基于H6和QPR控制的新型光伏并网逆变器
2020-01-13任一峰卫芃毅
栾 天, 任一峰, 安 坤, 郭 睿, 卫芃毅
(中北大学 电气与控制工程学院,太原 030051)
引 言
单极性正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)下的全桥电路,拥有并网滤波电感小和直流电压利用率高等优势,应用较为广泛,但是采用单极性的SPWM调制有高频脉动的共模电压,从而产生共模漏电流。本文设计了新型H6桥结构,可以使得逆变器的共模电压在各个工作阶段保持恒定,从而抑制共模漏电流的产生。新型H6桥结构在全桥电路的基础上给两个桥臂各加一个绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT),并将两个桥臂相连。这样单桥臂上的两个管子在工作时不能同时导通,起到改善输出电流质量的作用,基本做到消除共模漏电流[1]。
共模漏电流被抑制后,逆变器性能的主要影响因素就是入网电流控制。目前市场上普遍使用的PI控制,其结构简单,应用广泛。但PI控制对交流给定信号无法实现无静差跟踪。文献[2]中介绍的重复控制通过一个周期的延时来实现,使得控制器的动态响应变慢;文献[3]中介绍的模糊PID控制可以实现较好的鲁棒性,但是由于控制算法实现的功能不同,存在差异大并且算法复杂等缺点;文献[4]中介绍了4种设计方案的PI控制,各自都有优点,但是不能消除PI控制抗干扰性差的问题。文献[5]中介绍的无差拍控制可以基本实现并网,但是此控制方式对数学模型要求较高,系统鲁棒性优化较难。本文设计在比例谐振(Proportional Resonance,PR)控制的基础上,提出对PR控制改进成准比例谐振(Quasi Proportional Resonance,QPR)控制,对于改进后的QPR控制,其不仅涵盖了PR控制的优点,并且提高了电网电压的抗扰动能力。
1 H6桥光伏并网逆变器
单相H6桥结构如图1所示。图中:C1为直流侧母线电容;Ug为电网电压;LA、LB为滤波电感;C0为滤波电容。由图1可知,较文献[6]中介绍的目前市场上普遍使用的H6拓扑结构,本文设计的光伏逆变器拓扑H6电路的结构将两个二极管移除,并在控制策略上进行完善,使其能够有效消除共模漏电流[7],处理无功功率。
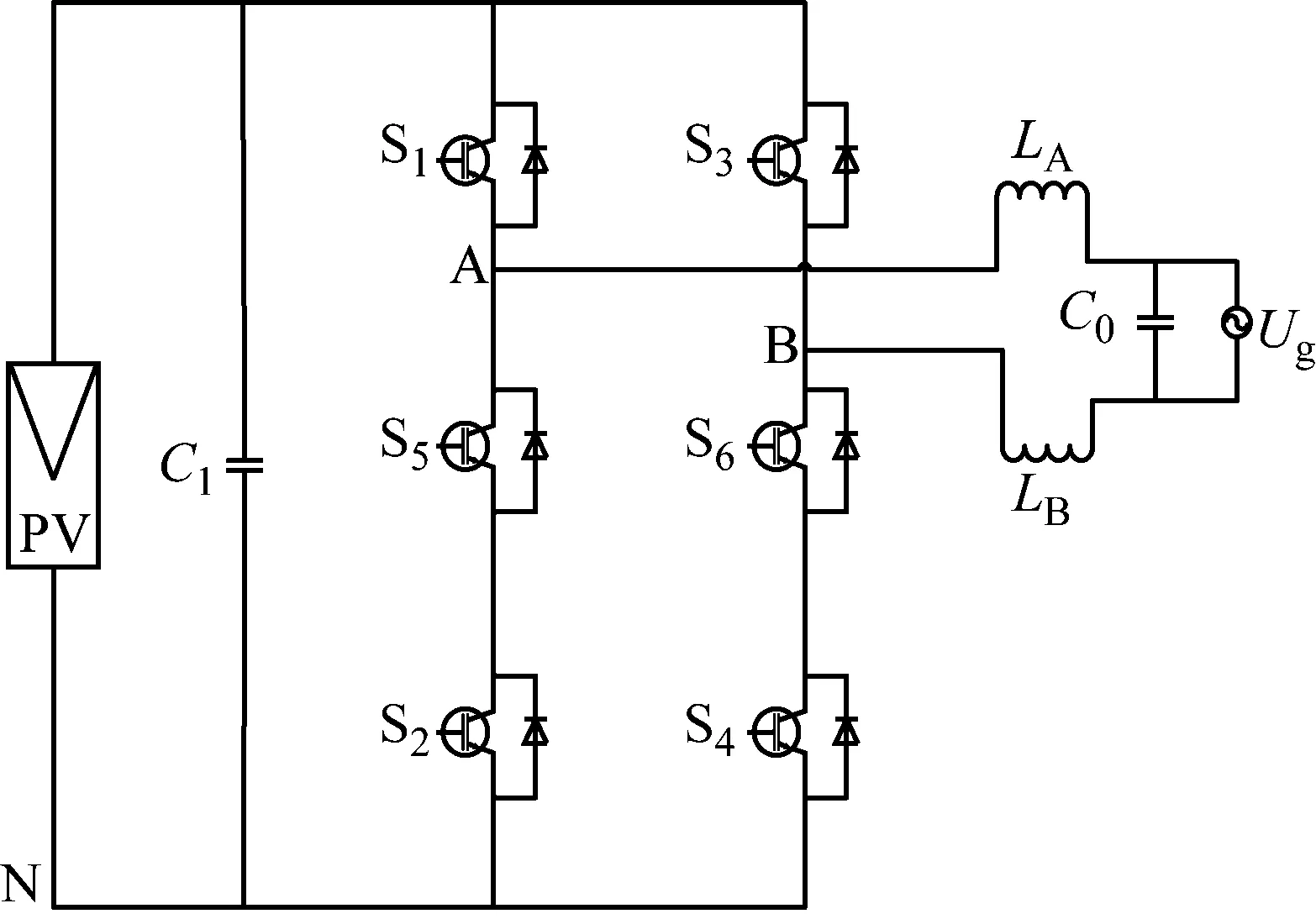
图1 H6逆变桥主电路结构
