人工势场法路径规划的差分进化参数优化研究
2019-12-13赵文瑜彭程
赵文瑜,彭程,2
(1.华北科技学院电子信息工程学院,三河 065201;2.应急管理部煤炭安全监测监控技术安全生产重点实验室,三河 065201)
0 引言
路径规划是移动机器人的重要研究领域,是移动机器人导航的基本环节之一,它的目的是找到一条从起始位置到目标位置的无碰撞路径[1]。近来研究人员提出了多种路径规划算法,例如Dijkstra、A*、遗传算法、模拟退火、粒子群优化和人工势场法等[2-6]。人工势场法是一种应用广泛的路径规划方法。其优点是数学表达式简洁明了、反应速度快、实时性好且物理意义明确[5]。但是人工势场法也有一定的局限性,本文研究分析传统人工势场中参数的设置对最终路径规划结果的影响,并使用差分进化算法优化人工势场法的主要参数,以期规划出距离短且平滑性更好的路径。
1 传统人工势场算法的路径规划
人工势场法的主要基本思想是假定机器人在一个虚拟的人工受力场中,目标点产生对移动机器人的吸引力,而在场内的障碍物产生对机器人的排斥力,吸引与排斥这两种力的合力作为机器人的驱动力,引导机器人从起始点向目标点运动,反映在数学模型上则是引力场与斥力场的模型建立。
在势场中,机器人距离障碍物越近排斥力越大,方向是由障碍物指向机器人,当机器人与障碍物的间距大于一定值时,障碍物对机器人的排斥力可以忽略不计。因此可取斥力势场函数:

式中Ur(q)是斥力势场函数,q表示机器人当前所在位置,Kr斥力场函数的增益系数,ρ(q)为机器人到障碍物的间距,ρ0为障碍物能够影响机器人的最大距离,即超出这个距离障碍物对机器人的排斥力可以忽略不计。因此可得到机器人在虚拟势场中受到的排斥力:
式中Fr(q)是排斥力,qo是障碍物的位置。
在势场中,移动机器人受到目标点的吸引的作用。当移动机器人间距越远时,目标点对移动机器人的吸引力越大,当机器人与目标点的间距越近时吸引力越小,当机器人与目标点的间距为零时,机器人的势能为0,这样机器人就到达了目标点。虚拟的势场中的性质类似于弹性势场,弹性势场中的势能与距离成正比,即可得到引力势场中引力势场函数:

式中Ua(q)是吸引势位,Ka为正比例系数,ρg(q)是移动机器人与目标点之间的间距。因此可以得到吸引力:

全局势场U(q)由吸引势场与排斥势场的和而得来,即:

与之相对应,合力F(q)为:

2 人工势场法参数优化
通过仿真实验发现人为设置的参数对人工势场法规划的路径有很大影响,其中引力场正比例增益系数Ka、斥力场的增益系数Kr,障碍物的影响距离ρ0这三个参数的设置不当对路径规划的影响最为明显,具体可见下一节仿真实验结果。在确定了传统人工势场的模型后,为了得到一条更平滑的路径,通过差分进化算法对 Ka、Kr、ρ0这三个参数进行优化,其优化的目标是规划得到的路径长度最短。
差分进化算法(Different Evolution,DE)是由Storn和Price在1995年提出的[7]。差分进化算法是一种启发式寻求最优解的智能算法,与遗传算法类似,该算法也包含变异、交叉、选择等过程。差分进化算法的特点是结构简单,便于理解与实现,且具有很好的鲁棒性和收敛性。差分进化算法的相关公式可参考文献[7-8],这里不再赘述。差分进化算法的流程如下:
(1)设置差分进化算法的控制参数。控制参数包括种群的大小NP,缩放因子F,交叉概率CR,最大迭代代数G;
(2)随机产生初始种群;
(3)计算种群中个体的目标函数值,找出种群中的最优个体;
(4)对种群中的每个个体重复步骤(5)~(8);
(5)变异操作,生成变异向量;
(6)边界条件处理;
(7)交叉操作,对目标向量和变异向量进行交叉操作,生成试验向量;
(8)选择,计算试验向量的目标函数值,进行贪婪选择操作;
(9)迭代代数加1,若没有达到最大代数G返回(4),否则结束输出最优个体及其对应的目标函数值。
3 仿真实验及结果分析
为了验证本文提出算法的有效性,使用MATLAB软件进行仿真实验。移动机器人在10 m×10 m的有障碍环境中运动,将障碍物膨胀为圆[9],起始点坐标和目标点坐标分别设置为(0.5,0.5)和(9.5,9.5)。在传统人工势场法规划路径时设置两组不同参数,比较不同参数设置对最终路径的影响,并用差分进化算法优化人工势场法的三个参数,得出最优路径。
3.1 人工势场法的路径规划仿真结果
人工设置的两组参数如表1所示。在第一组参数设置下规划出的路径见图1,此时移动机器人出现目标不可达的问题;在第二组参数设置下规划出的路径见图2,此种情况下路径存在明显的锯齿,其规划出的路径距离长度20.076 m。

