汽车行驶状态无迹卡尔曼软测量
2019-12-31郭立新
郝 亮,郭立新
(1.东北大学 机械工程与自动化学院,辽宁 沈阳 110819; 2.辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
分布式电动汽车可容易实现EPS/DYC/VSS等多系统集成整车控制,而控制的关键是车辆运动参数的准确获取,但有些参数(如质心侧偏角)测量难度大、成本高,而软测量技术在车辆动力学与运动学参数上进一步应用可以有效解决这一问题.例如:文献[1-2]进行了车辆运动状态、轮胎压力和路面附着系数的卡尔曼估计;文献[3-4]提出双扩展卡尔曼,同时估计了车辆运动状态与参数;文献[5]采用双无迹粒子滤波卡尔曼,同时估计了车辆运动状态和参数;文献[6]采用扩展卡尔曼和无迹卡尔曼,同时估计车辆的侧向轮胎力,并验证了无迹卡尔曼要高于扩展卡尔曼的估计精度;文献[7-8]分别提出了无迹卡尔曼和自适应无迹卡尔曼,对车辆运动状态与路面附着系数进行估计,从两者效果实际应用角度来看均可满足实际使用需求.以上都是针对传统车辆的状态估计,而结合分布式电动汽车的特点,实现的软测量运动参数较为少见.因此,本文基于无迹卡尔曼滤波(Unscented Kalman Filter,UKF)建立了电动汽车状态软测量算法,该算法通过联合仿真,进一步验证了它的有效性.
1 车辆7自由度动力学模型
如图1所示,建立了具有纵向、侧向车速、横摆角速度和4个车轮转角7自由度动力学模型,由此可推导出动力学方程:

图1 车辆7自由度的动力学模型Fig.1 Vehicle 7 freedom degrees dynamic model
(1)
式中:u为纵向的车辆行驶速度;m为电动汽车整车整备的质量;v为侧向的车辆行驶速度;β为车辆运动质心的侧倾角;ω为车辆运动的横向摆动角速度;ax为纵向运动的加速度;ay为侧向运动的加速度;Г为绕z轴的横摆力矩;Iz为绕z轴的横摆转动惯量;δi为电动汽车的四轮转角;Fxj为车轮的纵向力;Fyj为车轮的侧向力;i,j为1(左前)、2(右前)、3(左后)、4(右后);Fw为车辆运行的空气阻力;a,b为质心至前、后轴的纵向距离;tf,tr为前、后轴的轮距.
2 魔术轮胎模型
汽车运行过程当中的纵向和侧向力分别为[9]
其中,
式中:Cx为轮胎纵向刚度;Cy为轮胎侧向刚度.
在制动和驱动模式时,滑转率为
式中:Re为车轮滚动半径;ωij为车轮转角速度;vij为车轮中心的速度;uij为车轮中心的侧速度.
垂直载荷可用下式计算:
(6)
式中:Fzp为车轮运动过程中垂向力,p为1(左前)、2(右前)、3(左后)、4(右后);hg为质心的高度.
3 UKF的软测量算法
运动状态的实时估计、模糊推理、神经网络与机理的建模都属于软测量的范畴[10],软测量不需要硬件,通过融合方便测量的参数,进而实现高成本检测参数的测量.UKF的均值和协方差预测的是一种非线性过程,可以通过无迹变换(Unscented Transformation,UT)来解决这个问题[11].UKF不忽略高阶项,与EKF相比无截断误差,因此,估计精度、稳定性方面要高于EKF.
将电动汽车运动式(1)离散化,可得
(7)
系统观测方程离散化形式为
(8)
式中:运动状态的参数为X=[u,v,ω,T,ax,ay]T;观测的输出参数为Z=[axay]T;过程控制参数为u=[δi,ax,ay];Δ(k)为过程噪声协方差;(k)为观测噪声的协方差.
(1) 西格玛的采样点X
(9)
(2) 计算这些采样点相应的权值
(10)
式中:n为正整数;l,d下标分别为均值与协方差;λ=α2(6+κ)-6为缩放的比例参数,α为有效控制西格玛点分布的状态,通常α=0.001;κ为待选的参数,取值κ=0;β≥0,决定了高阶项的动差,取β=2.