H6逆变器各功率管驱动波形如图2所示。
采用单极性调制方式,在一个完整的工作周期中,逆变器共有6种工作状态:①在正半周期时,S6一直处于开通状态,IGBT管S1和S4通过触发信号同时开通,其余管关断,输出电流流过S1、滤波电感电容、电网、S6和S4。则UAN=UPV,UBN=0,共模电压UCM=(UAN+UBN)/2=0.5UPV。②S1和S4关断,电流通过S5的反并联二极管、滤波电感、滤波电容、电网、S6,则UAN减小UBN增加直到二者量值完全相等,因此UAN=UBN=UPV/2,共模电压UCM=(UAN+UBN)/2=0.5UPV。③在正半周期的负功率阶段,S2、S3和S5导通,电流通过S2、S3和S5的反并联二极管后减小,则UAN=0,UBN=UPV,共模电压为UCM=(UAN+UBN)/2=0.5UPV。④在负半周期内的正功率段,IGBT管S2、S3和S5导通,S6关断。电感的电流逆向增加,则UAN=0,UBN=UPV,共模电压UCM=(UAN+UBN)/2=0.5UPV。⑤S5和S6导通,S2和S3截止,电流通过S6的反并联二极管、滤波电感、滤波电容、电网和S5后减小,UAN增加UBN减小直到二者量值完全相等,因此UAN=UBN=UPV/2,共模电压UCM=(UAN+UBN)/2=0.5UPV。