基于旋转反射镜目标跟踪系统研究
2019-12-20郑潇
郑 潇
(西安工业大学 电子信息工程学院,西安 710000)
随着国家军事领域的高速发展,针对高速轨道式动态目标的实时跟踪设备亟需性能的优化和效率的提升,实现对目标运动过程的精准拍摄,完成目标的运动轨迹、性能以及空间姿态等参数的有效分析,提高军事战备效率和武器精准打击率。传统的光学测量手段为等待式和随动式,随着光测技术的发展,运用反射镜辅助光学测量的手段开始发展[1]。美国的DERA Fort Halstead and ARL公司创造性地提出了反射镜跟踪器技术,研究了单个高速相机随动式跟踪技术,研发相应的产品,完成了对靶场目标运动图像的实时拍摄,突破性地解决了高速轨道式目标无法实时跟踪的历史性难题。随后英国MS公司生产了Flight Follower追踪产品,基于光学反射原理,触发相机对反射镜中的运动目标进行快速采集,与美国的DERA Fort Halstead and ARL公司产品不同的是,它是将相机与反射镜按照计算好的位置参数封装在一个透明盒子中,极大地方便了用户的使用,降低了人为搭建系统的复杂度,使跟踪准确度得到了提高。近年来,国内对反射跟踪器的研究刚刚起步,以高校和相关研究所为主要研究基地,大多数仍停留在理论研究,并未对相关实验产品进行批量生产,相关技术的成熟度较低。基于上述研究背景,本文经过对高速轨道式动态目标相关光学测量技术的深入研究,引进基于旋转反射镜的目标跟踪系统新手段,运用光学成像原理,设计了基于旋转反射镜的目标跟踪系统,研究了新型的目标跟踪方法和控制方法,建立基于旋转反射镜的目标跟踪数学模型,由高速图像处理算法调整控制曲线[2],并通过仿真实验验证系统的可行性,完成对高速轨道式目标实现较为精准的捕捉跟踪。
1 基于旋转反射镜的目标跟踪系统设计
1.1 目标跟踪系统工作原理
基于旋转反射镜的目标跟踪系统包括初速度采集系统、计算机控制系统、反射镜控制系统和图像采集系统,利用光反射原理,采用相机与反射镜结合的方式完成对轨道式目标图像的采集;利用控制单元、控制电机、平面反射镜及相机等硬件搭建能够精准跟踪轨道式动态目标的硬件平台,配合数学模型和图像处理算法,完成对轨道式动态目标在高速且变速运动状态下的快速跟踪,目标跟踪系统工作原理如图1所示。
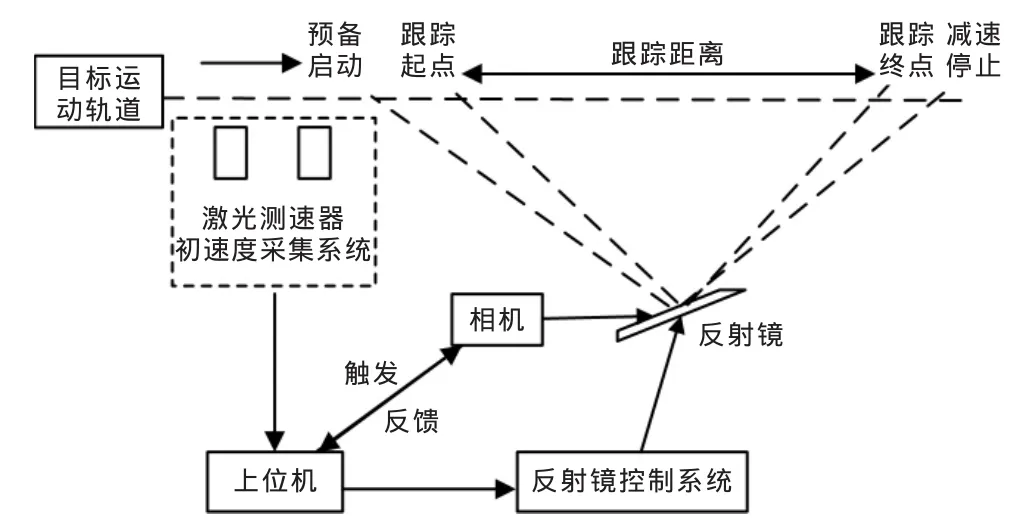
图1 目标跟踪系统工作原理图Fig.1 Working principle diagram of target tracking system
目标在运动过程中,经过初速度采集系统计算出目标的运动速度并传递给上位机,上位机根据目标速度预估目标的运动轨迹,选定控制曲线和控制参数,并传送给反射镜控制系统,并同步触发相机。当目标进入有效视场时,反射镜控制系统驱动电机以一定速度开始运动,当反射镜角速度与目标运动速度匹配时,目标的像就会由光学成像在高速相机上,并由计算机对所获序列图像进行图像处理,并根据图像处理结果调整控制曲线误差。
1.2 相机主光轴跟踪原理
目标跟踪系统基于反射成像原理实现对目标的跟踪拍摄,本文定义经过反射镜反射的相机视场为跟踪系统有效视场,系统的视场随反射镜规律性转动而变化。为了使反射镜的旋转角度和速度可以精准配合目标的运动速度,从而使高速相机精准采集到目标的运动图像,设计采用相机主光轴跟踪方式,图2为相机主光轴跟踪原理图。
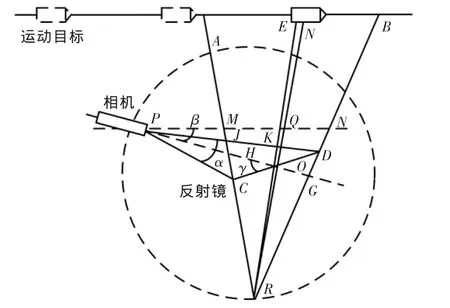
图2 相机主光轴跟踪原理Fig.2 Schematic of camera main optical axis tracking
设相机主光轴与目标弹道夹角为β,反射镜与主光轴夹角为γ,相机视场角度为α。
首先分析R点的运动,它是以O点为圆心,OP=L1为半径的一个圆,以垂足E为坐标原点,设反射镜与主光轴PO的夹角为γ,相机视场角度为α,∠HPM=β,目标点与E点的距离以轨道式动态目标的运动方向为正方向,由几何关系可得到N点的运动方程为

