基于滑模观测器的PMSM单相霍尔位置传感器故障容错控制算法
2020-01-08张明明刘维亭魏海峰李垣江
张明明, 刘维亭, 魏海峰, 张 懿, 李垣江, 李 震
基于滑模观测器的PMSM单相霍尔位置传感器故障容错控制算法
张明明, 刘维亭, 魏海峰, 张 懿, 李垣江, 李 震
(1. 江苏科技大学 电子信息学院, 江苏 镇江, 212003; 2. 江苏舾普泰克自动化科技有限公司, 江苏 镇江, 212003)
在高性能的水下航行器推进系统中, 为了解决由于永磁同步电机(PMSM)单相霍尔位置传感器故障, 导致的转子位置估算不准确、电机无法正常驱动等问题, 提出一种新型容错算法。首先将故障加速度引入传统平均速度法, 构建改进1阶加速度容错算法, 在改进1阶加速度容错算法估算转子位置的基础上,建立电流滑模观测器, 通过锁相环提取容错后的转子位置; 然后针对单相霍尔位置传感器故障状态, 将改进1阶加速度容错算法与滑模观测器的观测结果根据权值协调输出; 最后, 通过试验验证了单相霍尔位置传感器故障类型下的控制系统性能。试验结果表明, 新型容错算法提高了传统霍尔位置传感器PMSM控制系统的稳定性和可靠性, 有效改善了推进系统在故障情况下的加速性能, 优化了容错控制效果。
水下航行器; 永磁同步电机; 霍尔位置传感器; 滑模观测器; 容错控制
0 引言
推进电机是水下航行器的重要组成部分, 然而水下航行器空间有限、运行情况复杂, 选用空间占用小、响应速度快、节能高效的推进电机对水下航行器的发展具有重要意义[1]。永磁同步电机(permanent magnet synchronous motor, PMSM)体积小、质量轻、功率密度大、可靠性高等特点满足了水下航行器推进电机的需求[2-3]。在水下PMSM控制系统中, 需要获取转子速度和位置信息完成推进电机矢量控制。因霍尔位置传感器空间占用小、响应速度快、节能高效, 在PMSM驱动系统得到了广泛的研究和应用[4-5]。但是恶劣的海水环境、剧烈的振动等情况会造成霍尔位置传感器发生故障, 无法完成转子位置信息反馈。考虑水下航行器控制系统可靠性与推进电机维护等问题, PMSM霍尔位置传感器容错控制成为了近年来的研究热点[6-8]。
在PMSM霍尔位置传感器故障中, 单相霍尔故障发生的可能性最大, 影响最为广泛, 是霍尔位置传感器使用过程中迫切需要解决的问题。为了解决单相霍尔元件发生故障时, 电机控制系统无法正常完成转子位置信息反馈等问题。近年来国内外学者对霍尔位置传感器PMSM故障诊断和容错控制进行了大量研究[9-12]。Scelba等[13]通过线电压的频谱分析进行故障诊断, 故障情况下采用位置开环控制, 其中的离散傅里叶变换计算复杂, 故障诊断效率低, 容错控制的效果较差。聂铜等[14]对霍尔信号的状态变化顺序进行研究, 提出了基于霍尔状态序列的故障检测和容错控制方法, 但是故障诊断的效率仍然较低, 容错控制中有较大的性能波动。Dong等[15]提出了基于电机转向估计的故障诊断方法和霍尔信号重建方法, 提高了故障诊断的速度, 减小了故障发生瞬间的性能波动。Nguyen等[16]提出了角度临时估计方法, 能够在故障诊断过程中为驱动系统提供合理的位置估计, 抑制了故障引起的性能波动。
综上所述, 以上容错控制研究大都集中在故障诊断效率的提高和容错控制的稳态性能分析上, 并没有对单相霍尔位置传感器容错控制在驱动系统动态过程中的性能进行深入研究。基于此, 文中提出了一种在单相霍尔位置传感器故障下水下航行器推进电机容错控制的新型算法。在改进1阶加速度算法估算转子位置的基础上, 建立电流滑模观测器, 通过锁相环提取转子位置。根据单相霍尔位置传感器故障下电机运行状态, 将改进1阶加速度算法与滑模观测结果的权值协调输出, 从而提高水下航行器中PMSM控制系统稳定性和可靠性。
1 霍尔位置传感器位置信号获取