⑥在负半周期内的负功率阶段,IGBT管S1、S4和S6导通,电流通过S1、S4和S6的反并联二极管后减小,则UAN=UPV,UBN=0,共模电压UCM=(UAN+UBN)/2=0.5UPV。
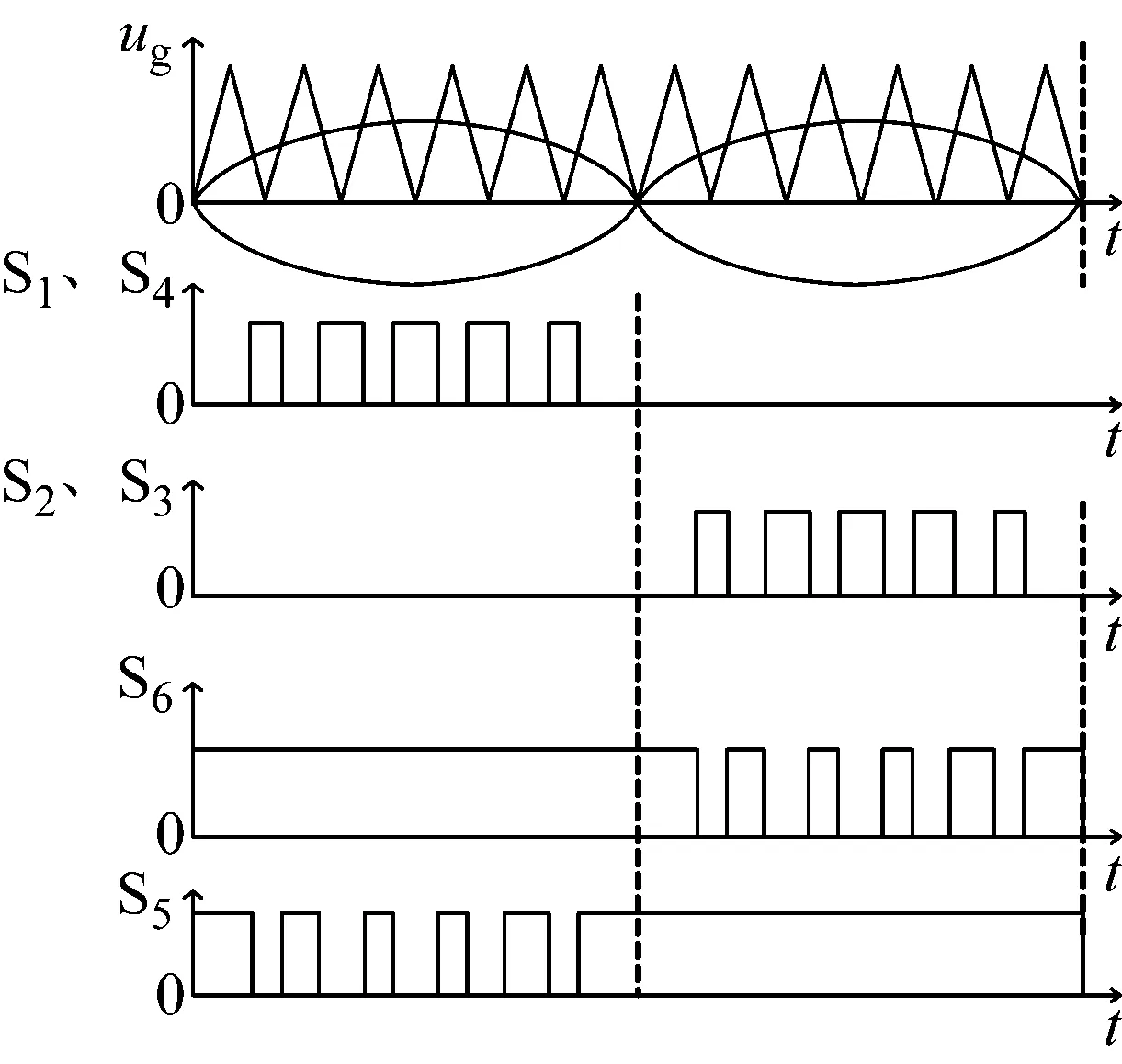
图2 H6逆变驱动波形
UPV为直流母线电压,UAN为A点对地点的电压,UBN为B点对地点的电压。此6开关结构逆变器在6种工作状态运行时,共模电压均为UCM=(UAN+UBN)/2=0.5UPV,基本保持不变,因此可以有效抑制共模漏电流。
2 并网控制模型建立
2.1 逆变系统结构双环控制方案
H6结构双环控制框图如图3所示。
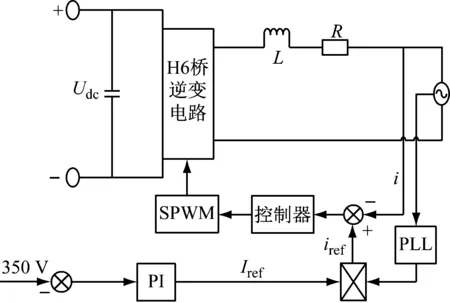
图3 H6结构双环控制框图
光伏并网逆变器采用双闭环控制,外环实现直流母线电压控制,将给定的直流母线电压与设定电压350 V进行比较,差值经控制器调节后输出给定电流的幅值Iref。通过锁相环实现对电网电压相位与频率的捕获,得到给定电流iref;内环主要实现的是将并网电流i和给定电流iref的差值经过控制器得以调节,将所得的波形与三角波比较后用于产生SPWM波。SPWM信号放大后经过功率管,作用于H6桥逆变器开关管,经过滤波电路并入电网[8]。