视场的前点A的运动方程为

视场后点B的运动方程为

系统跟踪过程中,首先将目标的坐标值转换到以E点为坐标原点的坐标中,设转换后的方程为U(t),即令 x=U(t)代入上式即可得到相机与弹道有夹角时的跟踪点、视场前点、视场后点运动位置与相机转动角度的关系。
2 目标跟踪系统数学模型建立
2.1 轨道式动态目标运动轨迹计算
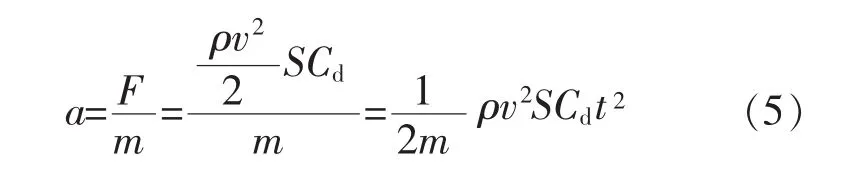
轨道式动态目标为中高速运动的轨道式目标,目标的运动过程一般经过启动加速段、稳定段、制动段3个阶段,一般试验均在稳定段内进行,此时目标的速度受到各个方面的阻力影响做变减速运动,其中空气阻力占整个阻力的左右,因此,忽略其他微小阻力影响,对目标运动状态量进行分析。
在空气动力学中,气动阻力计算公式为

式中:Fd为目标空气阻力;ρ为空气密度;v为目标相对空气的速度;S为目标最大截面积;Cd为阻力系数。
根据目标所受气动阻力以及运动方程的整合计算,可以得出轨道式动态目标的加速度方程为
最终得到目标运动方程为

2.2 反射镜转动规律计算
基于目标跟踪系统的数学模型,对反射镜的旋转参数进行研究,使反射镜的角位移和角速度可以精准匹配目标的运动速度变化,并最终完成对目标图像的实时采集,在有效跟踪区域中,目标跟踪系统的相关参数示意图如图3所示。

图3 反射镜有效跟踪示意图Fig.3 Schematic diagram of effective mirror tracking
相机的最大有效视场是φ,设D点为目标进入有效跟踪区域的起始点,M点为目标运行轨迹上的到反射镜的垂直距离的参考点,O点为反射镜位置坐标点,用H表示垂直距离MO,E点为有效跟踪区域的终止点。DO向Y轴方向旋转到PO夹角为γ,DO与轨道到反射镜中心的垂直距离MO的夹角是α,设反射镜跟踪目标的角速度为ω,根据速度矢量分解可知:

同步跟踪的本质是使得目标在CCD上所成的像与CCD器件保持相对静止,当反射镜跟踪的目标相对视场中心移动位置θ时,根据反射定律可以得知,转镜的旋转角度是θ/2,基于镜面反射原理,可以得出反射镜旋转角度及角速度随时间的变化关系:

