基于认知的战场电磁环境侦察技术
2019-12-18胡新宇
胡新宇
(中国航天科工集团八五一一研究所,江苏 南京 210007)
0 引 言
电子侦察系统用于截获敌方辐射源发出的电磁信号,并进行识别、分析和定位,完成对战场电磁环境态势的感知,具有抗打击能力强、作用范围广、隐蔽性好等优势,是现代军事侦察不可缺少的重要手段。
但是,近年来随着雷达技术和通讯技术的迅猛发展,电子侦察系统所面对的电磁信号环境日益复杂。在复杂电磁环境中,电子侦察系统所感知的电磁信息复杂多样,传统的电子侦察系统缺乏灵活性,对复杂电磁环境的感知能力有限,难以应对日益复杂的战场电磁环境。
基于认知的战场电磁环境侦察技术具有对外界电磁环境的交互学习能力,可以根据电磁环境的实时变化,不断积累经验,丰富知识库,及时优化工作参数并调整系统状态,作出适当反应,增加设备的灵活性,能够更好地适应复杂战场电磁环境。同时,通过全面感知电磁环境中目标辐射源的工作方式、参数、方位等信息,可以对敌方辐射源的技术体制、活动规律等情况进行智能分析,推断出对方意图,并对临近时刻的电磁态势变化给出预测,实现对战场电磁态势准确和快速的感知。
1 工作流程
基于认知的战场电磁环境侦察技术流程如图1所示。
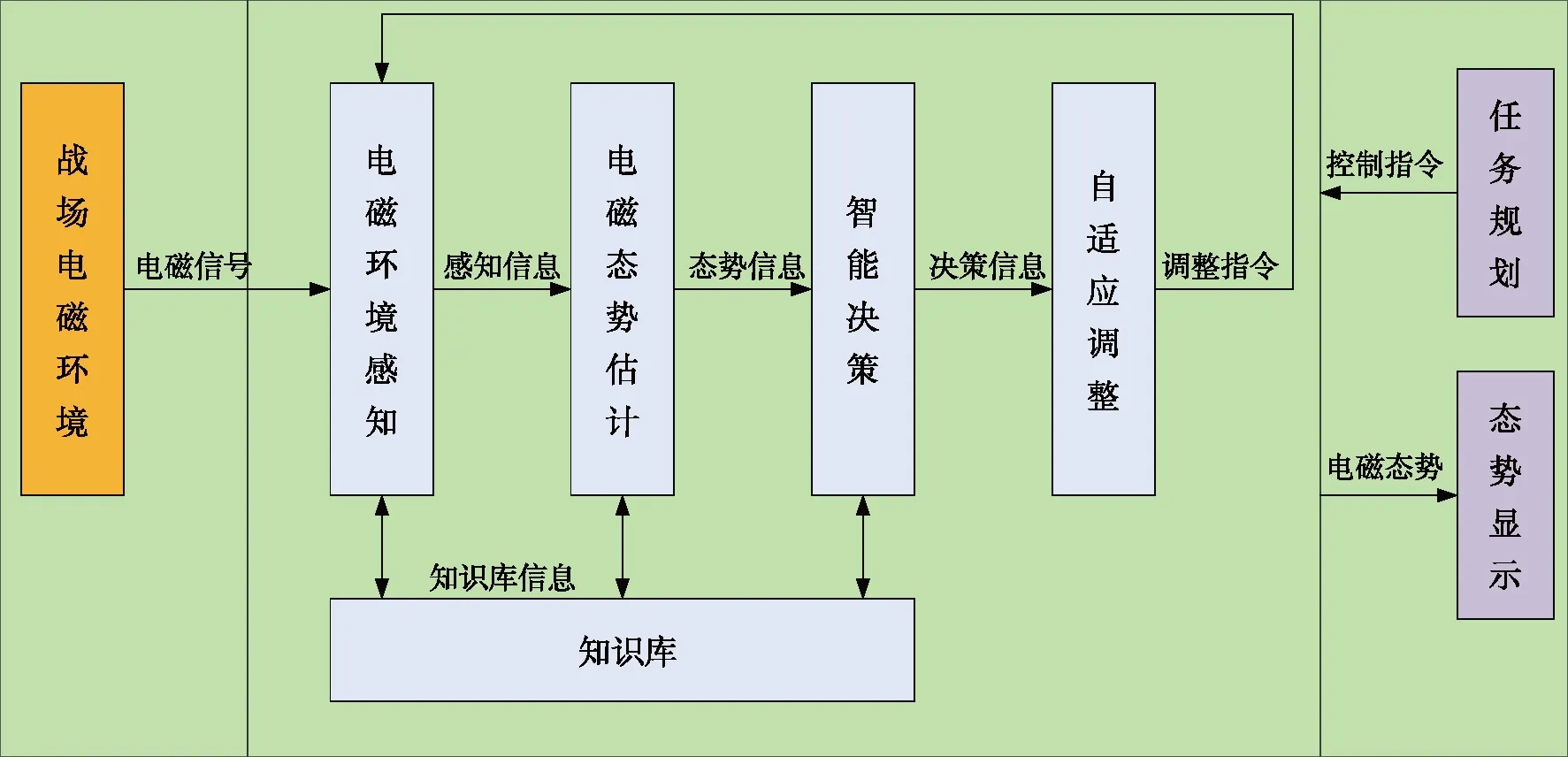
图1 基于认知的战场电磁环境侦察技术流程Fig.1 Process of cognition-based reconnaissance technology in battlefield electromagnetic environment
具体的工作流程描述如下。
1) 电磁环境感知:完成相应的电磁环境信号侦收任务(信号检测、参数测量等),结合知识库的先验知识,对侦收到的信号进行分析识别,完成对外界电磁环境的感知,并进行相应的知识更新。
2) 电磁态势估计:结合知识库的先验知识,对电磁环境的感知信息进行处理、分析,进行相应的知识更新,完成电磁态势信息的估计,并传输至人机交互系统进行态势显示。
3) 智能决策:结合知识库的先验知识,对电磁态势信息进行分析,形成决策信息,用于优化侦察系统对外界电磁环境的感知策略(主要包括工作模式、侦测算法等),并进行相应的知识更新。
4) 自适应调整:根据决策信息和系统的软硬件状态,自适应地规划出满足规划需求的调整指令,引导电磁环境感知单元完成相应的感知任务调整(自主实现各种工作模式切换、自主选择针对性的处理算法等),从而适应快速变化的复杂电磁环境,并以最优策略完成对目标信号的电子侦察。
