基于PSoC和LIN总线的汽车脚踢控制器设计
2019-12-20韩跃平文洪奎景冰洁
王 鹏,韩跃平,文洪奎 ,景冰洁
(1.中北大学 信息与通信工程学院,太原 030051;2.东方久乐汽车电子(上海)股份有限公司,上海 200000)
汽车工业是国家一大支柱产业,汽车行业涉及众多科技技术,安全气囊控制、防撞系统、车窗防夹等等,汽车众多技术的国产化任重道远。汽车产品实现国产化,涉及到诸多专利技术,大部分的专利权在国外,即使现有的尾门控制系统有许多经济实用的技术或方法,但专利昂贵,并且国外及外资企业实行专利保护与技术封锁,所以国产汽车自主知识产权的国有化,应用于吉利等国产汽车上,具有重要的国民经济意义。释放客户双手,基于接近感应的脚部动作识别来控制尾门是当前汽车尾门控制的研究热点,脚踢控制器是汽车后尾门自动控制的核心部分。
当前国内装配有脚踢功能的汽车车型,大部分都是由麦格纳国际、博泽集团、贝肯霍夫等汽车零件龙头企业作为产品供应商,这就导致了国内汽车脚踢功能的装配成本高、普及程度低的现状。为此,设计了一种基于PSoC和LIN总线的汽车脚踢控制器,利用PSoC可编程嵌入式系统控制器内部专用的电容感应模块来实现电容的快速测量与处理,通过LIN总线通信将准确的尾门请求信号发送至BCM,实现汽车尾门的脚踢控制。
1 系统结构
1.1 脚踢控制器系统功能
PSoC内部集成了丰富的模拟和数字模块,外围电路功能都可以在芯片内部完成,降低了系统成本及复杂性,极大提高了开发效率[1]。汽车脚踢控制器需由PSoC主控制器和2个脚踢传感器共同组成,系统测量框图如图1所示。
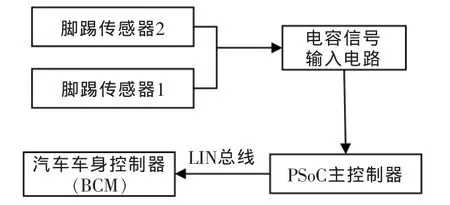
图1 系统测量框图Fig.1 System measurement diagram
由系统测量框图可知,安装于汽车后保险杠内壁的脚踢传感器进入活跃状态后,经由电容信号输入电路的滤波降噪,PSoC主控制器内部集成的专用电容感应模块会通过扫描2个脚踢传感器采集到2组表示脚踢传感器感应磁场区域内电容变化的数据,主控制器触发算法,通过对2组电容数据进行处理,判断是否为指定的踢脚动作所引发,产生准确的后尾门请求信号,采用LIN总线通信方式实现脚踢控制器与BCM信息交互,完成汽车尾门的脚踢控制,给用户带来智能化体验。
两个脚踢传感器在汽车后保的安装位置如图2所示,上方传感器定义为脚踢传感器2,近地传感器定义为脚踢传感器1。
1.2 PSoC主控的电容感应原理
电容板两块相邻的覆铜之间存在着寄生电容CP,当把其中一块覆铜连接到PSoC的模拟I/O上,另一块连接到地上,当有导体接近电极时,导体和覆铜之间产生新的电容,这些电容等于并联在CP上,随着导体的远近产生的电容会发生变化,则可通过电容的变化检测导体的存在与动作。