图1 永磁同步电机控制系统
霍尔位置传感器的输出信号通过平均速度算法进行转子位置估算, 可以满足PMSM的正弦波驱动要求。但是霍尔位置传感器容易受到其工作环境, 如温度、灰尘、电磁干扰等的影响, 使得输出信号出现异常, 甚至造成传感器损坏, 三相霍尔位置传感器各种故障类型中, 单相霍尔位置传感器发生可能性最大。考虑控制系统可靠性和电机维护等问题, 针对单相霍尔位置传感器故障情况, 提出一种新型容错算法, 以解决由霍尔故障导致电机无法正常运行等问题。

图2 霍尔元件输出波形图
2 单相霍尔位置传感器故障分析


图3 单相霍尔位置传感器故障输出波形图


表1 电机传感器故障诊断表
3 单相霍尔位置传感器容错控制算法
3.1 传统平均速度容错算法

当霍尔位置信号出现异常时, 使用前一正常运行区间代替故障大区间包括的2个故障区间运行时间, 实现单相霍尔位置传感器故障下系统容错控制。
传统平均速度容错算法可以在霍尔位置传感器出现故障时, 保证系统可继续稳定运行, 增加了系统可靠性。但是当电机加减速时, 系统动态性能下降, 且存在严重滞后问题。
3.2 改进型1阶加速度容错算法



图4 单个霍尔扇区展开图


在单相霍尔位置传感器故障中, 将加速度引入换相时间估算值中, 改善霍尔位置传感器故障下加减速阶段控制性能。霍尔位置传感器故障容错算法如表2所示。

表2 霍尔位置传感器故障容错表
引入故障加速度使得转速和角度估算更加准确, 但由于改进的1阶加速度容错算法主要依赖霍尔位置信号, 无法消除霍尔位置传感器安装误差带来的影响, 且算法中采用的角速度和加速度值依然为上一扇区时刻平均值, 加减速时对转子位置和转速估算依然存在一定的滞后, 难以实现较好的转速闭环控制。
3.3 基于滑模观测器的容错控制算法
针对以上问题, 综合考虑PMSM矢量控制系统成本及可靠性, 提出各种故障下的霍尔位置传感器故障检测和容错控制, 其流程见图5。

图5 新型容错控制结构框图
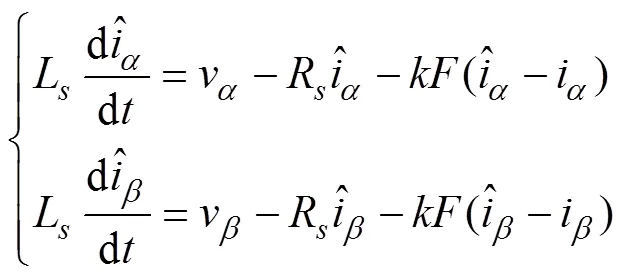
在新型容错算法中, 根据电机数学模型在两相静止坐标系下, 构建基于电流状态方程的滑模观测方程

考虑到滑模观测器观测的反电动势信号中存在一定的抖振信号, 会影响转子位置估算精度。因此, 通过锁相环对反电动势进行转速与转子位置的提取。锁相环控制框图如图6所示。

图6 锁相环控制框图
根据图6可得锁相环系统闭环传递函数


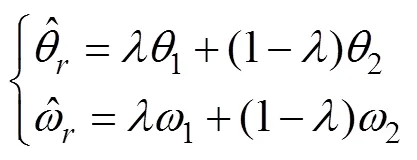
结合改进1阶加速度容错算法和滑模观测器观测电流算法, 并考虑霍尔位置传感器故障, 建立转子位置估算公式

该算法可以在电机运行时解决单相霍尔位置传感器故障下无法正确估算转子位置信息、完成电机驱动等问题, 改善了单相霍尔位置传感器故障下系统容错控制性能, 增加了系统可靠性。
4 实验分析
在兼有编码器和霍尔位置传感器的PMSM交流调速平台上, 对文中提出的新型霍尔位置传感器容错算法进行了实验验证。系统实验平台搭建如图7所示。

