基于人铃合重心指标对高水平运动员抓举失败的运动生物力学分析
2019-11-28朱厚伟史曙生申翠梅刘功聚潘慧炬
朱厚伟,史曙生,申翠梅,刘功聚,潘慧炬*
ZHU Houwei1,2,SHI Shusheng1,SHEN Cuimei2,LIU Gongju3,PAN Huiju2*
0 前言
运动员在抓举过程中需要遵循“近”“快”“低”3项原则(王云德,1987;张跃 等,1989)。“近”是指提铃过程中要求杠铃尽量贴近身体,以杠铃重心和身体重心(“两心”)在水平方向的距离(LH)来判定。M为杠铃重量,LH为杠铃到人体质心的距离,W为杠铃对质心的阻力矩,基于W(t)=M LH(t),M不变,LH越小W也就越小,运动员也就越省力(秦硒,1998)。“快”指提铃和发力要快,以发力阶段末杠铃获得的最大速度(Vmax)来判定,即为满足运动员下蹲接铃完成的最佳距离,h过大造成能量浪费,h过小则无法完成接铃动作,此时的最大速度(Vmax)就是最恰当初速度(Vmax0)(秦硒,1998)。“低”要求运动员以最快的速度降低人体重心,便于完成接铃动作,以接铃过程中身体重心下降的最大加速度(af)判定。相关研究指出,优秀运动员的af大于重力加速度g。
最初关于抓举的运动生物力学研究主要集中于二维的小样本,自1988年起,3D运动学研究逐步开始(张跃等,1995)。随着三维技术的使用,用于“近”“快”“低”3项原则的判定指标更加多元、精准。杠铃最大高度(Hbmax)、杠铃的回落距离(Hbd)是评价支撑完成阶段的关键指标(毕志远等,2015;刘金,2017);杠铃端点轨迹、人体重心轨迹被用作运动员抓举技术特征的整体分析(艾康伟 等,2005;常鹏飞 等,2018;王向东 等,2006);时间和杠铃空间结构、膝关节角度、髋关节角度等是继抓举动作阶段划分之后对抓举的整体结构进行评价的指标(李建英等,2010;王向东等,2008);“阶段性”揭示了抓举动作技术不仅要符合力学原理,还要与人体的结构、生理特性相适应,“阶段性”是对抓举3项原则的补充。近年来,国内通过抓举的结构评价,杠铃重心及人体重心轨迹对优秀运动员技术动作特征的分析及对比较多。但是,对运动员抓举成功与失败技术动作的对比研究较少,其中Gourgoulis等(2009)和毕志远等(2015)指出,从时间结构和空间结构特征分析优秀运动员的成功与失败不存在显著性差异,仅加速度的矢量方向存在差异,这表明可能与运动员抓举过程的稳定性存在联系。并且多数优秀运动员抓举失败是发生在下蹲支撑阶段(王明暄等,2001),因此,研究推测杠铃重心与身体重心在矢状轴的相对位置超出运动员控制极限是导致杠铃前掉或后掉的原因。由于每位运动员、每次抓举杠铃的重心轨迹都会有所差异,且杠铃的重心轨迹与身体重心轨迹变化存在一定联系,所以本研究提出采用人铃合重心作为研究指标之一。本研究选取某次比赛同一级别前6名运动员的技术动作,对“近”“快”“低”3项原则指标、阶段性原则指标及人铃合重心指标参数进行深入分析,旨在剖析运动员抓举成功与失败动作特征之间的差异,探究导致抓举失败的运动生物力学因素。
1 研究对象与方法
1.1 研究对象
选取2016年全国举重锦标赛暨里约奥运会选拔赛男子69 kg级抓举比赛中前6名运动员,抓举成功和失败最大重量的技术动作特征作为研究对象,抓举失败时刻必须发生在下蹲支撑阶段之后,且均为杠铃前掉,以便于数据的对比分析。2016年全国举重锦标赛暨里约奥运会选拔赛是国内高规格比赛,为竞争里约奥运会的入场券,运动员们均展现出最好的竞技状态,其中5名运动员为国际运动健将、1名为运动健将,廖辉是69 kg级抓举世界纪录保持者、北京奥运会冠军,石智勇是男子69 kg级的里约奥运会冠军、73 kg级抓举的世界纪录保持者,样本具有较好的代表性(表1)。