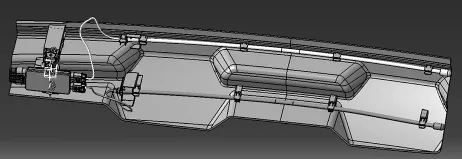
图2 脚踢传感器安装示意图Fig.2 Kick sensor installation diagram

式中:ε0为空气介电常数;εr为极板之间介质的相对介电常数;A为极板的有效面积,m2;d为两极板间距,m。
CF为导体电容,当脚踢传感器感应到导体存在,导致式中d,A发生改变,电容量CF也就跟着改变,再基于一定的测量电路将其转化为电压、电流或频率等电信号输出,就能够根据输出的电信号来判断被测物理量的大小。在控制器的设计过程中,用户可以单独调整电容感应的灵敏度,从而调整脚踢传感器磁场感应区域[2-3]。
传感器垫片与导体之间的电容值为
2 硬件设计
PSoC芯片内部集成了数据采集需要的各种数字、模拟模块和通信接口,使得传感器采集板所需的外围芯片大为减少,硬件电路大为简化[4-5]。本设计的硬件电路主要包括PSoC主控芯片连接电路和LIN通信电路等。
选用Cypress公司PSoC系列32位ARMCortex-M0内核的CY8C4240AXI单片机,引脚P1_2、P1_3连接脚踢传感器,在编译过程中被配置为CSD(CapSense Sigma Delta)模块输入端。单片机内部存储着脚踢控制器的控制程序、LIN协议控制程序。引脚P3_0、P3_1作为通用异步收发协议(UART)所定义的串行异步接口与LIN收发器通信。
LIN是一种低成本的串行通信网络,用于实现汽车中的分布式电子系统控制,LIN的目标是为现有汽车网络(例如CAN总线)提供辅助功能[6-7]。LIN总线收发器是连接LIN协议控制器和物理总线之间的接口,在LIN网络中是主机节点和从机节点所必需的器件[8-9]。采用TJA1028芯片进行LIN通信收发器接口设计,作为PSoC主控制器与LIN总线之间的物理连接。
3 软件设计
脚踢模块的软件部分主要包括PSoC的CSD模块和LIN Slave模块。脚踢控制模块程序流程如图3所示。

图3 脚踢控制器程序流程Fig.3 Kick controller program flow chart
3.1 脚踢控制器初始化
根据脚踢控制模块程序流程可知,首先要进行的是端口、CSD传感部件参数等初始化,具体设置如表1所示。
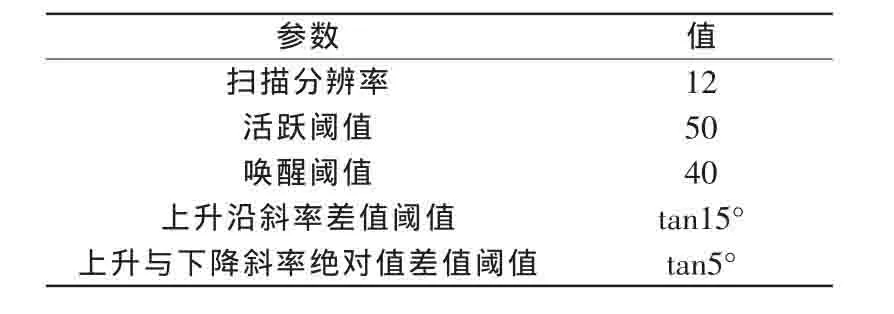
表1 控制器的阈值参数Tab.1 Controller threshold parameter
