手术机器人规范化培训系统的构建
2019-12-16王小芹
王小芹 杨 琨 黎 勤 郑 航
经验不足的主刀医师会给患者造成难以弥补的损伤。“永远不在患者身上做第一台手术”是外科技能培训的原则,外科技能培训一直是世界各国医学教育的重中之重。近年来,随着虚拟现实技术的发展,外科技能培训的手段也由经典的模型-动物实验模式,进入到更高效的高仿真模拟-动物实验模式。
目前,以达芬奇手术机器人系统为代表的外科微创手术技术广泛应用到泌外、普外、妇科、耳鼻喉和乳腺外科等诸多领域。其全新的人机工程设计和手术本身的复杂性对主刀医生提出了更高的要求,同时也给机器人技术培训带来了新的挑战。
2013年,美国食品和药品监察局(food and drug administration,FDA)通报了3697例手术机器人的不良事件,大多数是由于不熟悉机器人和缺乏系统培训导致[1]。基于此,美国内镜协会(society of american gastro-enterology surgery,SAGES)和机器人外科协会(minimally invasive robotic association,MIRA)再次强调[2]:外科医生在使用机器人进行人体手术之前,必须进行专业训练。而且提出,训练中严格的培训手段和量化的考核标准同等重要。
手术机器人培训中心的核心任务为:帮助医师养成良好操作习惯以降低犯错几率,缩短外科医生在手术室的学习曲线,对外科医生及其团队资质进行准入审核。和其他培训一样,机器人系统化培训的流程是:让学员进入优化设计的培训体系,训练结束后,通过严格的评判标准和考核手段对学员的资质进行审核,判断其使用机器人进行手术的能力。
1 培训组织形式
目前世界范围内绝大多数培训基地(包括我国现有的培训基地)使用的是达芬奇系统生产厂家Intuitive Surgical公司的推荐标准,其将培训分为临床前期培训(培训中心进行)和临床期培训(医院进行)。临床前期培训包括了课程学习,基础训练,模拟训练,动物实验。临床课程包括临床观察,担任一助,以及在高年资医生帮助下主刀[3]。
由于临床前期培训费用高昂,必须压缩培训时间,导致培训效果并不令人满意,2天的培训仅能保证50%的泌尿外科医生完成机器人辅助前列腺癌根治术[4]。基于在腹腔镜培训上取得的经验,我们和兄弟院校进行合作,开始对该培训模式进行改进,提出了“阶梯式”培训的概念。即将整个培训过程分为初级,中级,高级分段进行,每阶段培训都有充分的培训时长以确保培训效果[5]。该培训模式的优点在于能为不同层次和阶段的医生提供相应的培训项目,在每个阶段都保证了充足的培训时间和明确的培训标准,由低级到高级逐步过渡以保证学习效果。
