基于多片高性能DSP的主动声呐低速运动小目标探测系统
2020-01-08张舒皓马晓川
张舒皓, 马晓川, 杨 力, 詹 飞
基于多片高性能DSP的主动声呐低速运动小目标探测系统
张舒皓1,2, 马晓川1,2, 杨 力1, 詹 飞1,2
( 1. 中国科学院 声学研究所,北京, 100190; 2. 中国科学院大学 电子电气与通信工程学院, 北京, 100049)
自主水下航行器(AUV)等水下运动平台的主动声呐在浅海复杂环境工作时, 其性能容易被杂波造成的虚警影响, 难以完成对低速小目标的探测。针对这一问题, 探测系统采用了具备杂波抑制能力的二进制相移键控(binary phase shift keying, BPSK)波进行目标探测。但BPSK波多普勒敏感、速度容限小、易失配, 需要大量的副本覆盖检测范围, 处理过程计算量大。为了解决这一问题, 文中采用6片高性能数字信号处理器(DSP)芯片构成的信号处理机, 设计了与硬件平台适应的处理算法, 并对软件进行了实时性优化。经过实时性测试, 该系统可在160 ms内完成发射脉宽200 ms的BPSK波1帧回波数据的实时处理。湖试试验中, 该系统可检出预先布置在1 360 m处, 航速1 kn, 目标强度3 dB的应答器。试验结果表明, 该探测系统可在复杂水下环境实时有效探测低速小目标。
自主水下航行器; 主动声呐; 数字信号处理器芯片; 波形设计; 目标探测; 杂波抑制
0 引言
自主水下航行器(autonomous undersea vehicle, AUV)、无人遥控航行器(remotely operated vehicle, ROV)的广泛应用使滨海设施受到越来越大的安全威胁, 对其探测的需求也愈发紧迫。AUV、ROV、蛙人等水下入侵目标具有体积小、航速慢、自噪声低、隐蔽性强的特点, 使港口、近岸水面船只和滨海军事区域的安全受到威胁[1]。由于以上特点, 被动声呐难以对这些目标进行有效监测, 需要使用高频主动声呐对其进行探测[2], 而频率较高的主动声呐由于海水的吸收作用, 探测距离较近[3], 为了克服这一难题, 可采用多个AUV等水下机动平台搭载高频主动声呐, 进行分布式搜索, 以扩大搜索区域, 增强探测能力。
使用AUV作为搭载平台, 其体积空间较小、携带能源有限, 使得有效载荷的体积、质量和功耗均受到较大限制, 因此, 对主动声呐探测系统提出了结构紧凑、质量轻、探测能力强等要求。杂波主要由水下散射体(如浅海环境中的礁石、人工设施和鱼群等)的回波造成, 与发射波形具有较强的相关性, 易造成虚警, 影响主动声呐的探测性能[4]。主动声呐探测强混响多杂波环境条件下的低速运动小目标时, 要求声呐系统发射的波形及检测方法具有抗混响和抗杂波的能力[5]。Yang[2]、Colin[6]、Doisy[7]等学者提出采用多普勒敏感波形来抑制杂波、提高主动声呐在复杂水下环境中对低速目标的探测性能。多径、水体波动等因素引起的信道模糊效应将导致多普勒扩展现象, 影响低速目标的探测[8]。多普勒容限较大的波形, 对速度覆盖范围内的目标和杂波都有较大的匹配滤波输出, 容易导致虚警。诸如二进制相移键控(binary phase shift keying, BPSK)等多普勒敏感波形, 仅对其速度容限范围内的目标具有较高的匹配滤波输出, 而对容限外的杂波失配, 使得回波中的杂波成分被抑制。Yang[2], 张驰[8]等的试验证实BPSK波在浅海中具有较好的杂波抑制能力。
多普勒敏感波形的速度容限较小, 易失配, 需要大量的副本来覆盖检测的范围, 对系统的计算能力要求较高[8], 在水下航行器主动声呐探测系统中采用多普勒敏感波形难度较大。文中选择多普勒敏感、具有较好的抗杂波性能和混响抑制能力的BPSK波。为了满足计算能力的需求, 采用6片数字信号处理器(digital signal processor, DSP)芯片并行的硬件架构, 设计适用于该硬件系统的波束形成和匹配滤波算法, 实现了AUV搭载的主动声呐系统对复杂水下环境中低速小目标的实时探测。
1 系统结构
硬件系统结构如图1所示, 6片TI公司的TMS320 C6455型DSP芯片集成在1块信号处理板上, 运行主频为1.2 GHz, 每片DSP峰值运算能力可达9 600 MMACS, 累计可提供高达576亿次定点计算能力。每片DSP外挂512 MB的第2代双倍数据率同步动态随机存取存储器(dou- ble-data-rate two synchronous dynamic random access memory, DDR2 SDRAM), 实现大容量的存储功能。DSP芯片之间采用Serial RapidIO总线实现高速数据通信, DSP芯片按照星型拓扑结构连接到Tsi578交换机芯片上, 每路x1型Serial RapidIO接口的传输速率达3.125 Gbps。信号处理板采用8位低电压差分信号(low-voltage differential signaling, LVDS)获取模数转换(analog to digital, A/D)芯片采集数据。板卡通过主机接口(host port interface, HPI)向发射机传输相应的BPSK波波形参数, 控制主动声呐波形的发射。

