一种分离式可自主移动的多功能护理床设计
2019-12-31刘浩宇丁皓施春迅聂智超刘雨佳
刘浩宇,丁皓,施春迅,聂智超,刘雨佳
1.上海理工大学 医疗器械与食品学院(上海,200093) 2.上海健康医学院 医疗器械学院(上海,201318)
0 引言
随着现在社会的不断发展进步和人们生活水平的提高,我国人均寿命逐步增长,人口老龄化的问题日趋显著[1-2]。根据联合国预测,到2050年,全球60岁以上的老年人口数量将到达20.92亿,而我国将占据五分之一左右[3]。长期卧床不起或患有慢性疾病人群对护理床的要求愈发强烈,目前电动护理床在智能护理床领域的使用非常普遍。如日本八乐梦公司研发的Stylish Hospital Bed电动护理床[4],能实现升降靠背和膝盖、显示和限制床体角度、护士控制面板等功能;山东建筑大学的谭林等[5]设计了一种新型机器人化护理床,具有支背、屈腿、翻身、语音控制等功能,建立了病人与护理床友好的交互方式。但市场上护理床大多数都只能满足单一方面的需求,外观造型和功能大多相同,无法实现护理床在急救和手术时的灵活移动性,本文设计了一种分离式可自主移动的多功能护理床,医护或家庭成员可通过手机APP远程控制智能护理床完成相应的机械功能动作;实时监测患者的身体重心部位,防止病患在无人看护时坠落;并且在发生紧急情况时,可实现床体分离并自主移动[6],避免了病患在手术床与护理床之间的转移;实现了护理、监测和便捷的智能化。
1 护理床整体结构设计
在设计护理床的结构时,主要考虑了以下几个要求[7]:
1)满足各种身体姿势护理的要求;
2)每块床板的转动角度范围应参考医疗保健要求和身体的舒适度;
3)护理床的尺寸结构应符合人机工程学要求,达到一定的可靠性、稳定性和安全性;