基于目标特性分析,步进电机设置细分为4,步距角为0.45°,设电机脉冲频率为f,得出:

3 目标跟踪系统控制方法研究
通过对跟踪目标特性的分析,确定系统控制回路采取闭环控制方式,完成硬件的初始状态调整和对目标的准确跟踪。基于系统的总体设计,将反射镜控制系统分为反射跟踪和校正对准两个子系统,反射镜控制系统如图4所示,两个子系统相互配合,精确控制和驱动目标跟踪系统,完成对轨道式动态目标的实时跟踪监测。

图4 反射镜控制系统Fig.4 Mirror control system
反射跟踪系统以单片机作为控制器,驱动步进电机带动反射镜连续旋转,配合图像采集系统拍摄序列图像;反射跟踪子系统主要通过连续转动的反射镜将运动目标反射到高速相机中,拍摄得到序列图像,包括控制器、光电耦合器、驱动器、电机、光电编码器和跟踪转台,硬件如图5所示。

图5 反射跟踪子系统框图Fig.5 Block diagram of the reflection tracking subsystem
校正系统用来对目标跟踪系统的初始位置搭建进行精确调整,保证系统可以高效跟踪运动目标,本系统设计在反射镜背面设置十字丝标志,通过图像处理对对中标志进行处理检测,有效得到相机主光轴与反射镜面夹角以及与对中标志中心相交度等系统初始状态信息,完成目标跟踪系统初始硬件搭建。
4 高速图像处理算法研究
目标跟踪系统的研究对象为高速轨道式动态目标,为提高系统精度,采用高速图像处理算法作为系统反馈调整的核心方法[3],跟踪反馈系统流程如图6所示。
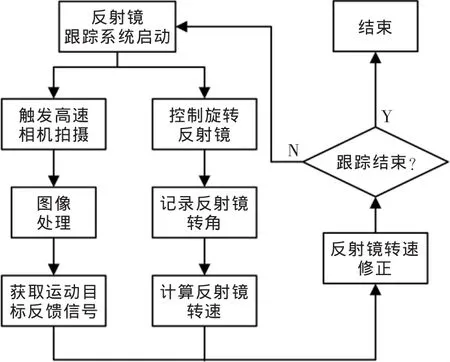
图6 跟踪反馈系统流程Fig.6 Flow chart of tracking feedback system
目标跟踪系统处理速度的快慢决定了整个系统跟踪精度高低,通过对现有图像处理算法的深入研究,选取FAST YOLO目标检测算法作为系统的反馈手段。
FAST-YOLO框架分为2个主要组件:优化的YOLOv2架构以及运动自适应推理[4],对于视频每一帧,由视频帧与参考帧组成的图像栈被传递到1×1卷积层。卷积层的结果是运动概率映射,然后将其馈送到运动自适应推断模块以确定是否需要深度推断来计算更新的类别概率映射,主要目标是引入视频中的对象检测框架,可以在嵌入式设备上更快地执行操作,同时减少资源使用,进而显著降低功耗。 通过利用这种运动自适应推理方法,深度推断的频率大大降低,并且仅在必要时才执行。
5 系统仿真
根据以上理论,设垂直距离H=50 m,目标速度0~1000 m/s,跟踪距离为100 m,视场角度变化范围为[-45°,45°],将所设参数分别代入,基于 Matlab对反射镜的旋转角度和旋转角速度进行仿真,结果如图7所示。
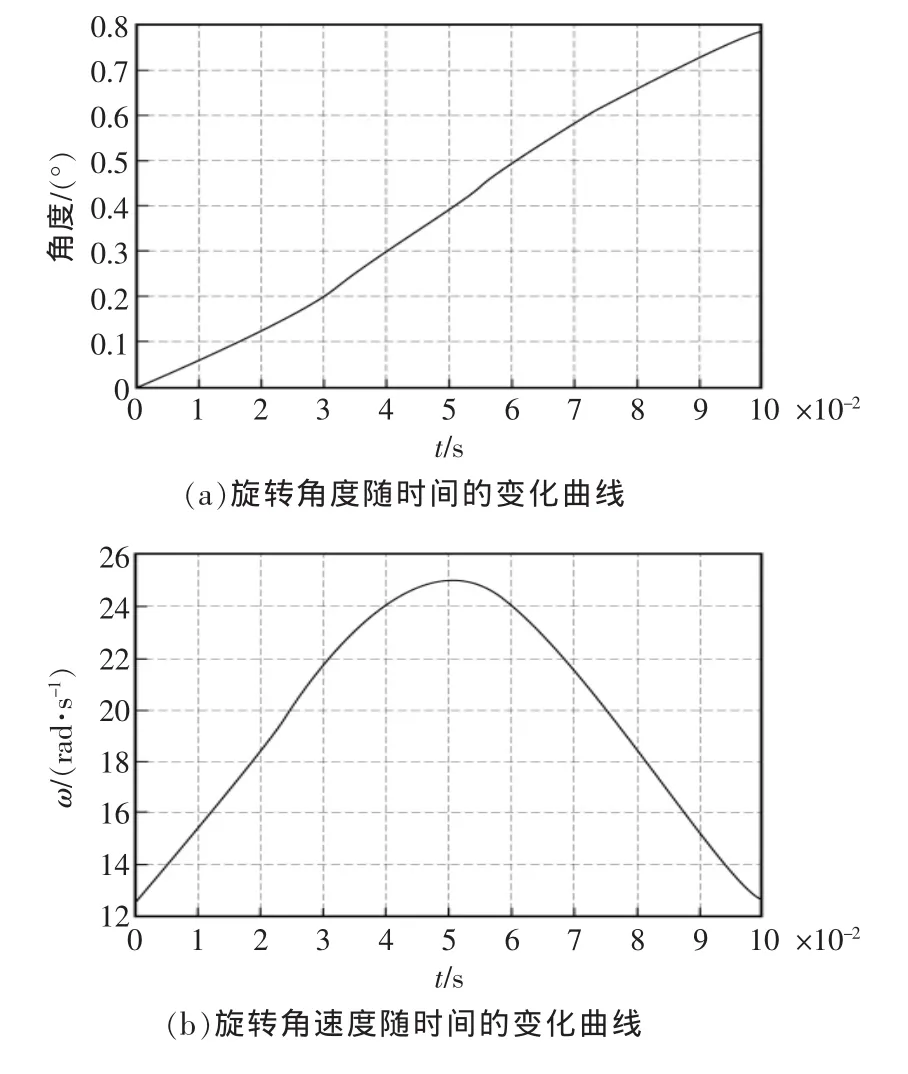
图7 反射镜旋转角度及角速度随时间的变化曲线Fig.7 Curve of mirror rotation angle and angular velocity with time
根据反射镜转动规律以及电机脉冲频率的相关数学模型,由Matlab软件仿真得步进电机工作的脉冲频率与反射镜角速度的关系曲线如图8所示。