2 培训标准
2013年14家国际组织开始手术机器人培训标准(FRS,Fundamentals of Robotic Surgery)的研究工作,共同提出了手术机器人的必备技能[6](见表1和表2)。周宁新等也对团队中各成员需要掌握的核心技巧进行了系统描述[7]。
与开放手术和腹腔镜手术不同的是,机器人手术时主刀和一助的位置间隔较远,沟通不便。因此在进行培训时,整个团队的沟通训练和默契的培养非常重要,我们推荐由不同资历的医生和器械护士一起组成固定团队,共同训练。
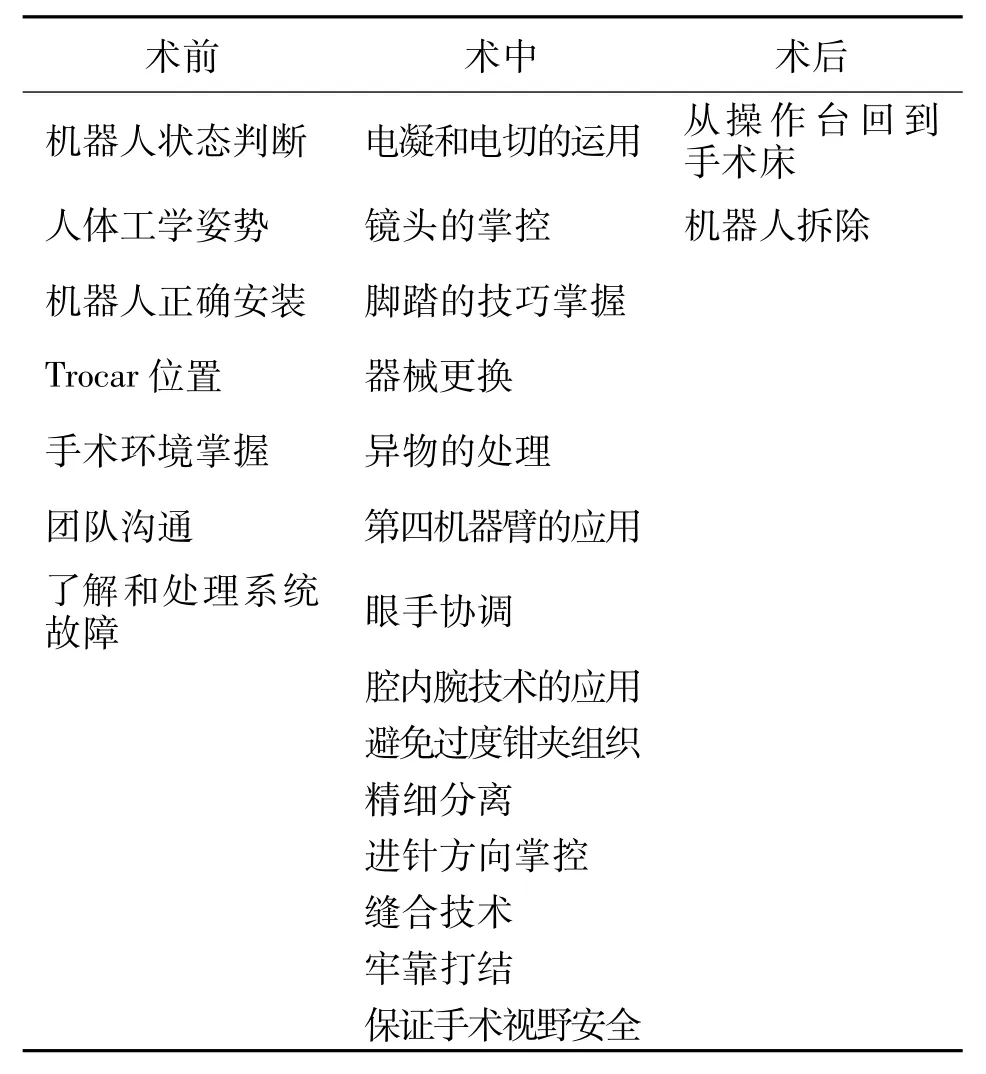
表1 机器人手术团队需要掌握的技巧
3 培训手段
3.1网上教学平台 机器人手术操作模式,操作要点等需要在理论课中予以展示,同时,手术机器人镜下解剖也需要在理论课中讲述。目前主要的网上理论课平台包括:美国Intuitive Surgica公司的网上学习平台[8]和 FRS学习平台[9],Intuitive Surgica公司的网上教程偏重于讲述机器人结构和操作特点,FRS学习平台的教程偏重于介绍机器人手术理论和解剖学知识。
3.2高仿真手术机器人模拟器 直接采用达芬奇系统进行训练,代价昂贵,所以许多厂商开发了基于虚拟现实技术的外科手术机器人模拟器用于教学。手术机器人模拟器能有效地提高机器人的的操作技巧[10],而且配备了自动评估系统对操作质量进行评估,以便学员进行针对性改进。因此,模拟器在技能训练和考核中都不可或缺。目前市面上主流的机器人模拟器为 DVSS(Da Vinci Surgical Simulator,Intuitive Surgical,Sunnyvale,CA,USA),dVT(da Vinci Trainer,Mimic Technologies Inc,Seattle,WA,USA),RoSS(Robotic Surgical Simulator,Simulated Surgical Skills,LLC,Williamsville,NY,USA)和 RobotiX-Mentor(Simbionix Inc,USA)。Mimic公司更是开发了基于dVT-XTT系统用于团队技能训练[11]。各模拟器的基本信息见表3。