4)护理床应具有一定的移动性。
本文设计的多功能护理床的三维建模如图1所示,可实现床体分离和移动。
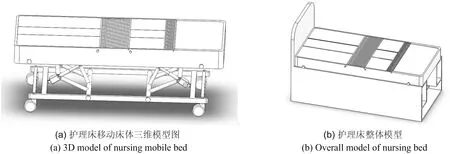
图1 护理床三维建模
在设计护理床时,考虑了其功能需求[8],设计了一款分离式可自主移动的多功能护理床,其具有起背、抬腿、屈腿、翻身、升降和自主移动等功能,在满足病患日常生活的基本要求下,实现了护理床的自主移动功能。
在设计与人体背部相接触的面板时,考虑到起背、抬腿、屈腿和翻身机构在翻转角度过大,造成身体活动,故在各机构面板连接处采用柔性铰链[9]。依据《中华人民共和国行业标准-病床》标准,并参考相关护理床设计,最终确定面板各模块设计尺寸如图2所示。
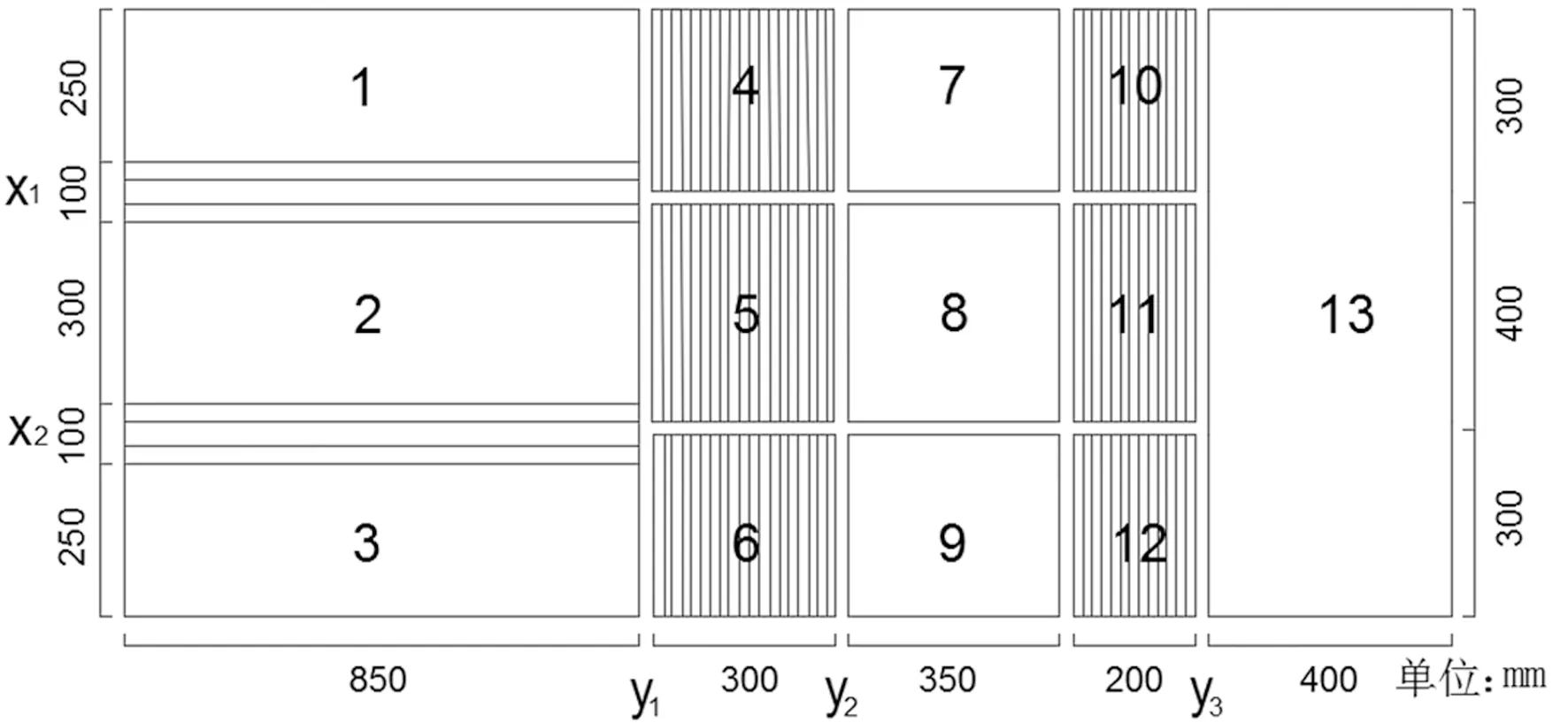
图2 多功能护理床床板各模块尺寸示意图
按照《医用电动床安全专用要求》给出的背板、大腿板、小腿板等的调节范围值,在考虑实际使用等因素下,本文设计的护理床各床面板翻转角度如图3所示。
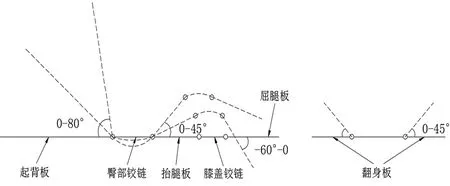
图3 多功能护理床各面板翻转角度示意图
其位姿功能及相应的床面板动作为:
1)起背模块:面板1、2、3相互配合,同时绕y1轴旋转,4、5、6为臀部铰链。
2)抬腿模块:面板7、8、9相互配合,同时绕y2轴旋转,带动铰链10、11、12以及板13运动。
3)翻身模块:面板1、7与铰链4、10绕x1轴旋转,面板3、9与铰链6、12绕x2轴旋转。
2 系统硬件设计
多功能护理床系统硬件部分由中央控制模块、供电电源模块、电机驱动电路设计模块、重心移动监测模块[10]、护理床自主移动模块等硬件组成。系统结构框图如图4所示。