图1 硬件系统结构示意图
探测系统工作流程主要包括波形发射、回波接收、数据处理和目标检测等过程。波形发射由DSP完成发射参数计算后, 通过HPI对发射机进行设定, 之后发出使能信号启动发射机, 由声基阵将探测波形发射出去。回波接收由基阵将声信号转换为模拟电信号, A/D芯片将接收信号转换为数字信号, 通过LVDS传输给DSP。数据处理过程主要包括波束形成和匹配滤波2个阶段, 采用多片DSP并行计算, 实现实时处理。
2 接收信号处理

2.1 频域宽带DFT波束形成
对于宽带BPSK信号, 采用频域DFT波束形成进行处理。首先采用DFT变换将接收到的通道原始数据变换到频域, 得到多个窄带频谱分量, 然后对这些频谱分量分别进行窄带波束形成, 最后将所有的窄带波束形成结果按照功率相加, 合成为综合的宽带波束形成结果, 如图2[9]所示。

图2 离散傅里叶变换宽带波束形成器




探测方向范围覆盖±55°, 分别在–50°, –40°, …, –10°, 0°, 10°, …, 40°, 50°共进行11个方向的波束形成。
2.2 频域数字匹配滤波



图3 频域匹配滤波处理示意图

图4 接收信号分帧示意图
2.3 BPSK波形参数及拷贝副本数的确定
BPSK波信号可表示为[11]

将

记为编码信号, 则BPSK波信号为

BPSK波的波形和频谱示意图如图5所示。

图5 二进制相移键控(BPSK)波码型、波形和频谱示意图
为了同时实现距离和多普勒的高分辨, 要求主动声呐发射波形的模糊度函数具有时间和频率高分辨特性, 文中使用码元数为255的序列BPSK信号, 其模糊度函数轮廓图如图6所示。
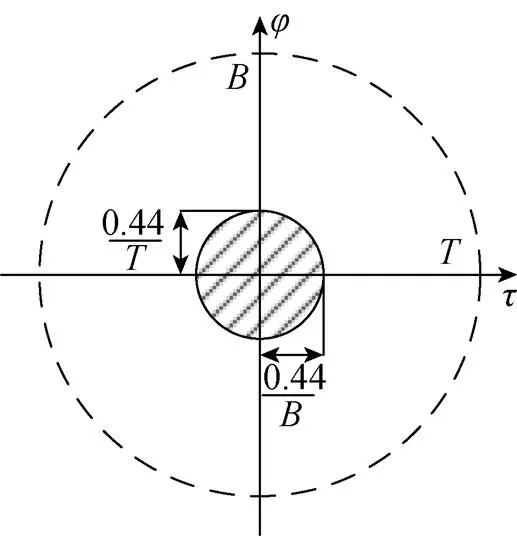
图6 BPSK波模糊度函数轮廓图(阴影部分为−3 dB剖面)
时间分辨率和频率分辨率分别为