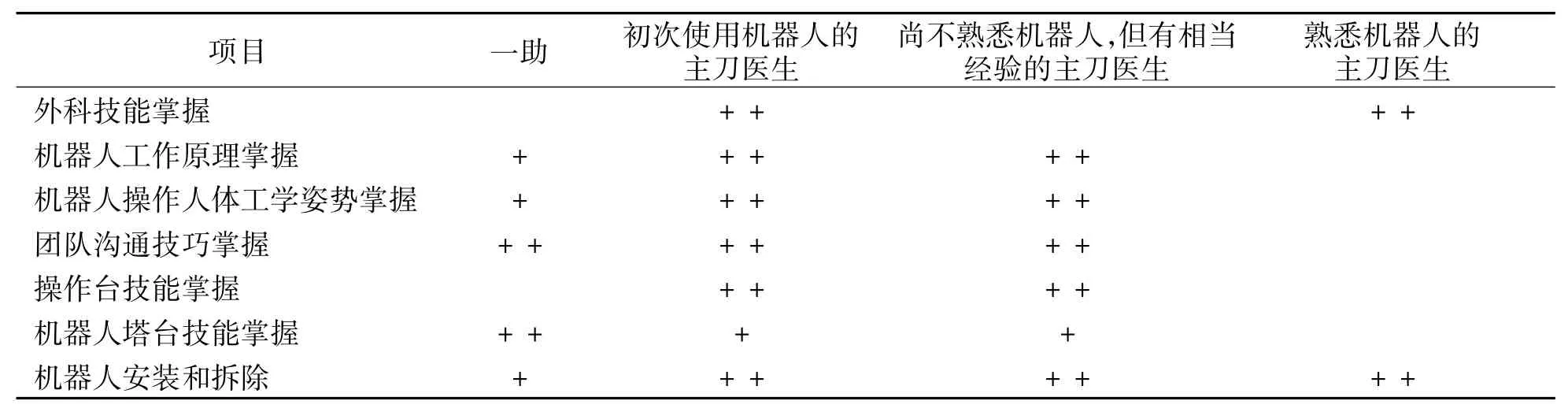
表2 各层次成员的不同要求
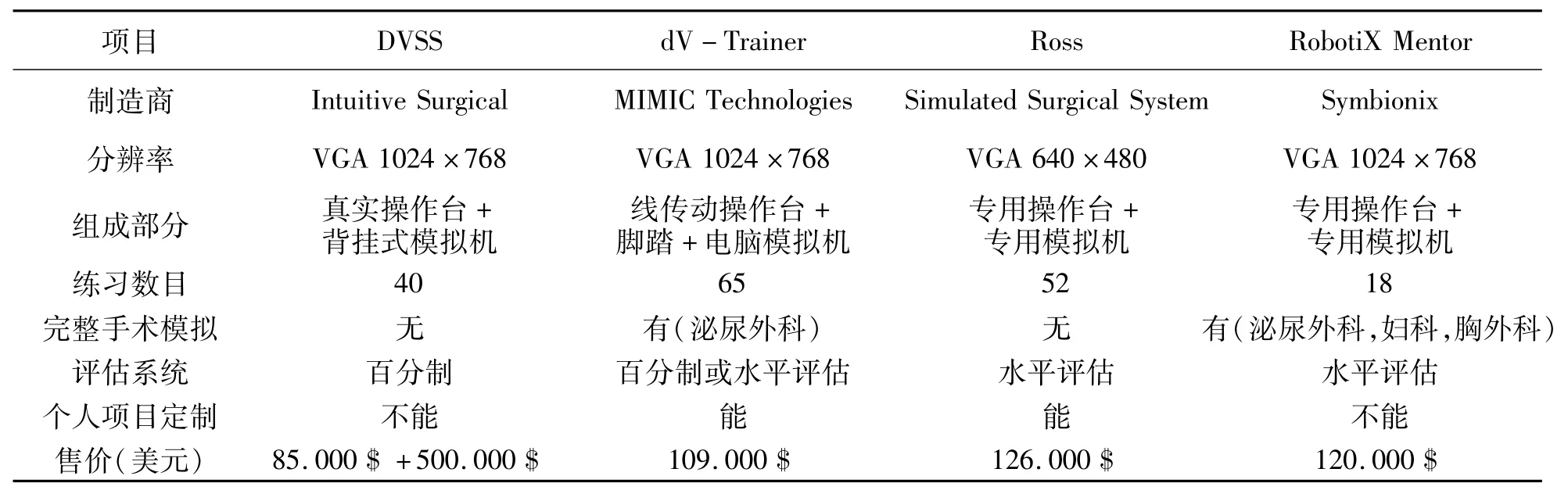
表3 主流手术机器人模拟器简介
3.3 真机训练 在模拟机上进行训练之后,需要在真机上完成训练。FRS推荐使用达芬奇机器人在一个特制的橡胶平台上完成切割,分离,缝合,打结等7种练习[9]。而来自加利福利亚大学的研究证实,真机训练中取得的经验可明显提高手术室的操作水平[12]。
3.4动物实验 Marecik等使用猪小肠缝合训练来测定术者对于缝合技巧的掌握[13],通过水密性测试,可以非常方便地判断吻合口质量。实验用猪可以很好地模拟术中的出血,以及进行器官切除手术,比较适合作为机器人的最终训练对象。
4 评估手段
dVSS和dV-trainer模拟器自带评估系统(客观),其评估项目包括项目完成时间,器械运动距离,器械碰撞次数,器械受力,器械超出视野时间,手臂运动距离,目标掉落次数和目标偏离次数。Ross的评估系统包括了项目完成时间,器械受力,器械运动距离和目标掉落次数。除此之外,通过安装在机器人托台上的压力传感器,我们发现专家对托台的利用效率远远高于新手,体现在手臂悬空次数少,时间短。因此我们提出了“托台负载”这个独立的评估参数,并通过实验证实了专家的托台负载要大于新手[14]。
在进行真机操作时,也需要对操作技巧进行评估,常用的主观评估系统有两个,一套是R-OSATS(Robotic Objective Structured Assessment of Technical Skills,机器人操作技能主观评估法)[15],另一套是GEARS(Global Evaluative Assesment of Robotic Skills,机器人技巧综合评估法),通过手术视野深度(Depth perception),双手灵巧度(Bimanual dexterity),动作效率(Efficience),器械受力(Force sensitivity),解剖知识(Anatomy),机器人掌握程度(Robotic control)六项标准对机器人手术操作技巧进行综合评估,每项满分5分,共计30分,该方法目前被认为是手术机器人技巧评估的金标准[16]。目前我们正在监测软件上集成该功能,通过滑块的方式提高精确度,方便考核和评估使用。
