一种双层浮筏式南极望远镜运输减振方案设计*
2019-12-31温海焜宫雪非崔鹏惠杜福嘉李正阳
温海焜, 宫雪非, 崔鹏惠, 姚 旭, 杜福嘉, 李正阳
(1.中国科学院国家天文台南京天文光学技术研究所 南京,210042)
(2.中国科学院天文光学技术重点实验室 南京,210042) (3.国家自然资源部中国极地研究中心 上海,200136)
引 言
南极Dome A地区位于南极内陆距海岸线最遥远的一个冰穹,也是南极内陆冰盖海拔最高的地区,其特殊性是地球上其他观测点所不具备的,因而在天文学、冰川学等学科上具有极为重要的科考价值[1];但是从上海中国南极科考出发基地到Dome A地区的路途却十分艰难。
根据现有的科学资料表明[2],从上海出发基地到南极Dome A之间的道路非常崎岖,其振动的强度远远超过了普通公路的运输包装缓冲要求。随着南极昆仑站地区的不断建设和发展,未来将有越来越多的精密仪器运往该地区进行科学实验工作,因此需要设计一种特殊的适合于该地区运输使用的包装缓冲方法,以保证精密仪器的运输安全。
1 南极运输路谱分析

图1 安装在雪橇上的测振仪
从2007—2013年,三向测振仪被安装在雪橇或集装箱的底板或者钢梁上跟随南极科考队进行现场实时振动加速度数据测量,如图1所示。振动数据采集的对象为中国南极科考队的运输全程,包括雪龙号海上运输、直升飞机海冰装吊运输、中山站途径南极泰山站到Dome A的南极内陆运输等部分。
测振仪沿途记录西风带、直升飞机起吊降落货物、雪地车和雪橇翻山越岭等各种剧烈的振动情况,该数据基本能够反映从上海到昆仑站的南极道路的振动特点。
现有的科学资料表明,在南极泰山站到南极昆仑站之间的道路是该运输过程中振动强度最大的区域,表1为6年间该段地区的数据统计中振动强度最高的5组数据。
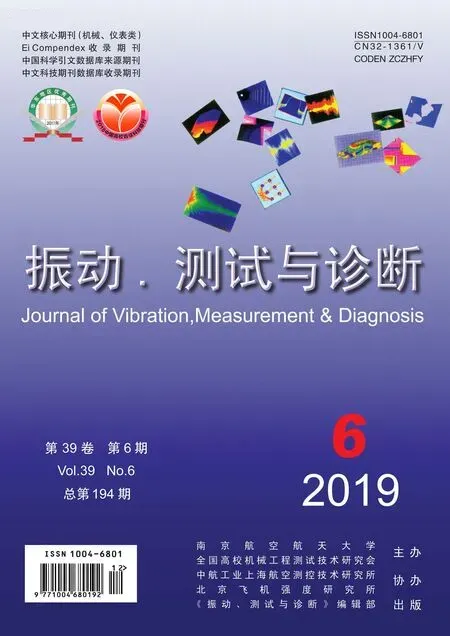
图2为表1中信号1的功率谱密度图[2],其横纵坐标均以对数形式表示。其中:黄色为垂直方向的振动;红色为左右方向的振动;绿色为前后方向的振动。由图2可以看出,振动加速度主要还是集中在垂直方向,垂直方向第1峰值频率出现在7 Hz,而且功率谱的峰值达到了1g2/Hz,其振动的均方根值达到了14.777g,峰值为200g。该振动加速度值远超国内普通公路运输的加速度值,因此需要特殊设计缓冲减振包装系统以确保精密仪器的运输安全。
表1 泰山站到昆仑站运输振动最剧烈的5组数据
Tab.1 The top 5 strongest vibration from Taishan station to Kunlun station