初始化成功后,在脚踢传感器感应磁场区域发生电容变化,传感器处于活跃状态,控制器扫描2个脚踢传感器后,得到2组具有上升沿和下降沿的表示电容变化的信号,称之为传感器数据(raw)。控制器通过传感器数据与电容模块基准线的差值得到传感器信号(differ)。
3.2 脚踢信号判定
在控制器的设计过程中,规定在距离后汽车保险杠约10 cm左右,平脚深踢动作是标准的踢脚动作,执行时间为2 s。控制器进入正常工作模式后,触发算法得到2组变化的传感器数据与传感器信号,按时间将脚部动作分割为踢入与踢出两部分,以此主观地对传感器数据与传感器信号进行离散化,给定 n 个数据点(xi,yi)(i=0,1,...,n-1),用直线 y=ax+b来做回归分析,其中a,b为回归系数,采用最小二乘法来确定,使式(2)的值达到最小:

根据极值原理,a与b满足下列方程:
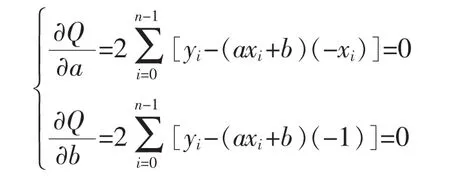
从而解得:
踢入、踢出过程中传感器数据的斜率按照式(3)、式(4)进行计算,x为存储时间,y为传感器数据,判断是否为标准脚踢信号的算法分三步。
第一步 针对所设计的标准踢脚动作与传感器的安装方式,传感器1感应到的电容变化始终比传感器2的变化更明显,故sum-differ1与sum-differ2差值为真,sum-differ为传感器信号值的累加和。
第二步 针对两脚踢传感器所感应到的动作是否唯一,a1-rasing与a2-rasing的差值应小于两上升斜率差值阈值,其中a1-rasing、a2-rasing为踢入、踢出过程中传感器数据的上升沿斜率。
第三步 针对标准踢脚动作特性,判断脚部在传感器感应区域进入和离开的方式是否相似。a1-rasing与a1-falling的差值、a2-rasing与a2-falling的差值应小于上升沿与下降沿斜率差值阈值,其中a1-fallinga、a2-falling为踢入、踢出过程中传感器数据下降沿斜率的绝对值。
所有判断都通过后,控制器判定该信号为标准脚踢信号,产生后尾门请求信号,通过LIN总线通信方式发送给BCM;如果任意一条不通过,控制器会在3 s之后进入低功耗工作模式。
3.3 脚踢控制器的LIN通信设计
脚踢控制系统采用BCM作为主机模式,脚踢控制器作为从机模式,通过LIN总线把二者连接起来组成一个小的LIN网络。脚踢模块作为LIN通信网络中的从机节点,负责接收和响应报文,从机节点的流程如图4所示,首先对涉及的变量、输入输出端口以及驱动函数初始化。然后主机节点BCM采集本地各控制开关的状态产生控制指令,并将指令发送转换为LIN报文,通过LIN网络发送给从机节点脚踢模块,PSoC控制器接收到与自己相关的报文后对报文进行拆解、解读,根据获得的指令判断是否发出后尾门请求信号。