波形的窄带速度容限为



表1 40个匹配副本参数
3 目标检测的DSP实现
多片DSP芯片对BPSK信号回波实时处理的任务分配如图7所示, 6片DSP芯片采取主(DSP0)、从(DSP1~DSP5)模式进行任务分配。
主DSP功能: 控制发射机发射BPSK信号; 通过LVDS获取A/D板采集的数据; 将获取的每通道数据进行FFT, 然后进行波束形成; 通过RapidIO总线将波束形成的结果发送给5片从DSP。
从DSP功能: 生成BPSK波副本; 进行匹配滤波(包括频域相关运算、IFFT运算和求模运算); 对求模后的结果进行归一化处理; 初步检测并将结果上传至主DSP。

图7 6片数字信号处理器(DSP)芯片任务分配示意图
数据流如图8所示, A/D板采集的通道数据由LVDS总线传输到主DSP当中, 主DSP加权进行波束形成后, 将波束形成结果通过RapidIO发送至从DSP, 从DSP进行匹配滤波并进行初步检测后将结果上传至主DSP汇总。

图8 数据处理过程DSP中的数据流图

在数据流处理过程中, 每一帧更新点数据, 因而每帧的处理总时间应小于点采样对应的时间, 这样可以保证处理过程的实时性。在每一帧的处理过程当中, DSP0完成30个通道数据的FFT, 11个方向的波束形成加权; DSP1~DSP5各自完成11个波束方向、每方向8个副本的88次匹配滤波。波束形成和匹配滤波的过程串行进行, DSP0每完成一个波束方向的波束形成后将结果发送至DSP1~DSP5进行匹配滤波。

图9 一次收发过程的工作节拍图

4 试验验证
4.1 系统实时性测试
分别测试图9中发射波形和接收数据过程的实时性。测试了主、从DSP处理过程实时性, 完成每次任务的耗时抖动都在±1 ms以内。
为了预留一定的实时性冗余, 处理过程占用整个允许时间的80%以内时, 即认为可以达到实时性要求。系统发射的BPSK波脉宽为200 ms, 采样率为40 kHz; 接收数据过程中, 处理窗宽度设置为16 384点(即帧长2对应16 384点), 数据处理采用1/2的重叠窗, 每帧刷新8192点, 对应204.8 ms。根据此条件, 发射波形过程和接收数据处理过程分别需要在160 ms和163 ms内完成。对系统进行了实时性测量, 结果如表2所示, 结果表明发射过程和接收过程满足实时性要求。

表2 系统实时性测量结果
①取24 000 ~26 000 Hz频带内的820个频点计算加权系数
②按照表1中的参数生成时域副本, 进行FFT保存频域数据
4.2 湖试实航测试
在千岛湖开展了低速运动小目标探测试验验证。文中设计的系统搭载在水下航行器上, 30阵元声呐基阵安装在航行器的艏部, 低速运动小目标使用应答器进行模拟。应答器对接收到的主动声呐信号进行幅度调节和频率搬移, 然后转发。试验中, 搭载系统的水下航行器以航速5 m/s进行直航。一共进行了30ping的发射, 文中给出了其中1ping数据的处理结果。该ping数据中, 应答器实际位于航行器水平方位3.1°, 距离1 360 m处。应答器模拟速度1 kn、目标强度3 dB的低速运动小目标。