序号振动发生时间振动加速度均方根值/g垂直方向前后方向左右方向12009-01-0119:38:5314.7773.6844.22622009-01-0118:00:2014.5313.9333.72032009-01-0119:50:1314.4074.1424.03642008-12-2712:22:558.6772.6112.16952011-12-3017:27:076.8962.6231.665
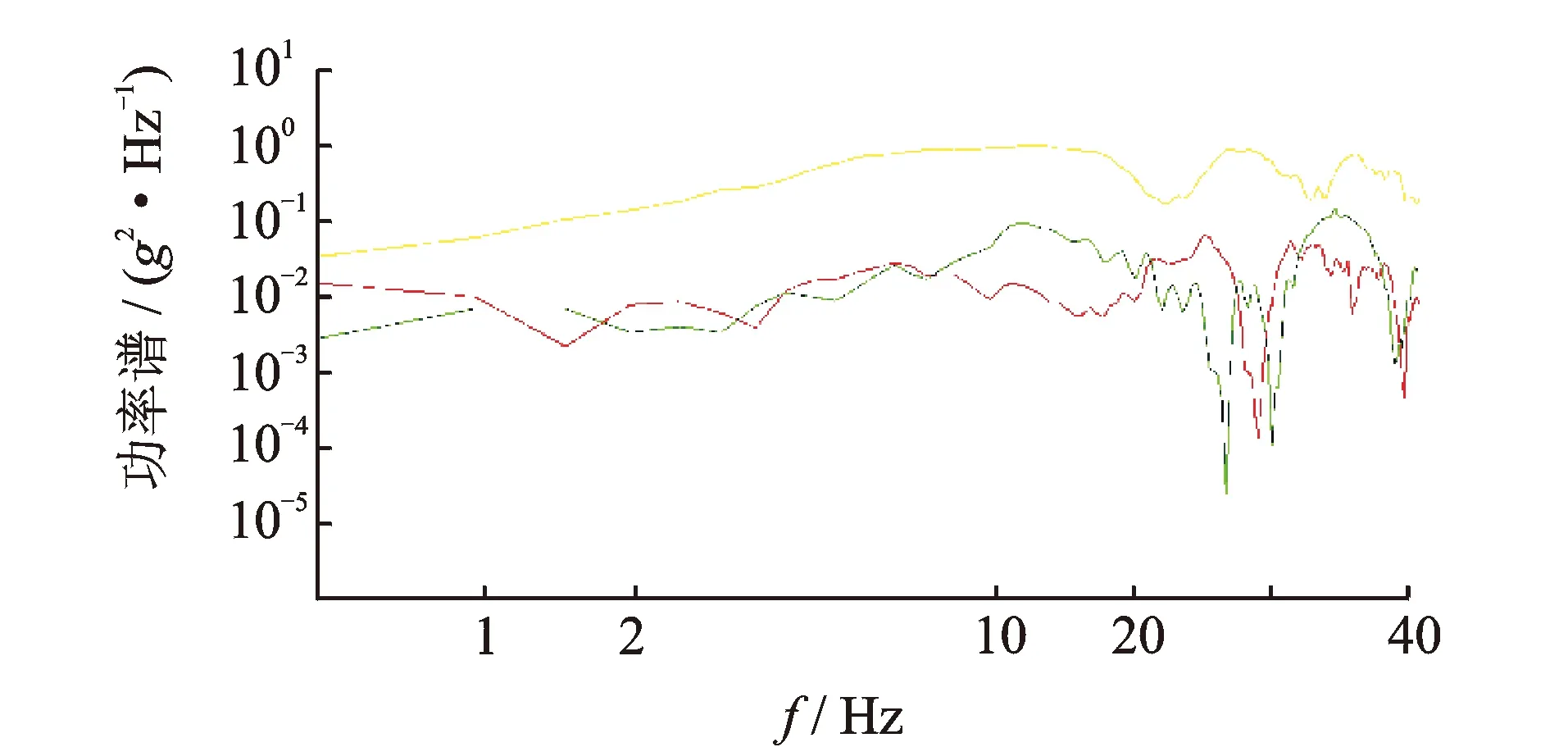
图2 表1中信号1的功率谱密度图
2 南极主镜包装箱双层浮筏式减振设计
南极巡天望远镜是一台全自动无人值守望远镜,数据可以通过卫星传送至国内,实现越冬远程观测任务。该望远镜的主镜直径为680 mm[3]。由于在南极地区现场装调时间紧张,要克服低温、低气压等不利的气候条件,在设计减振方案中需要将望远镜主镜及其支撑结构一起设计。在确保主镜安全的同时,需要主镜支撑结构也不被破坏,保证主镜的面型不发生变化,这样直接装在望远镜上就能使用,以节约现场的装调时间。因此,望远镜主镜及其支撑结构是整个望远镜装置运输包装的重点及难点,笔者根据该主镜及其支撑装置的结构设计了一种双层浮筏式减振系统。
2.1 双层减振系统的参数设计
双层隔振装置采用了2层隔振器,并在2层隔振器之间插入一个中间质量块。当双层隔振装置受到激励力时,一部分力被中间质量块吸收,使传递到包装元件的力变小,因此双层隔振系统具有良好的隔振效果[4]。
以往的科学实验结果表明,双层隔振系统在减振、降噪及稳定性等方面远远优于单层隔振系统。虽然双层隔振对振动的抑制效果比较好,但双层隔振比单层隔振系统多一个共振峰,如果双层隔振装置的参数选择不当,会影响到其隔振效果。
双层减振需要在精密仪器和基础之间插入一个质量进行减振[5],在实际的南极运输中,由于条件的限制,为了能够尽量减少运输的额外质量,将运输工具雪橇加以改造,使之成为双层减振中的第1层减振的基础,并充分发挥中间质量块的作用。
图3中:m1为南极巡天望远镜的主镜包装箱(下简称包装箱);m2为经过改造后的南极内陆地区的运输工具——雪橇;K1为包装箱与雪橇之间的减振器的弹性系数;K2为雪橇减振器的弹性系数;C1和C2分别为相应的减振器的黏性阻尼系数。假定外部运输环境的振动位移为u(t)=u0sinωt,包装箱和雪橇的绝对位移值分别为x1和x2[6],该双层减振系统的运动微分方程式为
(1)
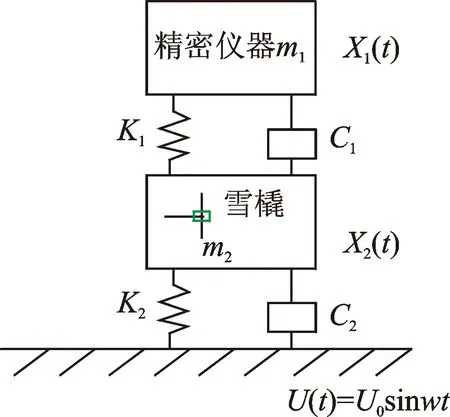
图3 双层隔振系统模型图
将式(1)改为矩阵形式
(2)
其中u(t)=Imejωt
(3)