2 电磁环境感知
2.1 电磁环境感知单元的定义及功能
电磁环境感知单元主要用于完成对复杂电磁环境中辐射源信号的感知(信号检测、特征提取、分析识别),并根据任务调整指令完成相应的任务调整(参数调整、功能重构),功能主要包括:
1) 辐射源信号检测、参数测量、特征提取、型号识别及个体识别;
2) 感知任务参数(工作模式、工作带宽等参数)的调整;
3) 感知任务功能(信号检测、脉内分析,个体识别等功能)的软件重构。
2.2 电磁环境感知单元的工作流程
电磁环境感知单元的具体工作流程如图2所示。
1) 通过任务调整控制单元接收调整指令,完成对侦收任务参数(工作模式、工作带宽等参数)的调整和对侦收任务功能(信号检测、脉内分析、细微特征生成等功能)的重构工作。
2) 通过侦察天线接收外界电磁波信号,经微波变频单元给出多路中频信号,中频信号发送至后续的数字信号检测单元中进行信号检测处理,对检测出的信号进行信号特征提取处理,信号特征主要包括常规特征(脉宽、方位、到达时间、功率、测频等)、细微特征(脉内无意调制特征、脉间无意调制特征)。结合知识库的先验知识,对提取的信号特征进行分析识别,实现辐射源信号的型号识别与个体识别,完成对复杂电磁环境中辐射源信号的感知。
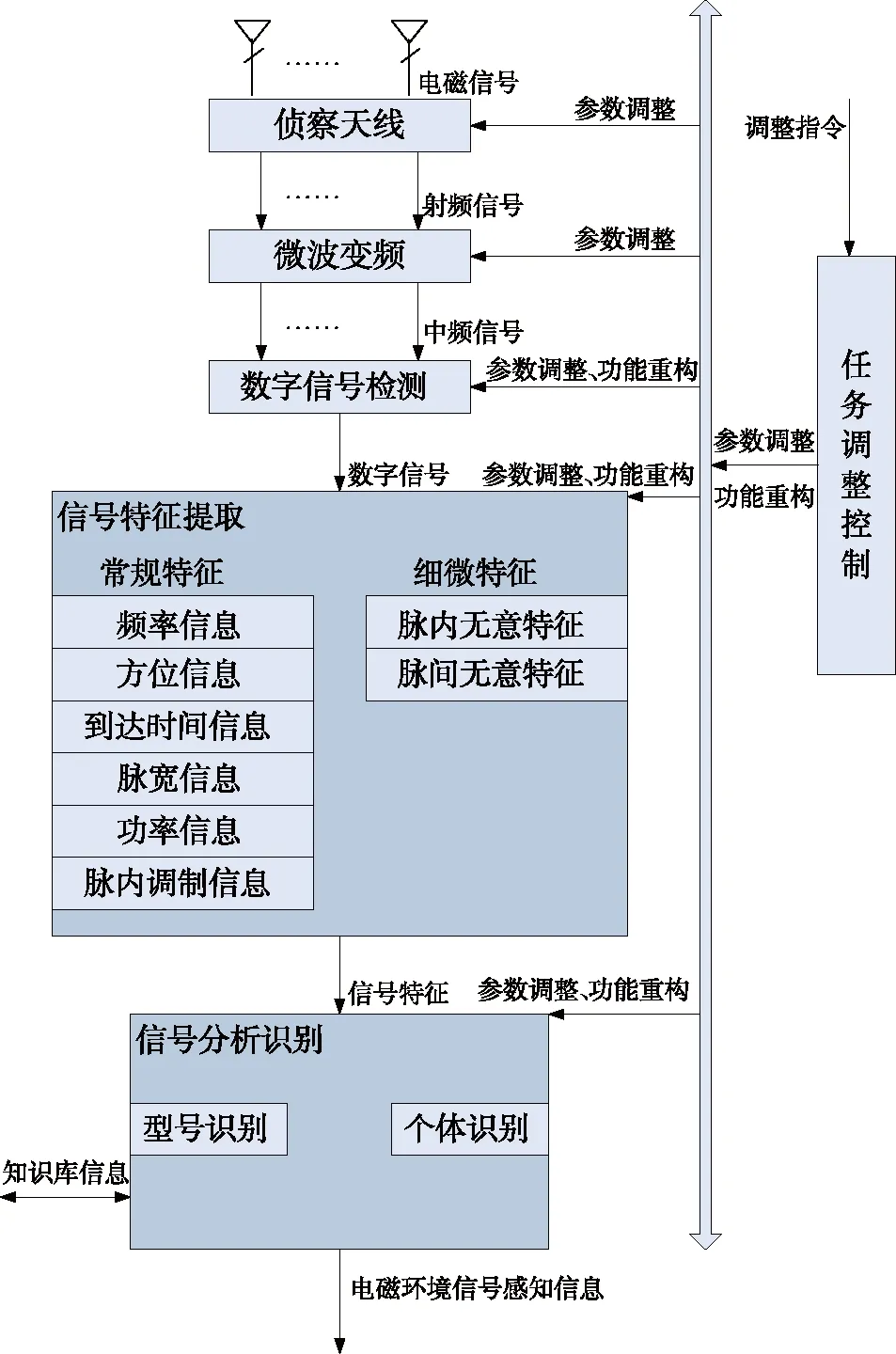
图2 电磁环境感知工作流程Fig.2 The workflow of electromagnetic environment perception
3 电磁态势估计
电磁态势估计是指对电磁环境的感知信息进行处理、分析,挖掘其背后隐藏的深层次信息,通过电磁环境要素的获取、理解、预测而形成的一种易于理解并能辅助决策的电磁环境表达方式,主要包括电磁环境构建、事件提取、事件关联与电磁态势生成。
3.1 电磁环境构建
构建当前电磁环境下的各个辐射源的状态信息,可表示为
ST(t)={ST1(t),ST2(t),…,STn(t)}
(1)
式中:STi(t)(i=1,2,…,n)是第i个辐射源在时刻t时的状态信息集合,以多元组形式表达为
STi(t)={T,F,L,E,Po,Id,K}
(2)
式中:T表示时域特性;F表示频域特性;L表示空域特性;E表示功率域特性;Po表示极化域特性;Id表示敌我属性;K表示类型属性。
3.2 事件提取