图7 系统实验平台
针对单相霍尔位置传感器故障下电机启动阶段和转速大小突变典型工况进行实验研究, 实测对比阶段选择上位机。通过对比基于平均速度法和改进1阶加速度算法下的单相霍尔位置传感器故障容错控制与基于新型算法下的角度估计结果、电机运行三相电流和转速波形, 以验证新型霍尔位置传感器容错控制策略的有效性。对应的实验电机参数如表3所示。
首先通过实验验证3种容错控制算法在不同故障情况下的角度估计结果, 如图8所示, 其中电机稳态机械角速度为400 r/min, 在=0.14 s处将目标转速提高到800 r/min。由图8可知, 基于传统平均速度法估算的转子位置与实际转子位置存在较大偏差, 且滞后性较为明显。基于改进1阶加速度算法的容错控制, 单霍尔故障容错控制下的角度估计结果与传统平均速度算法估算结果相比得到一定改善, 但依然存在明显滞后现象。新型容错控制算法下角度估算偏差相对较小, 滞后不明显, 明显改善了容错控制性能, 增大系统运行稳定性、可靠性。
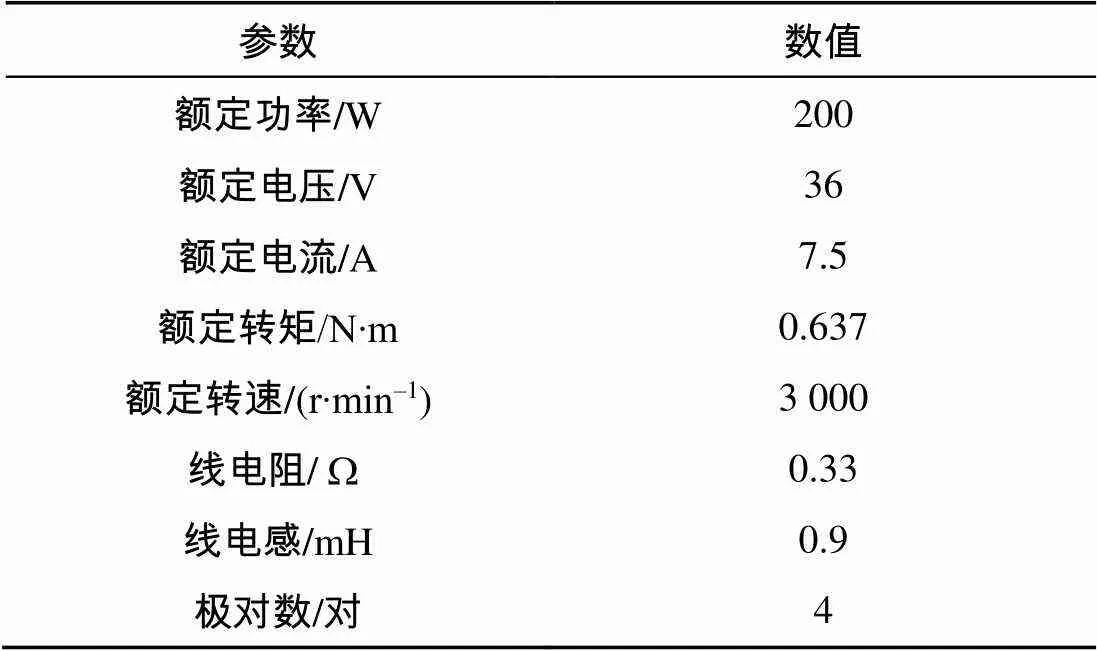
表3 实验电机参数

图8 转子实际位置与估算位置波形图
图9针对2种容错算法的动态性能进行实验验证, 在=0.10 s时电机启动,=0.16 s处电机加速。由图9所知, 改进1阶加速度容错算法下的电机起动过程中电流出现了较为明显的波形畸变。新型容错控制算法较改进1阶加速度容错算法电流波形畸变较小, 电流波形更贴近于霍尔位置传感器正常情况下电流波形, 有效改善了驱动系统在故障情况下的运行性能, 优化了容错控制效果。

图9 三相电流波形图
图10针对2种容错控制算法的转速估算性能进行实验验证。改进1阶加速度容错算法下的电机转速与真实值存在一定偏差。新型容错控制算法较改进1阶加速度容错算法, 转速估计值误差较小, 控制效果最优。