(4)
由式(2)可得
令
(5)
所以
其中
(8)


(9)
H2(λ)=
(10)
其中
通过这些频响因子的参数可以获取输出响应
x1(t)=H1(ω)u(t)=H1(ω)u0Imejωt=
u0|H1(ω)|Imej(ωt+φ1(ω))
(11)
双层隔振时,最终精密仪器受到外界干扰时的传递系数为
(12)
隔振效率为
I=(1-TA)×100%
(13)
为了能够更加方便地定量表达隔振系统的动态性能,定义对数动力放大因子β(λ)
β(λ)=20lg|H1(λ)|
(14)
根据南极运输时的实际情况选取参数μ=2,α=1.2,ξ1=ξ2=0.1,可得如图4所示的结果。

图4 双层减振效率图
公式中的λ=ω/ω1,其实际含义表示为外界干扰频率与系统的固有频率之比ω/ωn[7]。
由图4可以看出,当在双层隔振系统中ω/ωn小于0.886时,振动传递率>1,隔振系统对于振动源没有抑制作用,反而放大了振动源的振动信号,因此干扰频率和系统的固有频率之比应该大于该值。对于振动环境整体来说,为了避免共振现象的发生,振动环境的干扰频率应该由其最低的第1峰值频率所确定。如果系统自身的固有频率设定的很小,虽然能够获得较好的隔振效率,但是会导致系统自身始终处于不稳定的状态而产生振动,可能使保证光学零件姿态的柔性铰链产生疲劳损坏,因此需要选取适时的固有频率比,以保证系统既有一定的刚度也有较好的减振效率,确保光学零件的安全[8-9]。根据表1中信号1(实测得的道路最大振动强度)第1峰值7 Hz为干扰频率f的数值。选取ω/ωn为2,则包装箱的固有频率为3.5 Hz。根据图4,当ω/ωn=2时,对应的减振效率约为80%。
2.2 减振雪橇的设计
振源产生振动,通过介质传至受振对象,因此,隔振控制的基本方法包括以下几个方面[6]:a.振源控制;b.传递过程中振动控制;c.受振对象采取控制措施。
从上海到Dome A的运输路线是经过多年的探索而形成的固定路线,而且路上产生的振动多为随机振动,该振动产生的原因主要是由于硬雪面的不平造成的。与国内普通的等级道路不同,南极地区的内陆运输道路完全为自然形成的“野路”,没法通过人为干预而改变其道路的平整度。由于每年的大气降雪量的不同,造成了雪面的起伏也不相同,因此第1步的振源控制没法做到。
传递过程中的振动控制是较为关键的一步,可以对交通工具进行改进,例如对振动最剧烈的内陆运输路段中的交通工具——雪橇进行升级和改造,达到减振的目的。
通过对内陆运输的振动数据分析可以看出,内陆运输的振动数据比普通公路的道路运输振动数据大的多,这其中南极本身的自然地貌以及路面、雪面的不平整性是主要因素,雪橇没有减振装置也是其中的一个重要原因。