图10 湖试数据处理结果

图11 检出目标帧(第10帧)模糊图
在第21、22和23帧当中, 归一化结果相对较大, 但没有超过检测门限, 这是由航道上灯塔反射的回波导致; 灯塔是静止的, 因此该回波对应的相对速度应为0, 而第21~23帧中, 灯塔的相对速度在±0.132 m/s之间, 这个偏差主要是由于航行器的航速受到水流速度的影响所导致。
5 结束语
文中给出的主动声呐信号处理系统基于6片C6455的DSP硬件平台, 设计了合理的任务分配、波束形成、匹配滤波处理方案。具体实现过程中采用优化后的FFT库、使用SIMD进行并行运算、采用近似求模算法节约了计算时间, 保证了整个处理过程的实时性需求, 实现了BPSK波主动声呐系统对低速运动小目标探测的实时处理。实航试验结果表明, 该系统具备搭载于水下移动平台用于探测低速小目标的能力, 具有广泛的应用前景。
下一步将重点研究采用单片多核DSP或其他集成度更高的芯片实现该系统的功能, 从而简化系统的结构, 进一步减少体积、质量及功耗。
[1] Yang T C. Acoustic Dopplergram for Intruder Defense[J]. The Journal of the Acoustical Society of America, 2008, 124(4): 2501-2501.
[2] Yang T C, Schindall J, Huang C F, et al. Clutter Reduction Using Doppler Sonar in a Harbor Environment[J]. The Journal of the Acoustical Society of America, 2012, 132(5): 3053-3067.
[3] 刘伯胜, 雷家煜. 水声学原理[M]. 第2版. 哈尔滨: 哈尔滨工程大学出版社, 2010.
[4] Kessel R, Hollett R. Underwater Intruder Detection Sonar for Harbor Protection[C]//The Second IEEE International Conference on Technologies for Homeland Security and Safety. Istanbul, Turkey: IEEE, 2006.
[5] Zhang C, Ma X, Wu Y, et al. Clutter-suppressing Performance Estimation Methods of Active Sonar Waveform Based on Reverberation Statistical Models in Littoral Environment[J]. IET Radar, Sonar & Navigation, 2017, 11(11): 1700-1708.
[6] Colin M E G D, Beerens S P. False-Alarm Reduction for Low-Frequency Active Sonar With BPSK Pulses: Experimental Results[J]. IEEE Journal of Oceanic Engineering, 2011, 36(1): 52-59.
[7] Doisy Y, Deruaz L, Ijsselmuide S P V, et al. Reverberation Suppression Using Wideband Doppler-Sensitive Pulses[J]. IEEE Journal of Oceanic Engineering, 2008, 33(4): 419- 433.
[8] 张驰, 马晓川, 吴永清, 等. 采用混响杂波比估计的有源声呐波形杂波抑制性能评价方法[J]. 声学学报, 2018, 43(4): 565-574.Zhang Chi, Ma Xiao-chuan, Wu Yong-qing, et al. A Method of Estimating the Clutter Suppressing Performance of Active Sonar Waveform Based on the Reverberation Mixture Distribution Model[J]. Acta Acustica, 2018, 43(4): 565-574.
[9] 鄢社锋, 马远良. 传感器阵列波束优化设计及应用 [M]. 北京: 科学出版社, 2009.
[10] 田坦. 声呐技术[M]. 第2版. 哈尔滨: 哈尔滨工程大学出版社, 2010.
[11] 朱埜. 主动声呐检测信息原理[M]. 北京: 科学出版社, 2014.
[12] 王波. 关于复数模值近似计算的探讨[J]. 西北电讯工程学院学报, 1983(2): 59-68.Wang Bo. A Discussion on Approximate Calculation of complex Amplitude[J]. Journal of Northwest Telecommunication Engineering Institute, 1983(2): 59-68.

Multi-chip DSP System for Active Sonar Detecting Low-speed Small Targets
ZHANG Shu-hao1,2, MA Xiao-chuan1,2, YANG Li1, ZHAN Fei1,2
(1. Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China; 2. School of Electronic, Electrical and Communication Engineering, University of Chinese Academy of Sciences, Beijing 100049, China)
The active sonar equipped on underwater moving platform such as autonomous undersea vehicle(AUV) is easily affected by clutter when it works in shallow water, which makes it hard to detect low-speed small targets. In this paper, the detecting system uses binary phase-shift keying(BPSK) waveform to reduce the clutter. To conquer the high computing burden of BPSK waveform, a signal processor composed of 6 high performance digital signal processor(DSP) chips is used in this paper, and a processing algorithm suitable for the hardware platform is designed, and the software is optimized in real time. Real-time test result shows that the system can complete the processing of one frame of echo data within 160 ms when the pulse width is 200 ms. Lake test verifies that the system can detect the transponder which is pre-arranged at 1 360 m, with a speed of 1 kn and a target strength of 3 dB. Test results show that the detecting system can effectively detect low-speed small targets in complex underwater environment in real time.
autonomous undersea vehicle(AUV); active sonar; digital signal processor(DSP) chip; waveform design; target detection; clutter suppression
TJ630.34; TB566
A
2096-3920(2019)06-0636-08
10.11993/j.issn.2096-3920.2019.06.006
张舒皓, 马晓川, 杨力, 等. 基于多片高性能DSP的主动声呐低速运动小目标探测系统[J]. 水下无人系统学报, 2019, 27(6): 636-643.
2018-12-20;
2019-04-19.
张舒皓(1991-), 男, 在读博士, 主要从事声呐信号处理和阵列信号处理研究.
(责任编辑: 陈 曦)