(3) 通过式(9)和式(10)得到的西格玛点集和权值,进一步得到一步的预测X(i)(k+1|k),系统状态量的预测与协方差阵为
X(i)(k+1|k)]T+Q
(11)
(4) 根据一步预测值,再次使用UT产生新的西格玛点集为
(5) 将产生新的西格玛点集带入式(8),得到西格玛点集的观测的预测值为
预测的观测均值和协方差为
(12)
(13)
4 软测量算法的仿真验证
4.1 联合仿真模型的搭建
由于Carsim整车动力学仿真软件具有参数设置灵活、离线仿真速度快、更加贴近实车实际运行情况,且提供了与Simulink的接口,可以方便进行控制算法验证等优势[12-13],整车的参数如表1所示.建立的Carsim/Simulink联合仿真平台如图2所示,对软测量算法有效性进行验证.
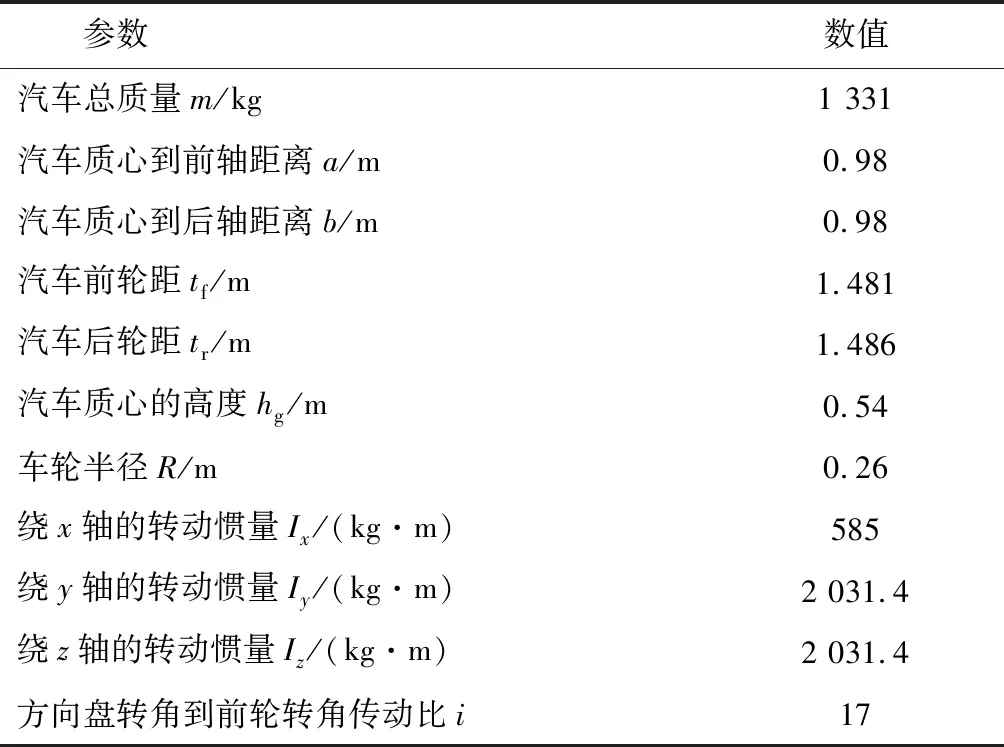
表1 电动汽车参数值Tab.1 Electric vehicle parameters
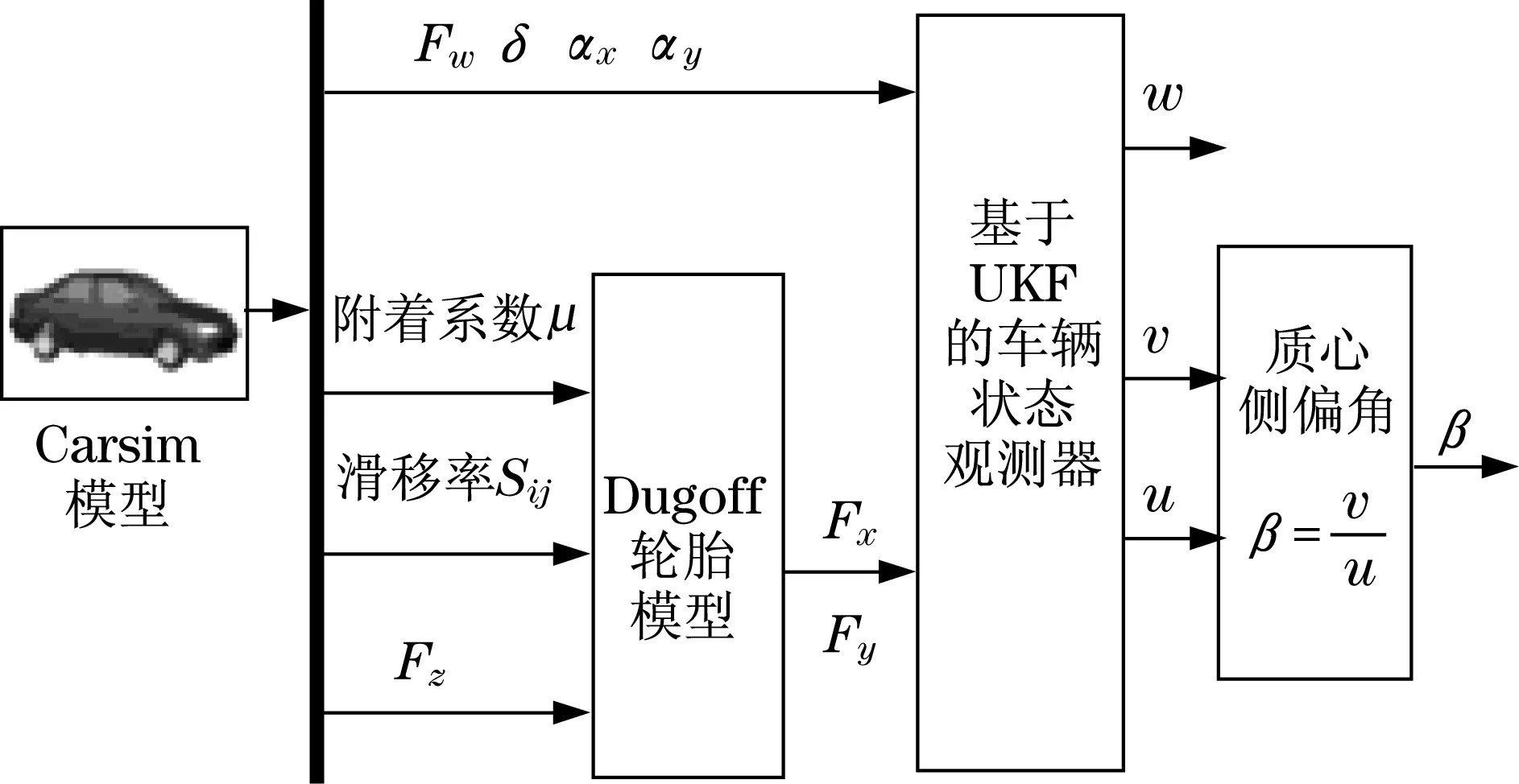
图2 电动汽车行驶状态UKF估计仿真框图Fig.2 UKF estimation simulation diagram of electric vehicle driving state
4.2 仿真结果分析