图5 南极减振雪橇
普通公路中的运输车辆都会自身携带避震装置,其轮胎本身也会有一定的减振作用。从图5可以看出,雪橇没有轮胎,本身和雪面只通过雪橇脚进行硬连接,没有自带的减振措施。笔者对雪橇进行改进,在雪橇脚和雪橇钢架之间加入了8根不锈钢减振弹簧,使其能够作为类似于图3中m2位置的一个中间质量块进行第1级减振,减小道路本身对装箱产生的振动影响。雪橇的质量约为1 000 kg,选取的减振弹簧的刚度为1×105N/m, 阻尼系数ξ2为0.1。
2012年1月,第28次南极科考队成员对雪橇的减振性能进行了测试,将2台相同型号的测振仪放在同一个雪地车拉的2个不同雪橇上,如图6、图7所示,保证其经过的路段信息基本一致,所获得的外界环境的地面振动加速度值基本相同。在同一时间点上,非减振雪橇测得的最大加速度值为43g,均方根值为3.2g;减振雪橇最大加速度值为27g,均方根值为1.9g,达到了一定的减振效果,减振效率约为40%。
2.3 包装箱的浮筏式减振设计
从减振雪橇测试的数据可以看出,减振雪橇具有一定的减振效果,但是还没有达到精密光学元件的减振要求,需要进一步设计针对光学元件的第2层减振包装。笔者设计了一种针对望远镜主镜结构形式的浮筏式减振系统,用以保证望远镜主镜的安全性。

图8 浮筏式减振系统模型
浮筏式减振系统的模型如图8所示。运输架由刚度较高的钢结构组成,在运输架的6个面上安装固定低温油脂橡胶减振器,每个面分别安装4个减振器。该类型减震器可以在-40℃的低温正常工作,满足南极地区运输的需求。减振器之间放置包装箱,包装箱与减振器之间贴附摩擦因数很小的非金属材料。当产生运输振动加速度时,包装箱可以在减振器的6个面之间自由滑动。
该减振方法的优点在于运输物体的6个自由度都不受限制,可以自由地在减振器预留的空间内滑动,保证了3个方向的减振效果,并且可以承载体积较大、质量较重的精密仪器。
该系统相当于引入了一个滑动或者摩擦的表面,通过四周弹簧减振器的极限受压伸缩量限制了精密仪器运输箱的运动范围。滑动界面的材料摩擦因数应尽可能的小,保证在滑动时不受到额外的应力。当精密仪器受到地面振动产生激励时,可能在滑动和非滑动的两个阶段之间重复过渡。在分析这个模型时,引入了一个虚拟的弹簧来模拟滑动装置的静-动摩擦力,运动的结构方程为