辐射源事件指目标辐射源在一定态势空间和时间下发生的具有一定意义的行为。辐射源事件提取是对辐射源的状态信息进行比较、分析、判断,提取出反映电磁环境态势变化的行为,可表示为
I={I1,I2,…,In}
(3)
其中,Ii(i=1,2,…,n)是第i个辐射源的辐射源事件集合,可以多元组形式表达为
Ii={O,M,C}
(4)
其中:O表示辐射源开/关机情况;M表示辐射源目标机动情况;C表示辐射源工作模式调整情况。
3.3 事件关联
辐射源事件关联的结果是形成如Y→Z的推理式,其中X,Y是属于I的两个集合。通过关联处理,可以发现辐射源之间的关系,挖掘背后隐藏的深层次信息,最终将其上升为能够支撑决策的情报。具体过程如下所示。
1) 在时间轴上进行分段,每段标记为一项事务,可表示为:D={I(t1),I(t2),…,I(tn)},其中I(ti)(i=1,2,…,n)是第i个时间段的辐射源事件集合。
2) 计算关联规则X→Y的支持度,支持度为数据库中包含X∪Y的事务占库中所有事务的比值。
3) 计算关联规则X→Y的置信度,置信度为数据库中包含X∪Y的事务与包含X的事务数比值。
4) 找出所有支持度、置信度超过门限的关联规则X→Y。

支持度和置信度这两个概念的关键作用在于能够衡量关联规则的重要程度。通过一组数据,往往能够得到多个不同的关联规则,只有那些支持度和置信度满足要求的关联规则才能真实反应辐射源之间的关系。
3.4 电磁态势生成
基于对电磁态势元素的综合分析来解释和表示战场情景,指出目标辐射源的行为模式,推断出作战意图,并对临近时刻的电磁态势变化给出预测。
3.4.1电磁态势知识库
电磁态势知识库的作用是描述与电磁域相关的作战计划方面的知识,只有在具备这些知识的基础上,通过适当的推理机制才能够理解目标辐射源当前的行为并预测其下一步的行动,其推理能力很大程度上依赖于所存储知识的正确性、可用性与完备性。
态势知识库采用目标/计划/事件的3级层次结构,在这个层次结构中包含了目标辐射源可能的军事目标及各目标辐射源通过协同达到这个目标的方式,其结构如图3所示,其中:
1) 事件(辐射源事件)描述的是目标辐射源在一定态势空间和时间下发生的具有一定意义的行为。
2) 计划描述的是目标辐射源协同完成目标的过程,表现为辐射源事件的关联。
3) 目标描述了计划的最终意图,即目标态势。

图3 电磁态势知识库结构Fig.3 Knowledge base structure of electromagnetic situation
3.4.2态势推理