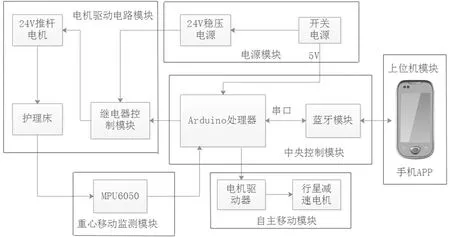
图4 护理床控制系统总体框图
系统的工作流程为:电源模块为整个系统提供工作电源;手机APP通过蓝牙模块发送指令给Arduino处理器,Arduino处理器将接收的指令处理后控制相应的IO口高低电平输入到继电器控制模块,进而控制相应的电动推杆运动,实现护理床的各项功能。Arduino控制板通过串口采集重心移动监测模块处理的结果通过蓝牙发送到手机APP,监测患者身体重心在护理床上的移动,到达危险范围后报警,从而防止坠落。手机APP通过蓝牙模块将指令发送到Arduino控制板,Arduino控制板将收到的指令转化为PWM等信号传输给电机驱动器,行星减速电机执行相应的动作,实现护理床前进、后退、转向等自主移动功能。该流程可实现护理床的多种功能,下文将对各子模块进行说明介绍。
2.1 中央控制模块设计
中央控制模块是护理床的主要核心控制模块,用于接收和处理指令数据包括Arduino处理器设计和蓝牙模块设计等。
2.1.1Arduino处理器
ArduinoUNO是Arduino USB接口系列的最新版本,作为Arduino平台的参考标准模板。主控制器电路选用ATmega328P-PU作为护理床的控制系统的主控芯片[11],该芯片是一款低功耗8位CMOS单片机基于AVR控制器增强型RISC架构,同时具有14路数字输入/输出口(其中6路可作为PWM输出),6路模拟输入,一个16 MHz晶体振荡器,一个USB口,一个电源插座,一个ICSP header和一个复位按钮。处理器满足护理床的电路控制要求。