图4 LIN通信流程Fig.4 LIN communication flow chart
脚踢控制器作为从机进行信号帧定义主要有3帧,BCM_1(0x30)包括汽车行车模式信号,运车模式、停车模式等;BCM_2(0x31)包括了汽车各个状态信号,车型配置字信号等;HFA(0x39)包括了脚踢与主机BCM通信所需的脚踢信号与异常信号,脚踢信号、传感器脱落信号等。
PSoC的LIN Slave模块会发送一个 “响应错误”的状态来报告自己的状态,BCM对脚踢控制器的“响应错误”进行检测[10],当接收到“响应错误”的值为“1”时,BCM将响应的故障诊断代码设置为测试失败;当接收到“响应错误”值为“0”时,该诊断代码被设置为通过。当脚踢传感器感应到标准踢脚动作后,产生正确的后尾门请求信号,若LIN总线通信通过,则脚踢信号发送至BCM,后尾门自动开启;若通信失败,则进入通信失败状态,4 s后模块进入低功耗模式。
3.4 脚踢控制器工作模式的切换
脚踢控制器主要有2种工作模式,正常工作模式和低功耗工作模式。低功耗工作模式下,PSoC主控制器处于睡眠模式,系统整体能耗极低,对汽车安全具有重要意义。汽车在一般状态下脚踢控制器都处于低功耗工作模式,在脚踢传感器进入活跃状态后,进行控制器唤醒判断,进而进入正常工作模式。
针对控制器的唤醒判断,触发算法后,每20 ms采集1次传感器数据与传感器信号,连续采集10次,通过对这2组数据的算法分析,判断脚踢控制器是否满足唤醒条件,该算法主要有2条原则:
(1)传感器感应顺序的判断,即脚踢传感器1的传感器数据始终高于脚踢传感器2的传感器数据;
(2)判断通过2个传感器每次采集到的differ值始终高于唤醒阈值。
如果2条原则都满足,认为模块满足唤醒条件,唤醒后进入正常工作状态,触发判断是否为标准踢脚信号的算法;如果任一条原则未满足,则模块不唤醒,维持低功耗工作状态。
4 实验及结果分析
根据上述测量原理搭建测试装置,以验证系统一致性和后尾门请求信号的准确性。在装置下方进行多种模拟工况下的传感器数据与传感器信号的采集,可以看到控制器通过脚踢传感器可以稳定地识别标准踢脚动作的发生,图5~图7分别为标准脚踢(平脚深踢)工况、干扰踢脚(平脚深横扫)工况、人在装置后方走动工况3种常见工况的传感器数据。由图5可以看出,人路过的过程中未能唤醒模块。由图6、图7可以看出,实验装置在检测到脚部动作深横扫和平脚深踢的过程中,脚踢控制器正常唤醒。

图5 人走动Fig.5 Human walking
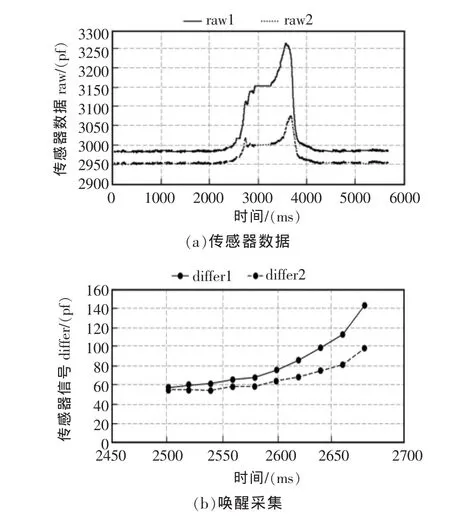
图6 平脚深横扫Fig.6 Flat foot sweep