表1 人工势场法模型的相关参数

图1 第一组参数下的路径规划仿真结果

图2 第二组参数下的路径规划仿真结果
3.2 差分进化算法优化后路径规划仿真结果
差分进化算法相关设置如下:初始种群大小设置为10,最大迭代数为30,交叉概率CR和缩放因子F分别设置为0.1和0.4。差分进化算法优化人工势场法中三个参数后的路径规划结果如图3所示,其规划出的路径不再有锯齿状,很好地提升了移动机器人路径的平滑性。优化后的人工势场参数如表2所示,路径为14.947 m,相较于前述第二组参数时得到的结果,得到了长度更短、平滑性更好的路径,同时也解决了因参数设置不当出现的目标不可达问题。
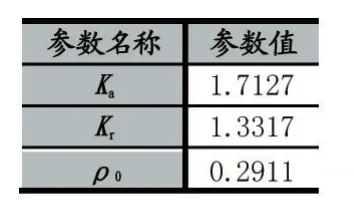
表2 优化后的人工势场法的相关参数
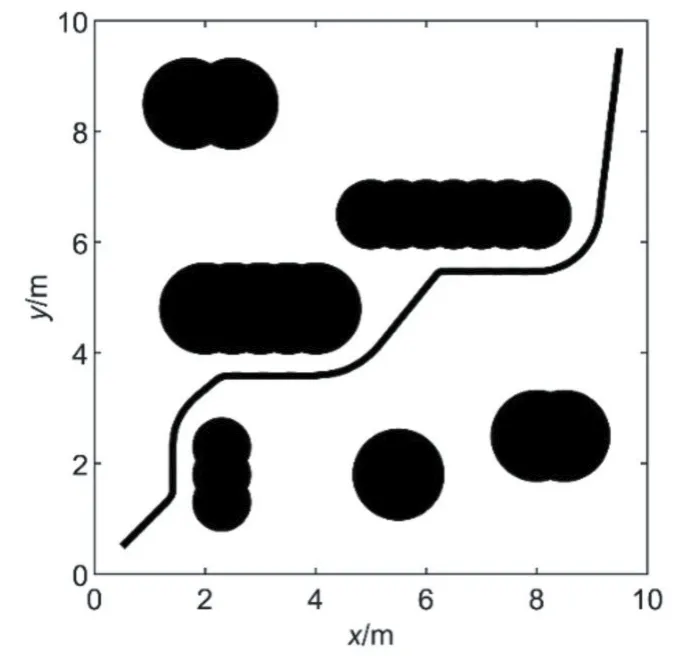
图3 差分进化算法优化后的路径规划仿真结果
4 结语
本文针对传统人工势场法存在的缺陷,将传统人工势场法与差分进化算法相结合,以减小路径长度为目标,对人工势场法的三个参数:引力场正比例增益系数、斥力场增益系数以及障碍物的影响距离进行优化,仿真结果表明参数优化可以显著改善人工势场法的性能。