5 机器人手术培训发展方向
作为机器人手术技巧培训的核心系统,高仿真模拟器的发展出现了两极分化:一方面,生产厂商根据虚拟现实技术提高模拟系统的仿真度和复杂程度,从简单的操作练习过渡到完整的手术训练,从单人练习过渡到团队综合训练[11];另一方面,通过和游戏厂商合作,在体感游戏机上移植和开发机器人的初级模拟训练项目,让医学生在学习的初段就可以接触手术机器人的概念和掌握基本操作。
机器人操作台和塔台相互独立的设计方式,使之适合作为远程手术操作平台使用。与之对应的,虚拟现实技术和信息化技术相结合,让手术机器人远程培训成为可能。在充分保护患者隐私的前提下,将术者的操作信息进行整合[17],通过直播或者慕科的方式进行教学,能够充分利用教学资源,降低成本。远程化培训是未来机器人培训的趋势。
6 我们的培训经验
武汉大学医学院于2015年采购了dV-trainer模拟器,并率先将该模拟器用于学生的日常技能教学。根据阶梯式培训的理论,腹腔镜基础训练箱可以让学生掌握基本的微创操作技巧,腹腔镜模拟器可以让学生适应高仿真的模拟器,然后再通过网上FRS学习平台的理论学习,在模拟器上完成10学时的模拟训练。经过充分准备和10学时的学习,学生的机器人操作技巧有明显提升,以Thread the Rings(穿针练习)为例子,根据模拟器的自动打分系统的统计,36位学员训练后的得分为(78±8.6),和训练前的(45±9.8)相比,差异有统计学意义。经过学习,学员初步掌握了机器人的操作模式,习惯更频繁地使用脚踏以及双手配合。
7 结语
达芬奇机器人在中国装机量和手术量的增加,凸显了手术机器人系统化培训的重要性。目前,北京301医院和上海长海医院组建了基于达芬奇手术机器人系统的培训中心,天津组建了基于Mimic模拟器的机器人培训模拟中心,对手术机器人系统化和本土化培训进行了积极的探索。同时,我国哈尔滨工业大学,天津大学等单位都开展了国产机器人的研制工作,取得了突破性进展。在不久的将来,国产机器人将进入临床。
然而,机器人培训标准化的制定工作并未引起我国医学界的的足够重视,其进度远远落后于硬件建设。届时,我们将面临有国产机器人,而无国家培训标准可用的尴尬境地。因此,我们希望通过目前国际机器培训系统的经验总结和对其未来发展趋势的探讨,结合我们培训所取得的经验,抛砖引玉,引发思考,共同推动制定符合中国国情的国家手术机器人培训标准。
