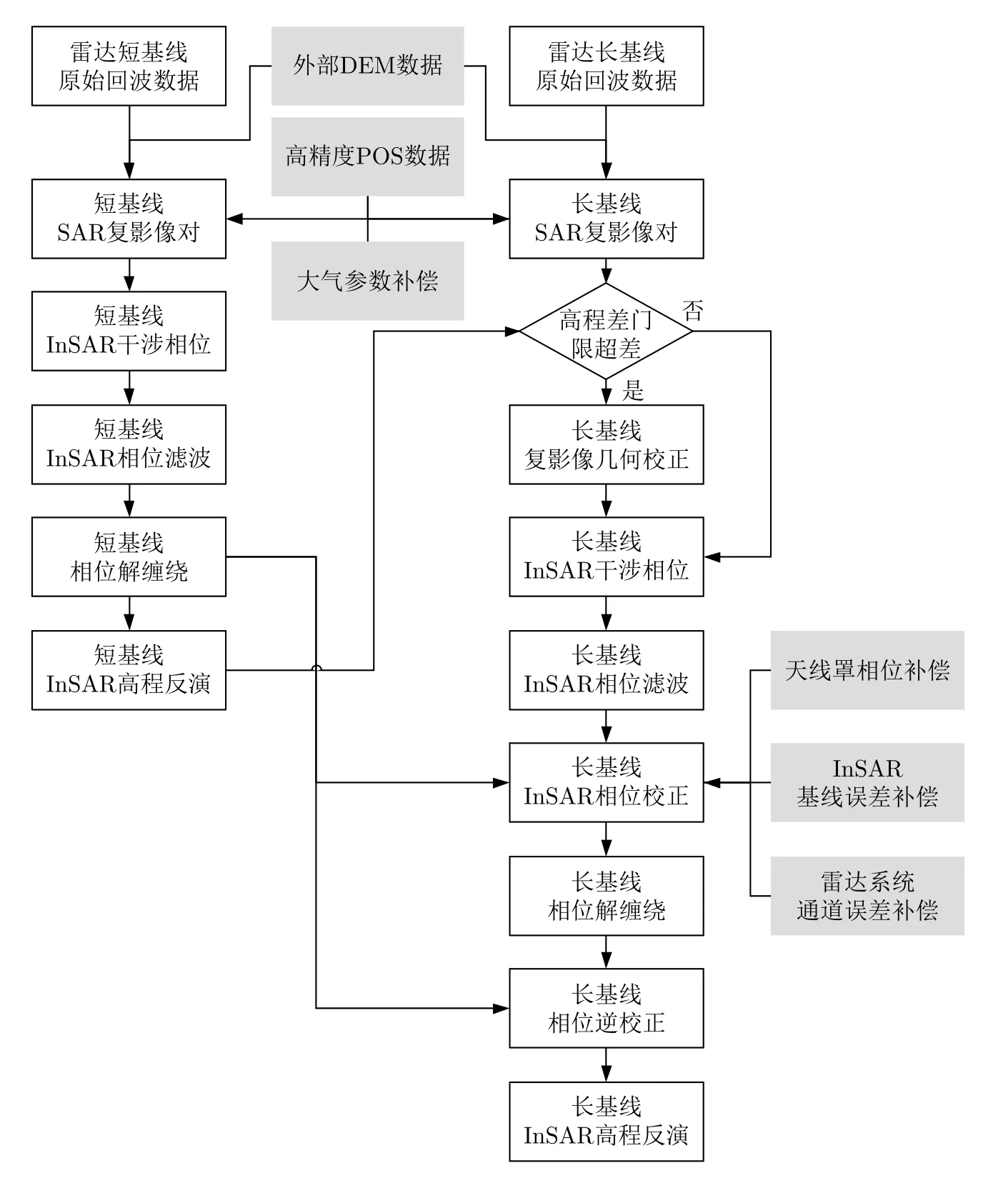
图4 毫米波多基线InSAR数据处理流程图Fig.4 Flowchart of millimeter-wave multi-baseline InSAR data processing
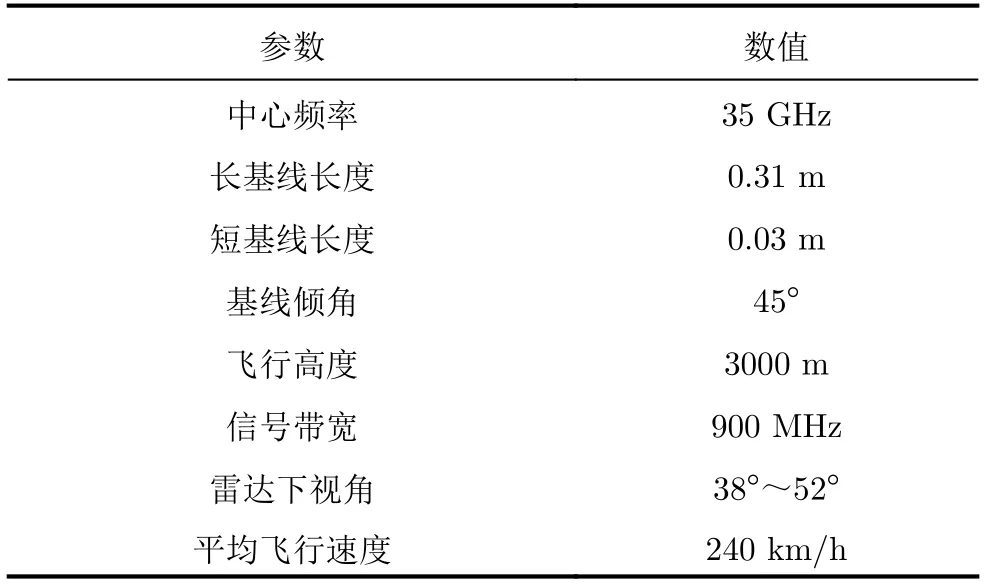
表3 毫米波多基线InSAR系统参数Tab.3 Parameters of millimeter-wave multi-baseline InSAR system
为了说明本文所提出的基于一体化天线吊舱的毫米波多基线InSAR系统及干涉数据处理方法在测绘作业中的可行性,下面给出了InSAR测绘高程与真实高程数据的对比结果。图7(a)为由光学雷达(Light detection and range,Lidar)测得的测区高程数据,图7(b)为经过干涉数据处理后的测区DSM结果。为了对测绘结果进行量化说明,在飞行测区内布设了68个角反射器作为检查点,角反射器的分布如图7(a)所示,其中共有34个指向南向,34个指向北向。