2.2 电流内环控制器的设计
PR控制即将一个无损谐振环节加入调节器中,从而使得控制器在谐振频率处可以有无穷大的增益,通过这一方法消除系统的稳态误差。本系统的谐振频率为50 Hz,PR控制的传递函数[9]为:
(1)
PR控制在理论上可以完全抑制电网电压对输出并网电流的影响,但在实际工程中,电网电压的频率不是稳定不变的,在电网电压产生误差和偏移时,PR控制器的性能则会大幅降低,此算法就无法完成快速精确的追踪,需要对其进行改进,降低在谐振频率处的敏感度和高增益特性,以利于系统的实现。可将PR改进为QPR控制,其传递函数[9]为:
(2)
式中:KP为QPR控制器的比例系数;KR为谐振系数;ω0为基波频率;ωc为截止频率。
为保证电网频率波动时QPR控制器有足够大的增益,假设允许波动范围为50±0.5 Hz,即带宽d=2×0.5=1(Hz),取ωc=π×d=3.14(rad/s),同时取KP=2.5,KR=50,ω0=314 rad/s,绘制QPR控制器的Bode图如图4所示。
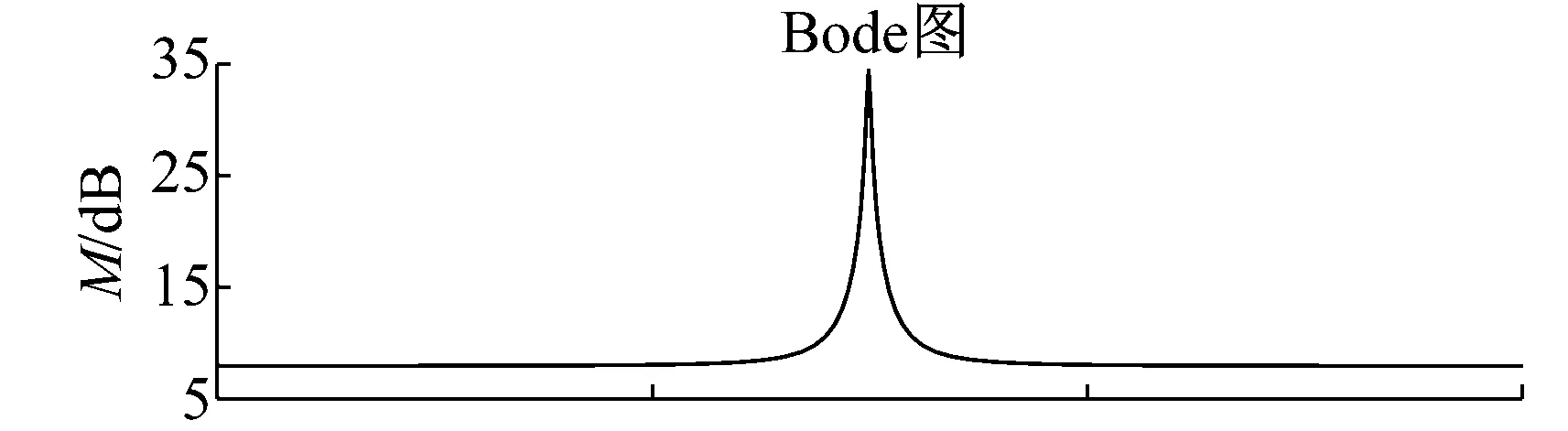
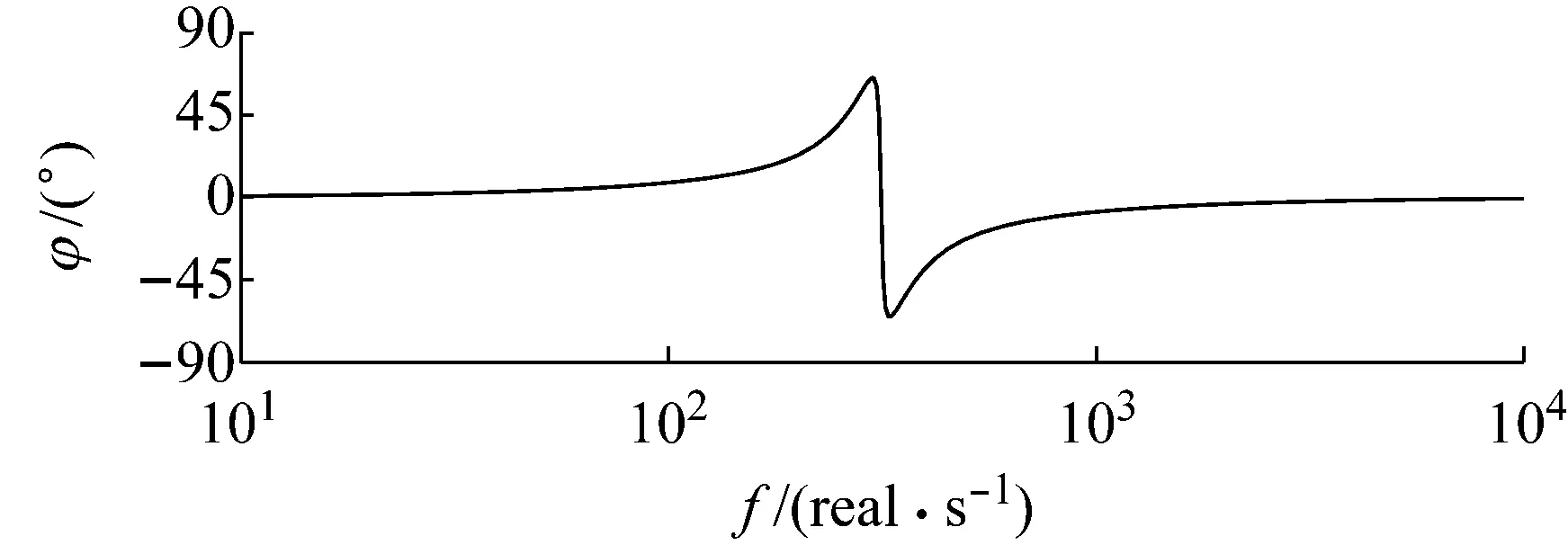
图4 QPR控制器的伯德图
2.3 QPR控制算法
基于QPR控制并考虑电网电压扰动的系统结构框图如图5所示。

图5 基于QPR控制和电网电压干扰下的系统结构框图
由图5所示系统结构框图,运用齐次定理,并比较式(2)可知:
(3)
由式(3)可得,QPR控制器在基波频率ω0处的幅频特性为:
AQPR(ω0)=KP+KR
(4)
根据式(4)可知控制增益为有限值,相比于PI和PR控制在基波频率ω0处的增益,QPR控制器在基波频率处的增益有适当的增加[10],抑制稳态误差的能力明显提升。
选取PI控制器、PR控制器、QPR控制器的各参数为KP=2.5,KI=KR=50,ωc=3.14 rad/s,ω0=314 rad/s,将3种控制器的传递函数绘制在同一Bode图中,如图6所示。
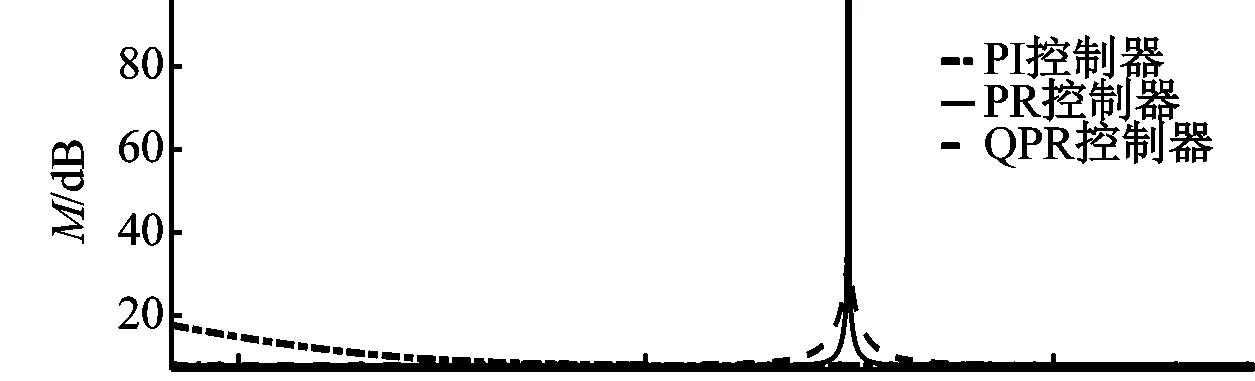
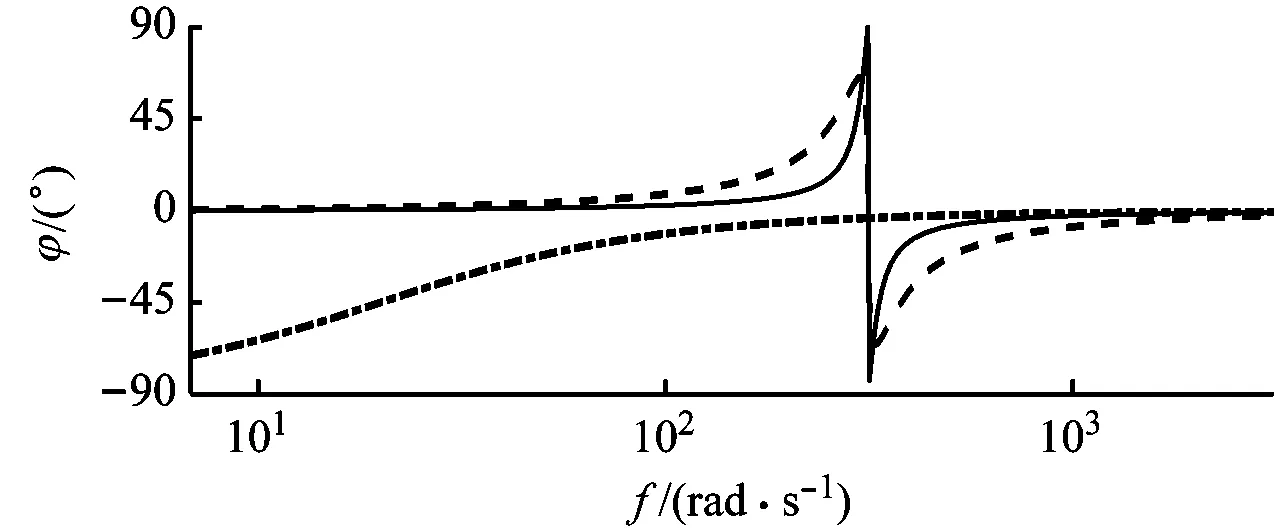
图6 三种控制器的伯德图