其中:kf为虚拟弹簧的刚度;fr为摩擦力;xb为虚拟弹簧在无滑动阶段的初始伸长量;m为精密仪器的质量;mb为减振器的质量;Cb为减振器的阻尼;kb为减振器的弹性系数。
fr可以表达为
fr=±μ(m+mb)g
(15)
其中:μ为非金属材料的摩擦因数;g为重力加速度。
为满足设计所需要的固有频率fn=3.5 Hz,将精密仪器质量m=500 kg带入,选取阻尼比ξ1=0.1,得出所选弹簧的弹性系数K1=30 kN/m。
3 望远镜主镜运输包装箱的结构分析
3.1 望远镜主镜运输包装箱的静力学分析
根据上文中确定的参数以及望远镜主镜的支撑结构[10],笔者设计了主镜运输包装的模型,并对其进行了静力学分析,以保证主镜在安装后不承受大的压力。图9和图10分别为运输包装的结构图和主镜静止状态下的应力图。

图9 主镜浮筏式包装箱模型图

图10 主镜应力云图
静力学分析模型用AnsysWorkbench建立,模型的网格共划分了1 243 603节点542 819单元。图10显示,在静止状态下,镜面受到的应力为0.027MPa ,远小于玻璃的许用应力80 MPa。
3.2 望远镜主镜运输包装箱的随机振动分析
作为南极望远镜的运输工具,雪橇的类型是一致的,运输货物的质量大小及分布也是统一规格的,而且每年的运输路线是相同的,因此以前测出来的运输振动数值有一定的代表性,可以作为激励源进行模拟分析。表2为在激励信号下,主镜3个方向的响应信号加速度均方根(root mean square,简称RMS)值。为了能够准确地反映出南极运输情况下主镜包装箱的减振效果,笔者采用了在硬雪带时垂直方向均方根值最大的加速度信号作为激励(即表1中的信号1),并在分析中按照双层减振系统的数学模型(图3)带入相应的参数,模拟分析经过减振后包装箱的振动加速度的功率谱密度、响应加速度和应力的情况,从而判断该包装箱是否满足需求。
表2 主镜模拟减振效率
Tab.2 Simulated vibration reduction effect of primary mirror

振动加速度方向激励信号加速度RMS值/g主镜响应信号加速度RMS值/g减振效率/%垂直方向14.7771.81887.7左右方向 4.2260.32392.4前后方向 3.6840.31491.5
由图11~图14可以看出:垂直方向上主镜的最大响应加速度为5.3g,左右方向最大响应加速度为0.95g,前后方向最大响应加速度为0.93g,都小于玻璃产品的脆值;主镜的最大应力为0.23 MPa,小于主镜的许用应力值,因此主镜在该振动信号发生时是安全的。