后通过GNSS差分测量出角反射器的3维位置信息(精度约5 cm),以此作为基准对本文多基线InSAR系统的性能进行分析。从上述角反射器中去除地物遮挡和角反指向等引起的角反异常值,对剩余的25个角反射器进行分析,画出基准高度与InSAR测高结果如图8(a)所示,测高误差结果如图8(b)所示。由图8可知,毫米波多基线InSAR系统测量的高程与高程基准的误差均值为0.0495 m,标准差为0.1732 m,误差峰峰值为0.6331 m,可以满足测绘作业1:5000比例尺的高程精度要求。

图5 毫米波多基线InSAR装机及天线结构图Fig.5 Millimeter wave multi-baseline InSAR installation and antenna structure diagram
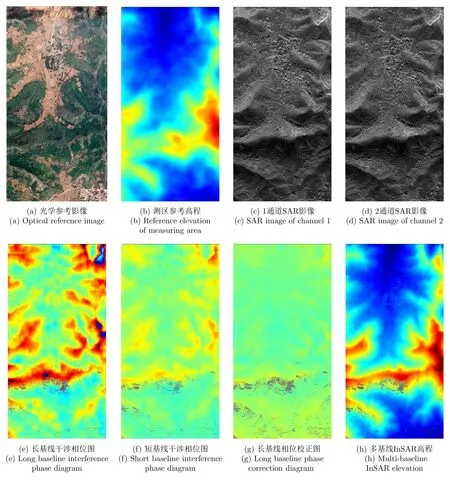
图6 毫米波多基线InSAR实测数据处理结果Fig.6 The measured data processing results of millimeter-wave multi-baseline InSAR