态势推理结果为形成如Y→Z的推理式,其中Y为目标辐射源的关联规则,Z为作战意图。具体过程如下所示。
1) 在时间轴上进行分段,每段的辐射源关联情况可表示为:H={G(t1),G(t2),…,G(tn)},其中G(ti)(i=1,2,…,n)是第i个时间段的辐射源关联规则集合,每个关联规则标记为一个行动。
2) 将每个行动与知识库中的先验知识进行匹配,如果匹配程度超过预设门限,则说明观测到的行动与此先验知识足够匹配,此匹配的先验知识就可以用来解释当前的战场态势。
3) 推断对方的作战意图:匹配上的先验知识中的目标就代表着对方的作战意图。
4) 根据匹配上的先验知识,可以推理一些未被发现的辐射源、过去未发现的事件、将要发生的事件等。
3.4.3态势预测
电磁态势预测是在对当前电磁态势理解的基础上,对未来可能出现的电磁态势进行预测,即根据历史和当前的电磁态势来估计未来的战场电磁态势。本文重点研究基于马尔科夫过程预测的电磁态势预测技术。
事物总是随着时间而发展的,因此事物与时间之间有一定的变换关系。在一般情况下,人们要了解事物未来的发展状态,不单要看到事物现在的状态,还需看到事物过去的状态。而马尔科夫过程则是另外一种情况,事物的发展状态只与现在的状态有关,与事物之前的状态无关。
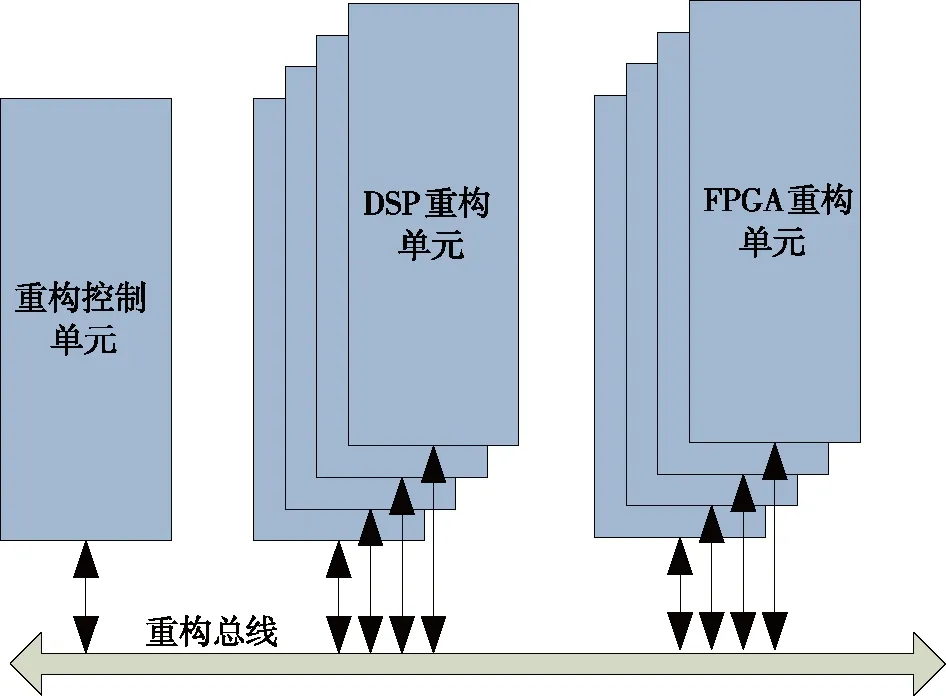
马尔科夫过程的定义为:设{Xt,t∈T}为随机过程,若对任意正整数及t1 P{Xt1=x1,…,Xtn-1=xn-1}>0 (5) 且有条件分布 P{Xtn≤xn|Xt1=x1,…,Xtn-1=xn-1}= (6) P{Xtn≤xn|Xtn-1=xn-1} 则称为马尔科夫过程。 基于马尔科夫过程的电磁态势预测过程如下。 1) 将历史态势元素信息(S)在时间轴上进行分段,可表示为S={S(t1),S(t2),…,S(tn)},其中S(ti)(i=1,2,…,n)是第i个时间段的目标态势信息。 2) 建立目标态势状态转移矩阵,可表示为 (7) 式中:P(xi|xj)=P(xi,xj)/P(xj),i、j=1,2,…,m;xi、xj为第i、j个目标态势状态;P(xi)、P(xj)第i、j个目标态势状态在未来变化的稳定概率。 3) 求解目标态势状态在未来变化的概率,可表示为 [PA(x1)PA(x2)…PA(xm)]= [PA(x1)PA(x2)…PA(xm)]× (8) 式中:PA(xi)(i=1,2,…,m)为敌方下一步采取电子战行动的概率, 对敌下一步行动按概率进行排序即可预测敌方可能采取的行动。 