双移线实验完全按照ISO 3888-1标准规定进行设计,电动汽车初始运动状态值在Carsim中设定为x(t0)=[60/3.6,0,0,0,0,0]T,仿真时间步长设置为0.01 s,选取路面的附着系数是0.5,通过反复调试,确定了过程噪声和量测噪声的协方差阵分别是:Q=I6×6×0.01,R=I2×2×0.001.

图3 60 km/h双移线仿真实验曲线Fig.3 Simulation experiment curve of 60 km/h double lane change
通过图3(a)和图3(b)可看到,UKF的估计精度非常好,最大的相对偏差仅为0.001 4,有效证明了估计算法的准确性;图3(c)和图3(d)所示,实际运行过程中,UKF侧向车速估计值和侧向车速偏差绝对值即使中间过程有较大的波动,但是最终均能收敛于真实值;图3(e)和图3(f)可看到,横摆角速度的最大绝对值偏差出现在8 s的位置,最大偏差值并未超过0.053 rad/s,且经过14 s的时间过程,估计值收敛于实际值,达到了很高的估计精度;由图3(g)和图3(h)可知,质心侧偏角的绝对值偏差也是出现在9 s,且没超过0.006°,而且最终估计值可收敛于实际值,估计精度较高.
5 结论
依据电动汽车的7自由度动力学模型建立了UKF软测量算法,融合了低成本传感器测量的纵、横向加速度和转向盘转角信号,可以较为准确地估计车辆纵、横向速度,横摆角速度和质心侧偏角行驶状态参数.通过正弦的联合仿真实验进行了算法验证,由实验结果知UKF具有良好的测量精度和收敛性,可满足实际测量的需求.