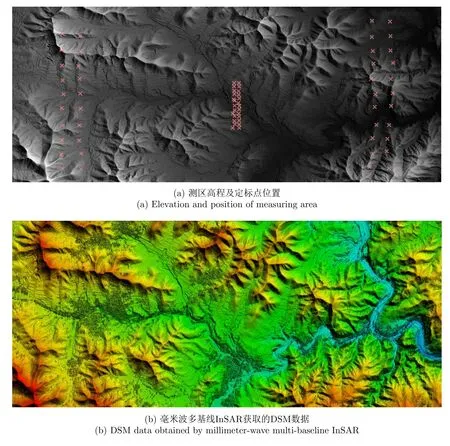
图7 毫米波多基线InSAR处理结果Fig.7 Results of millimeter-wave multi-baseline InSAR treatment
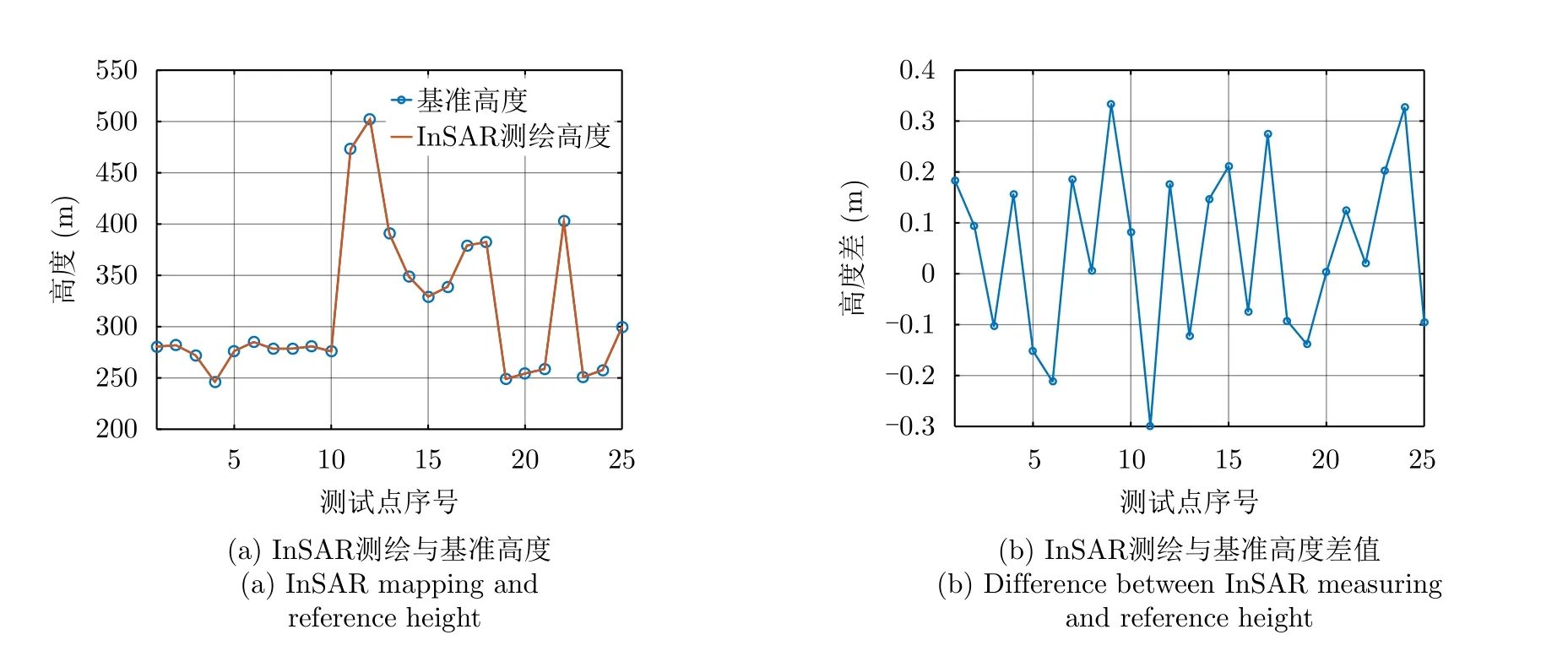
图8 InSAR测绘高度与基准高度对比结果Fig.8 Comparison results between the measured height and the reference height
6 结束语
本文提出了一种针对轻小型化飞行平台的毫米波多基线InSAR测绘技术,结合外部参考地形和时域后向投影算法,优化了多基线InSAR的处理流程。通过实测数据的处理,验证了毫米波多基线InSAR雷达测绘技术的有效性和可行性,为后续工程实用化提供了基础。在实际飞行中发现,多基线InSAR应用中仍存在雷达天线罩传输不一致性导致的非线性测高误差、参考地形导致的伪叠掩等应用性问题,将是下一阶段工作的研究重点。