图10 电机启动转速波形图
5 结束语
针对PMSM中单相霍尔位置传感器故障导致转子位置估算不准确的问题, 提出了一种新型容错控制算法。将滑模观测器与引入故障加速度的改进1阶加速度容错算法相结合, 在容错控制中定义权值概念, 将改进容错算法与滑模观测器观测结果的根据权值协调输出。
以一台兼有2500线编码器和霍尔位置传感器的PMSM为实验对象, 对单相霍尔位置传感器故障下电机起动阶段和转速大小突变典型工况进行实验研究, 将编码器获得的转子位置、电流和转速波形与含故障霍尔位置传感器获得的转子位置与转速相比较, 验证霍尔位置传感器容错控制策略的有效性。结果表明, 文中提出的新型容错控制算法有效改善了驱动系统在故障情况下的加速性能, 优化了容错控制效果, 增加了水下航行器推进系统可靠性。下一步将重点研究容错算法策略的工程化问题, 以期实现其工程应用。
[1] 刘彦呈, 刘伟民, 郭昊昊. 基于田口法的永磁同步推进电机优化设计[J]. 微特电机, 2018, 46(3): 18-20.Liu Yan-cheng, Liu Wei-min, Guo Hao-hao. Optimization Design of Permanent Magnet Synchronous Propulsion Motor Based on Taguchi Method[J]. Micro Motor, 2018, 46(3): 18-20.
[2] 徐海珠, 谢顺依, 崔维开. 基于脉振高频电压注入的对转永磁同步电机无位置传感器控制[J]. 鱼雷技术, 2012, 20(4): 290-294.Xu Hai-zhu, Xie shun-yi, Cui wei-kai, et al. Position-senserless Control of a Rotating Permanent Magnet Synchronous Motor Based on Pulsating High-frequency Voltage Injection[J]. Torpedo Technology, 2012, 20(4): 290-294.
[3] 郭志荣, 高峰, 王其林. 基于RBF网络和MRAS的鱼雷永磁同步电机无速度传感器控制方法[J]. 水下无人系统学报, 2017, 25(5): 448-452.Guo zhi-rong, Gao feng, Wang qi-lin. Control Method of Torpedo Permanent Magnet Synchronous Motor without Speed Sensor Based on RBF Network and MRAS[J]. Torpedo Technology, 2017, 25(5): 448-452.
[4] Samoylenko N, Han Q, Jatskevich J. Dynamic Performance of Brushless DC Motors With Unbalanced Hall Sensors[J]. IEEE Transactions on Energy Conversion, 2008, 23(3): 752-763.
[5] Lin F J, Sun I F, Yang K J, et al. Recurrent Fuzzy Neural Cerebellar Model Articulation Network Fault-Tolerant Control of Six-Phase Permanent Magnet Synchronous Motor Position Servo Drive[J]. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 153-167.
[6] 朱孟美, 张云, 解兆延, 等. 基于霍尔位置传感器的电动汽车用永磁同步电机的控制[J]. 电机与控制应用, 2016, 43(11): 23-27.Zhu Meng-mei, Zhang Yun, Xie Zhao-yan, et al. Control of Permanent Magnet Synchronous Motor for Electric Vehicle Based on Hall Position Sensor[J]. Electric Machines & Control Applications, 2016, 43(11): 23-27.
[7] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.Liu Ji-long, Xiao Fei, Shen Yang, et al. Review of non-position Sensor Control Technology for Permanent Magnet Synchronous Motor[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
[8] 赵品志, 杨贵杰, 李勇. 五相永磁同步电动机单相开相故障的容错控制策略[J]. 中国电机工程学报, 2011, 31(24): 68-76.
Zhao Pin-zhi, Yang Gui-jie, Li Yong. Fault Tolerant Control Strategy for Single-Phase Open Circuit Fault of Five-Phase Permanent Magnet Synchronous Motor[J]. Proceedings of the CSEE, 2011, 31(24): 68-76.
[9] 董亮辉, 刘景林. 永磁同步电机位置传感器的故障检测和容错控制[J]. 西北工业大学学报, 2016, 34(2): 306-312.Dong Liang-hui, Liu Jing-lin. Fault Detection and Fault-tolerant Control of Permanent Magnet Synchronous Motor Position Sensor [J]. Journal of Northwest Polytechnical University, 2016, 34(2): 306-312.
[10] 张志锋, 刘晓东. 基于高频信号注入的永磁同步电动机的无传感器控制及位置估计误差补偿[J]. 电气技术, 2017, 18(5): 12-18.Zhang Zhi-feng, Liu Xiao-dong. Sensorless Control and Position Estimation Error Compensation of Permanent Magnet Synchronous Motor Based on High Frequency Signal Injection[J]. Electric Technique, 2017, 18(5): 12-18.
[11] Kim S Y, Choi C, Lee K, et al. An Improved Rotor Position Estimation With Vector-Tracking Observer in PMSM Drives With Low-Resolution Hall-Effect Sensors[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4078-4086.