图8 电机工作脉冲频率与转镜角速度关系曲面图Fig.8 Curve diagram of the relationship between motor working pulse frequency and rotating mirror angular velocity
通过Matlab对脉冲频率曲线的仿真,分析曲线图可知步进电机的脉冲频率变化趋势为变加速后变减速,可以进一步得到目标在此速度值和下一个速度值的转动频率变化曲线,最终提高系统的跟踪控制精度。
为了验证目标跟踪系统初步搭建后的可行性,降低速度标准,以验证控制曲线和图像处理的互适性,选取高铁为运动目标,使用目标跟踪系统采集图像,并利用FAST-YOLO对目标进行实时检测,检测结果如图9所示。
6 结语
基于目标跟踪系统的工作原理,设计基于旋转反射镜的目标跟踪硬件系统,搭建了系统数学模型,深入研究控制电机转动参数,并引入FAST-YOLO快速图像处理算法对系统误差进行调整。当目标速度范围为0~1000 m/s,跟踪距离为100 m,视场角度变化范围为[-45°,45°]时,对反射镜旋转角位移和角速度曲线进行仿真,同时对步进电机的脉冲频率曲线仿真,实现对高速轨道式目标的实时目标跟踪。
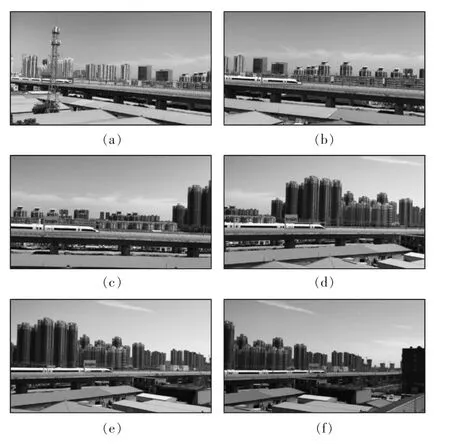
图9 FAST-YOLO算法高铁视频序列下的检测效果Fig.9 Detection effect of FAST-YOLO algorithm under high-speed rail video sequence