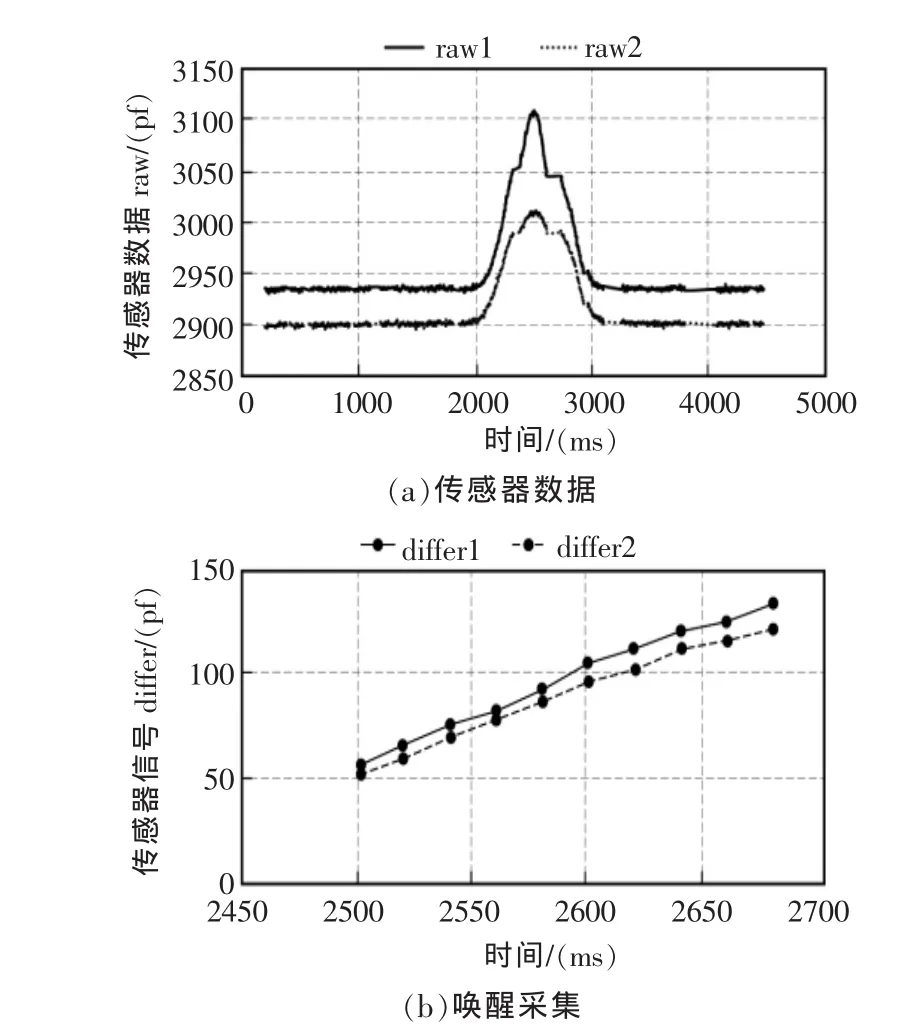
图7 平脚深踢Fig.7 Flat foot kick
在脚踢控制器由低功耗模式切换为正常工作模式后,对引起该变化的原因进行分析,判断是否为标准踢脚动作所诱发,由表2分析可知,在平脚深踢的动作下,sum-differ1与sum-differ2差值为真,a1-rasing与a2-rasing的差值小于两上升沿斜率差值阈值,a1-rasing与 a1-falling的差值、a2-rasing与a2-falling的绝对值差值小于上升沿与下降沿斜率差值阈值,符合标准踢脚信号的判断条件,故脚踢信号置位为01;在平脚深横扫的动作下,sum-differ1与sum-differ2差值为真,a1-rasing与a2-rasing的差值大于两上升沿斜率差值阈值,a1-rasing与a1-falling的差值、a2-rasing与a2-falling的绝对值差值小于上升沿与下降沿斜率差值阈值,不符合标准踢脚信号的判断条件,故脚踢信号不置位。

表2 阈值计算结果Tab.2 Threshold calculation result
连续重复进行标准的踢脚动作,即脚从外侧天线下方伸展到内侧天线下方并在2 s内收回。多次实验结果表明,脚踢控制器在不同工作模式下性能稳定,脚踢传感器在感应到满足阈值的电容变化后,控制器会唤醒,万用表测量工作电流可知,休眠静态电流为125 μA,唤醒后工作电流为4.1 mA;实验过程中,只有在标准踢脚动作发生后,PLIN上位机界面可以观察到HFA_R_OperReq信号发生置位。
采用LIN总线报文显示软件来模拟BCM与脚踢控制器的通信,打开PLIN-View Pro,导入LDF文件后,打开LIN通信,在控制器感应到标准踢脚动作后,可以检测到HFA信号帧的脚踢信号HFA_R_OperReq置位为01,如图8所示。
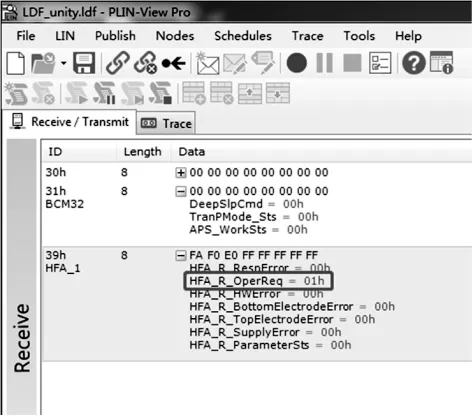
图8 LIN总线报文Fig.8 LIN bus message
5 结语
设计了一种基于PSoC和LIN总线的汽车脚踢控制器。利用32位单片机CY8C4240AXI的专用电容感应模块,将传感器感应到的电容变化量进行处理,开发设计简单、成本低、体积小、性能稳定。采用TJA1028芯片进行LIN通信收发器设计,当脚踢模块感应到正确的踢脚动作后,将准确的后尾门请求信号通过LIN通信方式发送至BCM,实现对后尾门的控制,通信稳定。脚踢控制器处于休眠模式时,功耗低,环境适应力强,未具有良好的功耗模式转换功能。实际实验表明,该控制器能够准确的识别踢脚动作,产生后尾门开关请求信号,正确的控制后尾门,可达到实际应用要求。