在现有的电子侦察载荷系统中,电磁环境感知策略的决策都是由人工完成的。随着电磁环境日益复杂,在动态多变的任务环境下(例如侦察环境发生改变、侦察目标状态发生变化、侦察任务临时发生变化等),一般都需要很长的时间对电子侦察载荷重新进行规划方案调整,这会导致侦察任务无法及时完成,出现大量无用的侦察数据,错过对重点目标辐射源的实时侦察。 智能决策规划根据对外界电磁环境的态势感知结果,同时结合知识库中的先验信息,通过智能决策算法,动态生成决策信息。生成的决策信息并非固定不变,而是在对感知信息的积累中不断增加新知识并更新知识库,不断修正和改进决策算法,具有决策活动效率高、实时性强等特点。 智能决策包括静态决策、动态决策两种决策机制。 1) 静态决策:针对有先验知识的情况,选择知识库中预先设定的与感知结果相对应的策略。静态决策的策略预先存储在知识库中,使用时不需现场计算。 2) 动态决策:电磁环境中往往会出现大量的无先验知识的辐射源,针对这些没有先验知识的情况,智能决策功能单元通过智能决策算法动态生成决策信息。 智能决策主要用于自主实现各种工作模式切换、自主选择针对性的处理算法等,主要的决策内容如下。 1) 工作模式 根据不同的外界环境,选择适合的工作模式,完成侦察任务。如针对复杂的电磁环境,首先选择搜索模式,在整个侦察空域、频域内进行大范围搜索,搜索到目标信号后,切换到跟踪模式,实现对目标信号的连续跟踪监测。 2) 工作带宽 工作带宽的选择与工作模式、侦收目标相关。当工作在搜索模式时,为了提升在频域的搜索效率,应选择较大的工作带宽;当工作在跟踪模式时,应根据被跟踪的目标信号带宽,选择匹配的工作带宽。 3) 测向定位算法 测向定位算法的选择与对目标信号的侦收情况有关。如果只有一个侦察站收到目标信号,一般选择数字干涉仪测向、比幅测向、相位差变化率定位等单站测向定位算法。如果有多个侦察站收到目标信号,可选择测向交叉定位、多基线时差定位、多基线频差定位等多站测向定位算法。 根据系统的软硬件状态,将决策信息转化为满足规划需求的调整指令,引导电磁环境感知单元进行工作参数调整与功能重构,完成感知策略的自适应调整,调整内容包括侦察系统的工作模式、信号侦测所采用的具体算法等。通过对电磁环境感知单元的自适应调整,可优化对当前面临的电磁信号的感知。 工作参数调整主要用于调整信号感知单元的侦测参数,主要包括工作模式、工作带宽、检测门限、放大链路增益等参数。 