2.1.2 蓝牙模块
蓝牙模块实现了手机APP与下位机处理器的数据通信[12],本次设计蓝牙通信模块核心芯片采用HC-05蓝牙芯片,通过低压差电压调整器RT9193-33连接微处理器,支持蓝牙V2.0协议,兼容大部分微处理器系统,便捷实现手机、电脑等各种带蓝牙的设备实现数据通信。
2.2 电源模块设计
在系统设计中,电机驱动电路采用24 V供电,其余电路均采用5 V供电,电源模块的设计包括开关电源电路[13]和24 V稳压电路,电路采用开关电源集成芯片LM2596S-ADJ,相比较LM2596和XL4005降压模块,其输出功率可达75 W,输入电压3.0~35 V,输出电流可达3 A,输出电压范围为3~30 V,开关频率为150 kHz,可实现开关电源24 V到5 V的转换。
2.3 电机驱动电路设计
电机驱动电路是由ATmega328P-PU控制芯片通过双向隔离型继电器控制模块驱动24 V直流电动推杆,继电器接收控制器高低电平信号执行电路通断动作,进而控制各个直流电动推杆运动。
2.4 重心移动监测模块
重心移动监测模块是用于针对病患在床的状态,防止意外跌落。本设计采用MPU6050模块放置在病患的腰部,监测病患腰部的空间运动状态,设置一个安全范围,当不在安全范围内,系统将会报警,提醒医护人员可能会发生事故。MPU6050是一种空间运动传感器芯片[14],可获取当前三个加速度分量和三个旋转角速度,可直接使用Arduino控制器通过串口读取病患在护理床上的空间数据变化并发送到上位机手机APP。
2.5 自主移动模块