[12] Balaban E, Saxena A, Bansal P, et al. Modeling, Detection, and Disambiguation of Sensor Faults for Aerospace Applications[J]. IEEE Sensors Journal, 2009, 9(12): 1907-1917.
[13] Scelba G, De Donato G, Scarcella G, et al. Fault-Tolerant Rotor Position and Velocity Estimation Using Binary Hall-Effect Sensors for Low-Cost Vector Control Drives[J]. Industry Applications IEEE Transactions on, 2014, 50(5): 3403-3413.
[14] 聂铜, 张幽彤. 永磁同步电机霍尔位置传感器自标定算法研究[J]. 电机与控制应用, 2018, 45(4): 73-79.Nie Tong, Zhang You-tong. Research on Self-calibration Algorithm of Permanent Magnet Synchronous Motor Hall Position Sensor[J]. Lectric Machines & Control Applications, 2018, 45(4): 73-79.
[15] Dong L, Jatskevich J, Huang Y, et al. Fault Diagnosis and Signal Reconstruction of Hall Sensors in Brushless Permanent Magnet Motor Drives[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 118-131.
[16] Nguyen N K, Meinguet F, Semail E, et al. Fault-Tolerant Operation of an Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter Fault[J]. IEEE Transactions on Industrial Electronics, 2015, 63(1): 595-605.
Fault-Tolerant Control Algorithm of Single-Phase Hall Position Sensor Based on Sliding Mode Observer for PMSM
ZHANG Ming-ming, LIU Wei-ting, WEI Hai-feng, ZHANG Yi, LI Yuan-jiang, LI Zhen
(1. School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212000, China; 2. Jiangsu Shiptek Automation Technology Co., Ltd, Zhenjiang 212003, China)
A new fault-tolerant control algorithm for the permanent magnet synchronous motor (PMSM) in high performance underwater vehicle propulsion system is proposed in order to solve the problems of inaccurate rotor position estimation and abnormal motor driving caused by Hall position sensor fault. Based on the traditional mean velocity method, fault acceleration is introduced to construct an improved first-order acceleration fault-tolerant control algorithm. This improved first-order acceleration fault-tolerant algorithm is adopted to estimate the rotor position, and then a current sliding mode observer is established to extract the fault-tolerant rotor position through a phase-locked loop. For the fault state of single Hall sensor, the result of the improved first-order acceleration fault-tolerant algorithm is coordinated with the observation result of the sliding mode observer to output according to their weights. Finally, the performance of the control system for the fault type of single-phase Hall position sensor is verified by experiments. Experimental results show that the new fault-tolerant algorithm improves the stability and reliability of the traditional PMSM control system with Hall position sensor. The acceleration performance of the propulsion system in the case of fault is effectively improved, and the fault-tolerant control effect is optimized.
underwater vehicle; permanent magnet synchronous motor (PMSM); Hall position sensor; sliding mode observer; fault-tolerant control
TJ630.32; TM307
A
2096-3920(2019)06-0651-07
10.11993/j.issn.2096-3920.2019.06.008
张明明, 刘维亭, 魏海峰, 等. 基于滑模观测器的PMSM单相霍尔位置传感器故障容错控制算法[J]. 水下无人系统学报, 2019, 27(6): 651-657.
2019-04-15;
2019-05-19.
国家自然科学基金项目(51809128); 江苏省省重点研发计划产业前瞻与共性关键技术重点项目(BE2018007); 江苏省研究生科研与实践创新计划项目资助.
张明明(1994-), 男, 在读硕士, 研究方向为电机控制.
(责任编辑: 许 妍)