功能重构主要用于重构信号感知单元的功能模块,其中功能重构设计包括以下2个方面。 1) 可重构硬件模块化设计 可重构是指系统利用硬件计算单元可以多次重新配置的特性,使得模块具有灵活、易于升级等特性。硬件计算单元包括现场可编程门阵列(field-programmable gate array, FPGA)、数字信号处理器。 FPGA可重用资源的基本单位是可编程的逻辑块和可编程的连线资源,根据硬件配置文件中的编程信息,可以改变逻辑块的功能和连线的互连方式,从而改变模块功能。 数字信号处理器可重用资源的基本单位是指令,执行不同指令组成的程序,可以改变处理器的功能,从而改变模块功能。 可重构硬件框图如图4所示。 图4 可重构硬件模块原理框图Fig.4 Principle block diagram of reconfigurable hardware module 2) 可重构软件模块化设计 电子侦察载荷的侦察功能软件实现辐射源信号检测、参数测量、测向/定位、个体识别等功能,各种功能按照模块进行设计,分解成:信号检测模块、信号分选模块、角度/位置解算模块、数据采集存储模块、个体识别模块。 电子侦察载荷的侦察功能采取可重构设计,可以按照功能选择各种相应的软件模块,组合在一起实现不同的侦察模式。具体模式及其组成如下。 a) 测向/定位模式:测向/定位模式的主要功能是完成辐射源信号的检测、参数测量和测向/定位处理,主要由信号检测模块、信号分选模块、角度/位置解算模块完成。 b) 侦察数据采集模式:侦察数据采集模式的主要功能是完成辐射源信号的检测、参数测量和数据采集存储,主要由信号检测模块、数据采集存储模块完成。 c) 个体识别模式:个体识别模式的主要功能是完成辐射源信号的检测、参数测量和个体识别,主要由信号检测模块、信号分选模块、个体识别模块完成。 传统的电子侦察系统缺乏灵活性,对复杂电磁环境的感知能力有限,难以应对日益复杂的战场电磁环境。针对复杂电磁环境的上述特征,本文研究了基于认知的战场电磁环境侦察技术,在传统的电子侦察系统中引入智能处理、软件无线电、认知无线电等技术,使系统具备自校正、自学习、自反馈等动态自主调节适应的能力,有效解决了复杂电磁信号环境适应能力较弱等问题,实现了自主环境感知、评估判断、自主规划、自主执行过程闭环,提高了系统的智能化水平和对战场电磁环境的感知水平。4 智能决策
4.1 智能决策定义
4.2 智能决策机制
4.3 智能决策用途
5 自适应调整
6 结束语