护理床移动床体是由两后轮差速驱动,前轮为万向轮。驱动电机为100 W行星减速电机,通过24 V双通道直流有刷电机驱动器与Arduino控制器相连,其引脚图如图6所示,图6右侧引脚为驱动器功率接口,M1与M2的A、B口分别对应行星减速电机的引脚线,P+与P-口对应两个电机的电源正负极输入,外接24 V电源。左侧1、6口为VCC,2、7口为PWM占空比调速,3、4、8、9为控制逻辑高低电平信号口,5、x口为隔离电源GND。
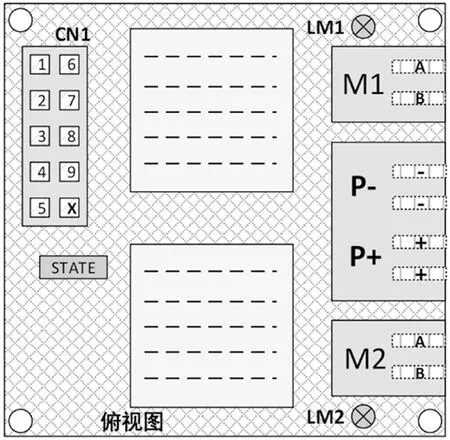
图6 行星减速电机驱动器引脚图
3 系统软件设计
3.1 上位机软件开发流程
上位机界面如图7所示,上位机软件基于安卓系统开发[15],用户打开软件APP,首先APP进行初始化,之后蓝牙连接,在蓝牙连接成功后,进入界面功能模块选择。

图7 上位机界面图
在重心移动显示界面,用户观看坐标是否变化来实时显示重心移动参数信息;在位姿调整模式和护理床移动模式中,用户可以通过触控相应的按钮来实现功能;APP通过蓝牙将相应的数据指令发送给下位机处理,完成各功能模块;上位机软件开发流程如图8所示。
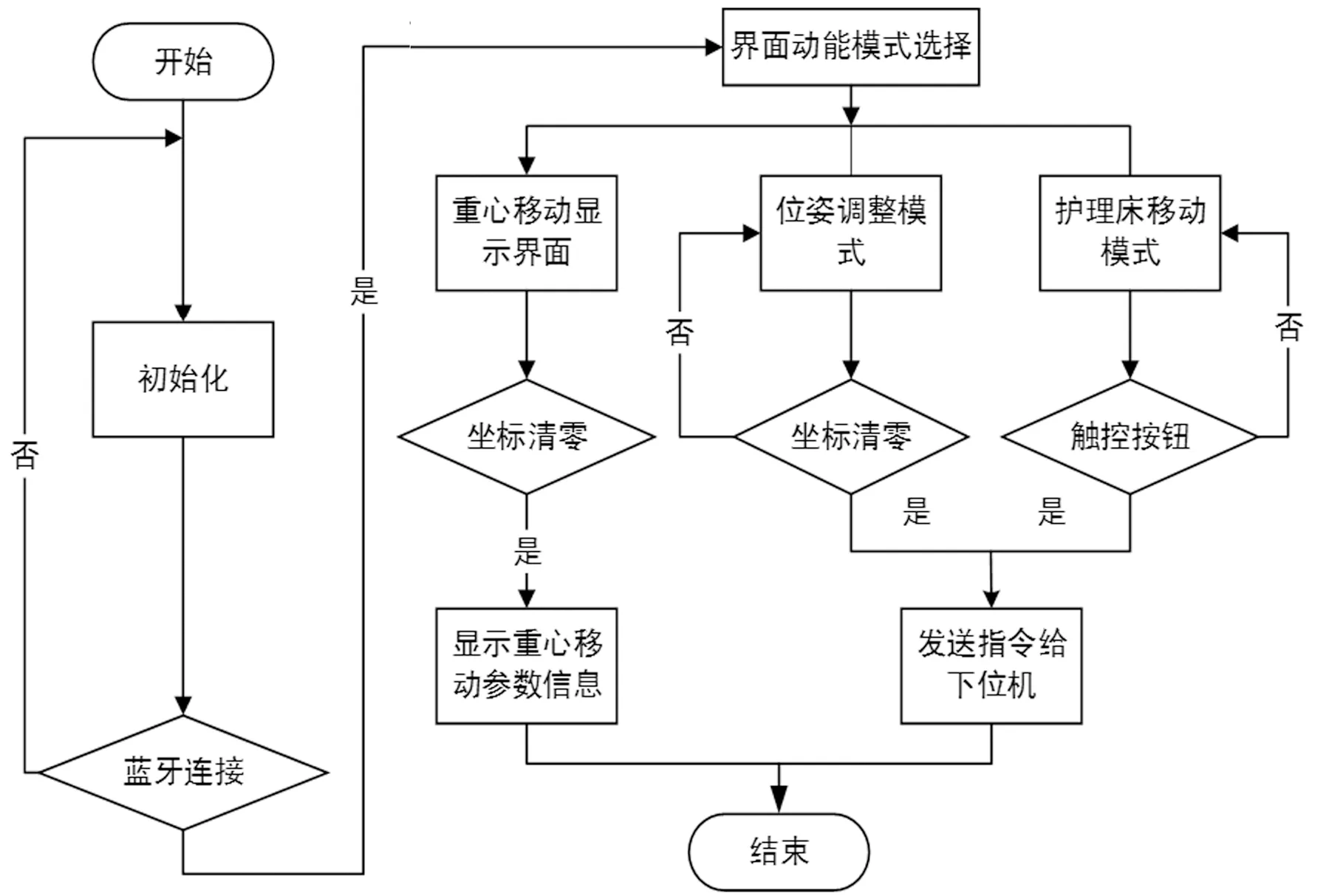
图8 上位机软件开发流程图
3.2 下位机软件开发流程
下位机软件开发流程如图9所示,下位机软件开发是基于ATmega328P-PU芯片的嵌入式开发,编程开发工具采用Arduino IDE,下位机系统上电后,首先初始化单片机的系统时钟、ADC、计数器和串口等,之后下位机接收上位机控制系统发送的数据指令,对数据指令进行解析判断并执行相应的控制模式。其中上位机界面按钮可实现位姿调整模式、护理床移动模式和重心移动查询模式。
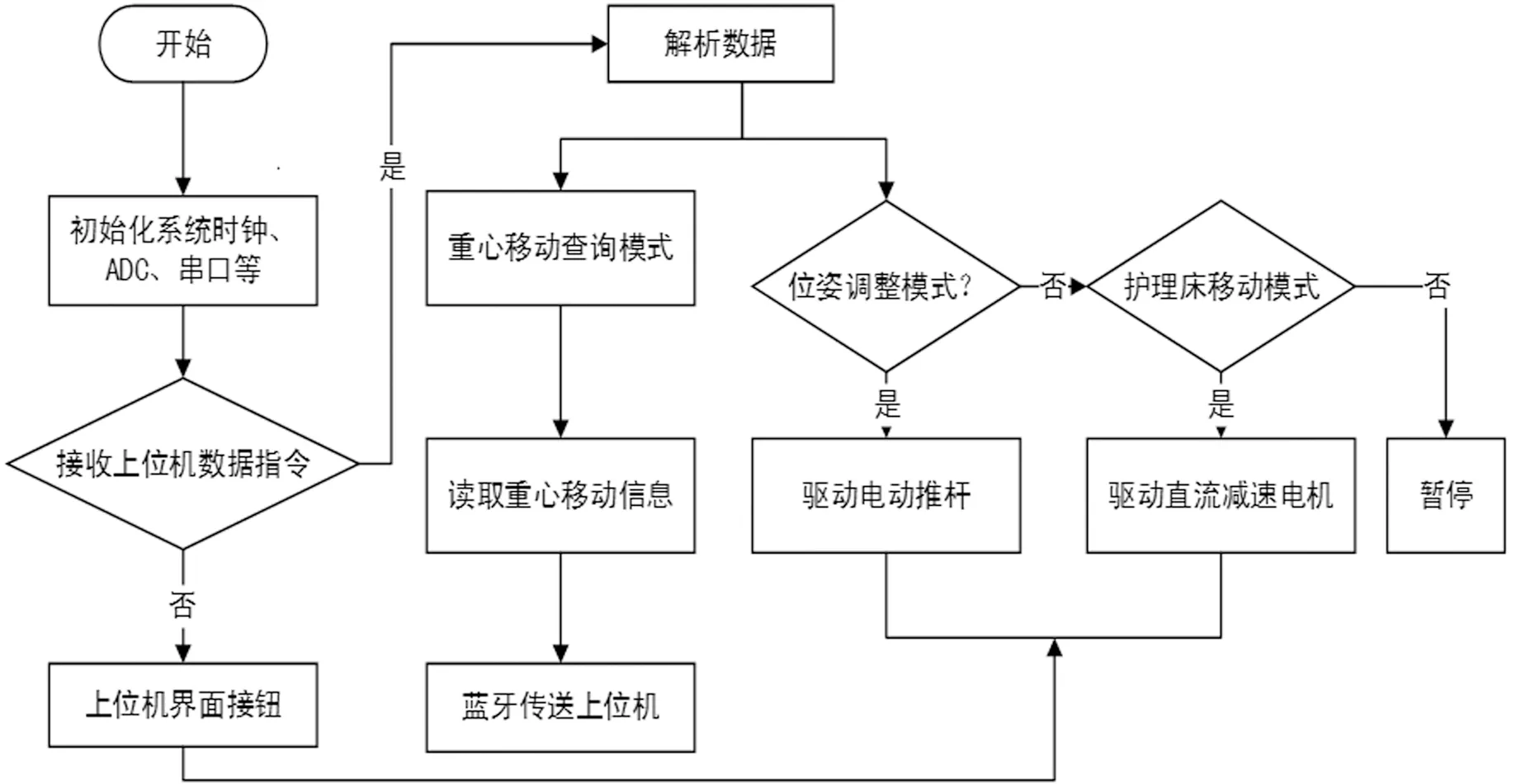