图11 左右方向主镜最大响应加速度云图
图12 垂直方向主镜最大响应加速度云图

图13 前后方向主镜最大响应加速度云图
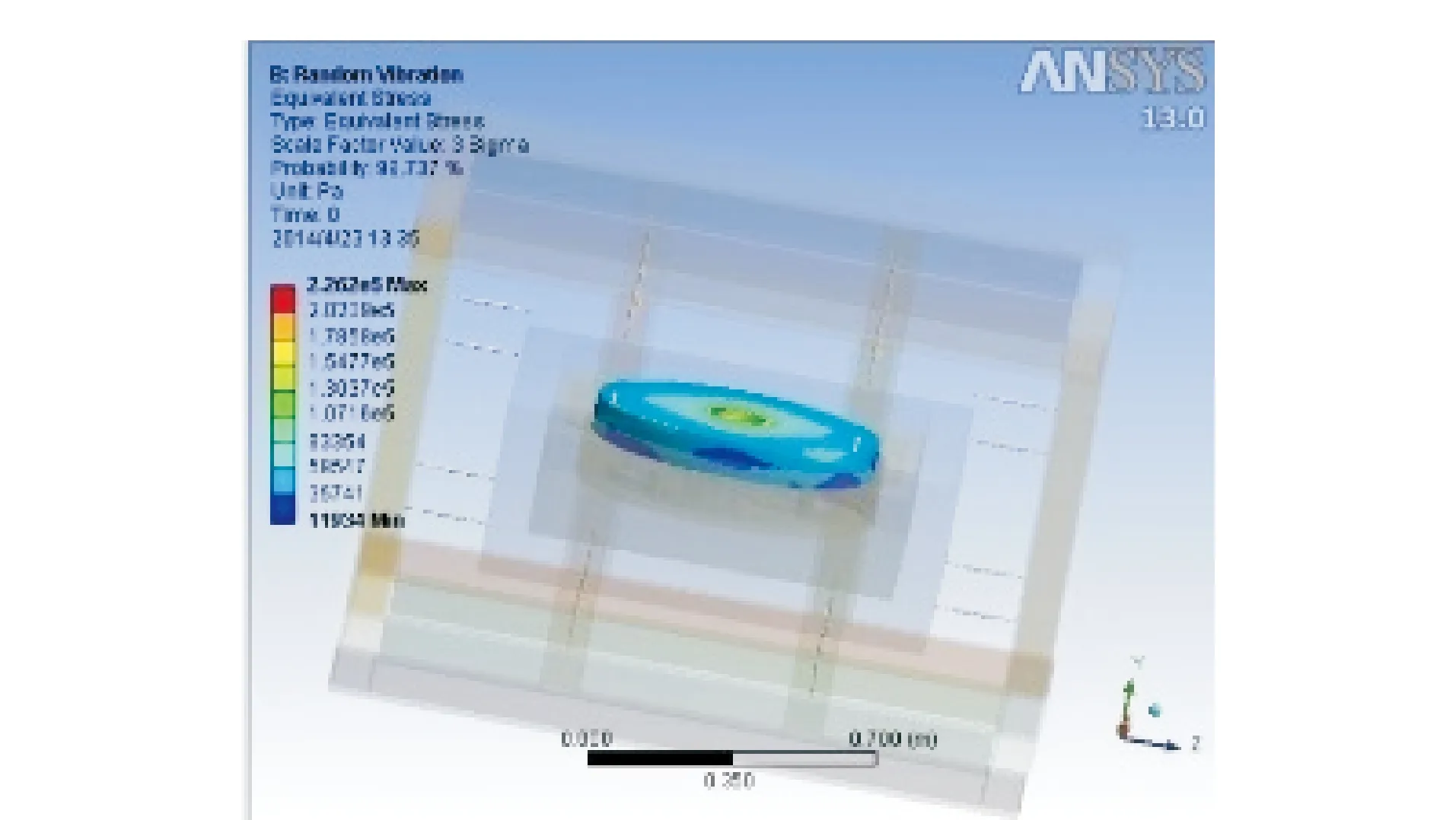
图14 瞬态主镜应力云图
4 浮筏式减振系统的测试
2013年底,南极巡天望远镜赴漠河北极村地区进行了低温测试,当地最低气温为-50℃,能够模拟望远镜在低温状态下的运行状态。在从南京到漠河的道路上对浮筏式减振系统进行了减振测试分析工作。由于是普通公路的运输,采用的是货车,不能测试减振雪橇的减振效果,只能测试双层减振中的第2层减振(即浮筏式减振系统)的减振效果。传感器布置于黄色木箱上,测试木箱收到的振动值。
由图15可以看出,外界振动环境加速度均方根值为0.783时,图16中的浮筏减振系统的振动加速度均方根值为0.289g,峰值的减振效率为63%,未达到80%预期值。其原因主要为:由于在漠河运输中采用的是大货车运输,与南极实际中的运输交通工具——雪橇有明显的区别,只能测量集装箱受到的振动数据,而该数据其实已经经过了货车轮胎的第1层减振,因此比实际环境的振动数据要小,相当于只测试了单层的浮筏式减振主镜包装箱系统的减振效率,缺少了第1层减振雪橇的减振。假定雪橇能继续保持前述分析的40%的减振效率,结合浮筏系统的63%的减振效率,那么实际的双层浮筏式减振系统的减振效率可以为83.8%,符合设计指标的需要。

图15 货车集装箱内的加速度图

图16 浮筏减振系统加速度图
从漠河测试的情况可以看出,浮筏式减振系统基本达到了减振要求,能够保证主镜的安全。
5 结束语
分析了从上海到南极的运输振动环境,确定了重点需要防范的振动加速度的时域和频域范围。根据外界振动环境的区间值,以南极巡天望远镜主镜室为包装减振对象,设计了一套双层隔振的浮筏式减振系统,用于南极内陆地区的运输,并对其进行了模拟分析及实际运输测试。从测试的结果可以看出,该套系统能够满足主镜的运输安全需求。
致谢感谢中国南极考察队在2007—2016年振动测量实验中提供的大力支持,特别感谢李院生、夏立民、金波、孙波和魏福海等同志的帮助。