由图6可知,在基波频率左侧的低频段,PR(实线)和QPR(虚线)控制在抑制电网电压的干扰信号效果上基本相同,PI(点划线)控制在这一阶段对干扰信号的抑制性能明显高于PR和QPR控制;在基波频率右侧的高频段可以看出3种控制方式对电网电压干扰信号的抑制效果基本一致[11];在基波频率处,PR控制对闭环扰动的衰减增益可以达到80 dB,其衰减电网电压的干扰信号能力最强;准PR控制的闭环扰动衰减增益约为35 dB,PI控制相较QPR控制更低,因此就基波频率处扰动信号衰减增益相比较,PR控制和QPR控制都具有显著的优势。但是对QPR控制器而言,其牺牲了部分基波频率处的增益,换取了相比PR控制器更宽的带宽[12],即如果在基波频率处发生了偏移,增益也可以相对保持稳定。总得来说,QPR控制在抗电网电压干扰上相比于PI、PR控制效果更佳。
设计稳定性和抗干扰性最佳的QPR控制器即要设计其各项参数:ωc的选择取决于电网频率允许的波动带宽[13];KP的选择取决于控制器对于比例增益和谐波阻抗的要求;KR的选择取决于控制器对基波频率出的增益要求。
3 仿真结果及分析
上述对QPR控制的研究,为了验证其能实现对电网电流的无静差跟踪,设计相关参数:逆变器增益K=400,比例系数KP=2.5,积分系数KI=100,谐振系数KR=50,截止频率ωc=3.14 rad/s。在Matlab/Simulink平台搭建了基于H6逆变桥的QPR控制仿真模型[14],运行得到结果,如图7所示的H6逆变桥输出并网电流波形。
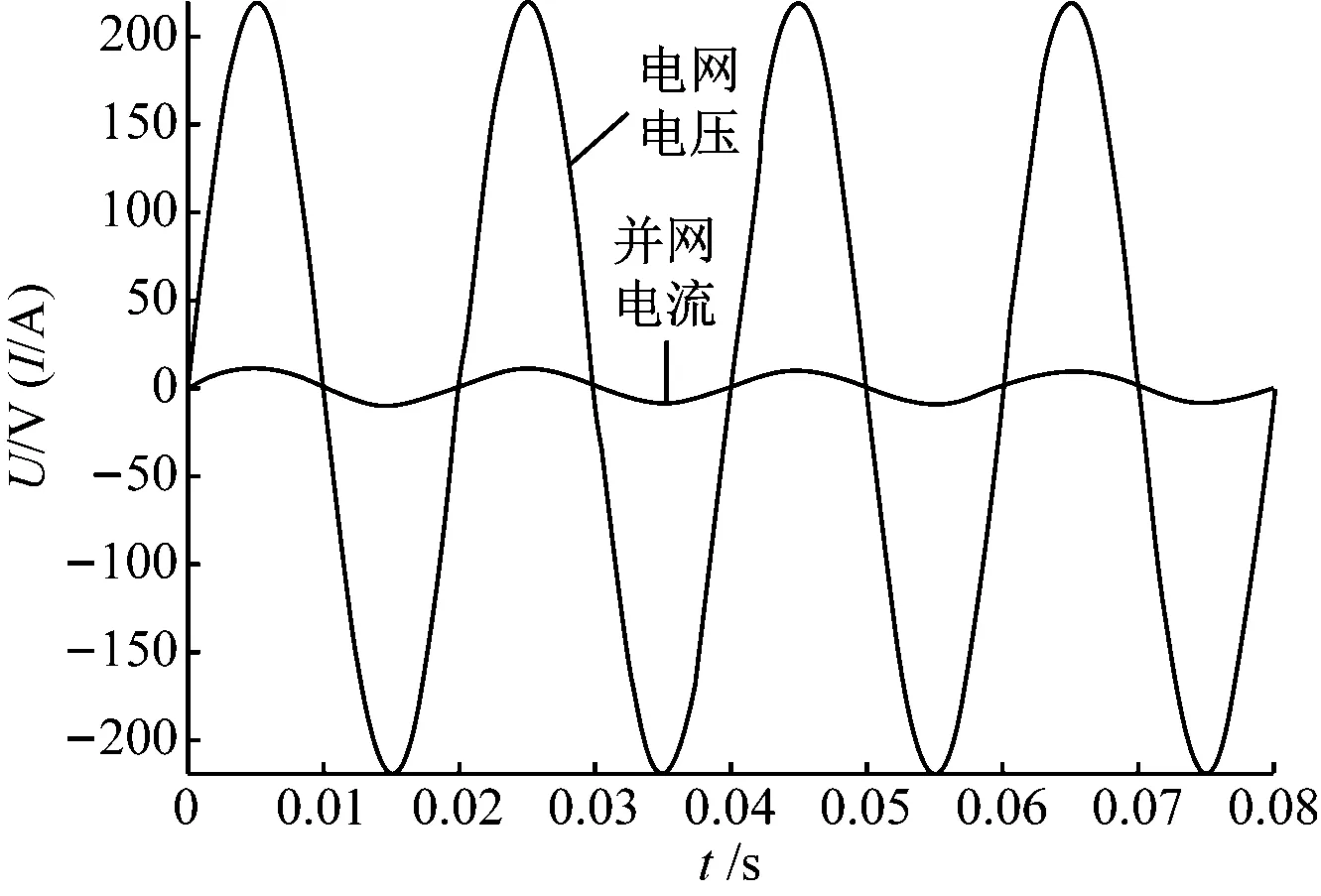
图7 输出并网电流波形
对基于QPR控制的输出电流进行FFT分析,分析结果如图8所示,得到总谐波畸变率(THD)为2.16%。
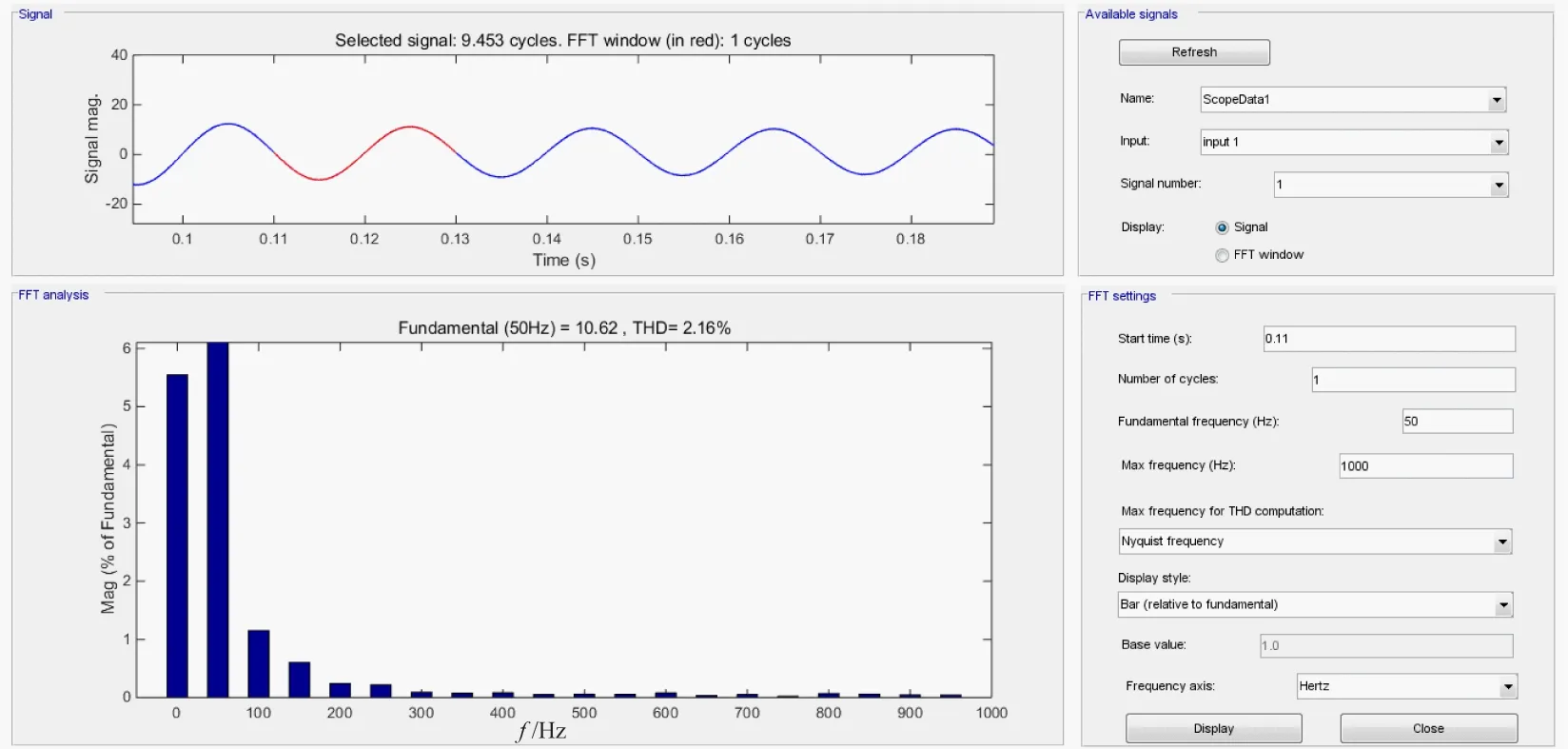
图8 基于QPR控制的输出电流FFT分析
QPR控制能够实现对电网电流的无静差跟踪,输出电能质量高;在电网频率发生小幅变化时,与PI控制、PR控制相比,QPR控制带宽更大,可以很好地适应电网频率的偏移。仿真结果与上述理论分析一致。
4 结 语
本文通过对新型H6结构逆变器设计了QPR控制策略,并对新的控制策略在H6结构的基础上进行了仿真,仿真结果证明:在基波频率附近,电网频率发生小偏移时,QPR控制可以保持足够大的衰减增益,拥有很强的抗干扰性。结合H6结构,有效的减小了并网电流的THD,消除了共模漏电流,提高了并网的质量。