图9 下位机软件开发流程图
4 可靠性测试分析
本次设计加工的分离式可自主移动的多功能护理床的移动床体实物样机(比例1:2)如图11所示。
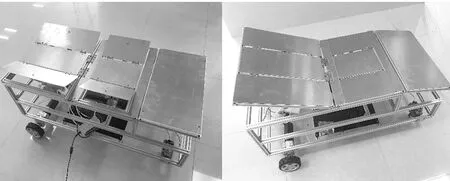
图10 多功能护理床实物样机图
该样机床板采用起背板、大腿板和小腿板共7块板组成,臀部板由柔性铰链代替(未安装),防止翻转时造成病患腰部受伤,护理床可载重100 kg。
4.1 床体位姿调整模式测试分析
床体位姿调整模式实现如下:手机APP通过蓝牙模块发送控制直流电动推杆指令给ATmega328P-PU处理器,处理器将读取的数据指令转换为驱动电机运动,为了验证各面板翻转角度的准确性,通过多次设定各面板翻转角度与实际测量的角度作对比,实验步骤为:先通过APP发送面板翻转角度;再用万能角度尺测出实际翻转角度。
其测试结果如表1所示。
测试结果显示:上位机终端可实时控制各个床板的运动,且都存在一定的角度误差,可能的原因是推杆电机的制动受惯性的影响。最后误差都在2.5°之内,符合设计要求。
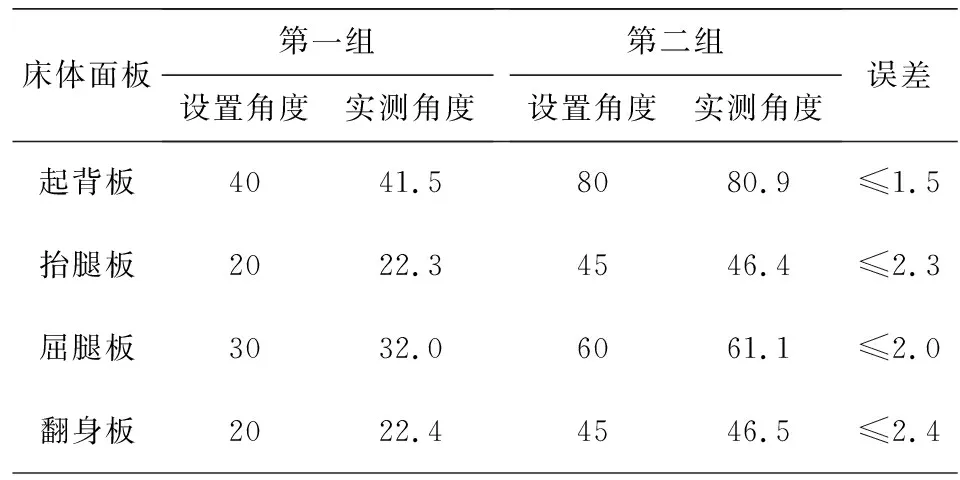
表1 床体位姿调整测试结果(°)
5 总结与展望
本文设计了一种分离式可自主移动的多功能护理床,完成了以下工作:
1)通过分析多功能护理床的各项功能,设计了对应的机构、绘制三维模型、对护理床底部床架进行力学分析、搭建了相应的控制系统、研制了实验样机以及软件APP。
2)对护理床各功能进行可靠性测试分析,验证了其功能模块是可实现的。
在接下来的工作将会完善和优化多功能护理床的相关功能,有医院环境的导航和自主避障、路径优化、床旁机械臂以及康复功能,打造下一代护理机器人。