表1 运动员信息表Table 1 The Basic Situation of the Study
1.2 研究方法
1.2.1 运动学分析
摄像系统:比赛过程中采用2台SONY DCRHC52E摄像机,拍摄频率为25帧·s-1,2台摄像机分别位于举重台前的左右两侧,通过举重台中心的主光轴之间的夹角约90°,定标后保持摄像机位置和拍摄条件不变。
坐标系:在比赛前将24点的Peak框架放置在比赛场地,对比赛场地的三维空间进行标定,坐标系设定为X轴正轴方向指向运动员正后方,Y轴正轴方向指向运动员身体右侧,Z轴正轴方向垂直向上。
1.2.2 数据采集与计算
动作阶段的划分:根据抓举的技术动作特征,依据7个特殊的时刻点(时相)划分为6个阶段。7个时相分别为:杠铃离地前瞬间、伸膝最大瞬间、引膝最小瞬间、杠铃速度上升至最大瞬间、杠铃上升至最高点瞬间、杠铃下降速度最大瞬间、杠铃速度为0瞬间;6个阶段:伸膝提铃阶段、引膝提铃阶段、发力阶段、惯性上升阶段、下蹲支撑阶段、接铃完成阶段(朱厚伟等,2017)。
数据采集:采用德国的SIMI Motion 7.50三维运动分析系统,解析频率为50 Hz,对杠铃离地瞬间的前4帧画面进行截取,逐帧进行手工点数字化处理。选择左右侧手、肘、肩、髋、膝、踝、脚尖、脚后跟和头等17个关节点进行解析,人体以及环节重心等环节惯性参数依据Hanavan人体力学模型(由头、上躯干、下躯干,以及左右两侧的臂、前臂、手、大腿、小腿、足等15个刚体组成)计算获得,杠铃重心以杠铃两侧端点的中心作为杠铃的重心位置。3D图像合成采用DLT计算方法获得人体三维运动的空间坐标,计算有关的运动学参数,将杠铃重心和人体重心通过SIMI运动解析软件导出原始坐标数据,并通过下列计算公式获得人铃合重心轨迹。
人铃合重心计算。1)X轴的人铃合重心Xc计算:运动员的身体重心在X轴位置(X1),杠铃重心在X轴位置(X2),运动员的体重(M1),杠铃重量(M2),公式如下:
2)Y轴的人铃合重心Yc计算:运动员的身体重心在Y轴位置(Y1),杠铃重心在Y轴位置(Y2),运动员的体重(M1),杠铃重量(M2),公式如下:

3)Z轴的人铃合重心Zc计算:运动员的身体重心在Z轴位置(Z1),杠铃重心在Z轴位置(Z2),运动员的体重(M1),杠铃重量(M2),公式如下:

为了分析运动员的成功与失败试举是否遵循“近”“快”“低”3项基本原则,本研究选取了杠铃上升阶段身体重心与杠铃重心的最小距离(LHmin)作为判定“近”原则的参数;将发力阶段末杠铃在Z轴的最大速度(Vmax)、惯性上升阶段末杠铃取得的最大高度(Hbmax)(毕志远等,2015)作为判定“快”原则的参数;发力结束后运动员身体迅速进入下蹲状态,此时身体重心的下降加速度的最大值(af)、惯性上升阶段末杠铃重心与身体重心在Z轴的垂直距离(LHz1)、下蹲支撑阶段末杠铃重心与身体重心在Z轴的垂直距离(LHz2)、下蹲支撑阶段末杠铃重心高度(Hb5)和身体重心高度(Hbd5)作为判定“低”的参数。
1.2.3 数理统计学分析
将获得的数据资料进行分类整理,数据均采用平均数±标准差(M±SD)表示,采用SPSS 20.0软件,选用配对t检验的方法对每组数据进行比较分析,显著性水平选择P<0.05,采用一元线性回归模型计算人铃合重心X轴随时间的线性变化。
2 研究结果
2.1 “近”“快”“低”原则参数对比
对“近”“快”“低”原则参数的比较见表2。两者杠铃上升阶段身体重心与杠铃重心的最小距离(LHmin)、发力阶段末时刻杠铃在Z轴的最大速度(Vmax)、两者杠铃在惯性上升阶段末时刻杠铃取得的最大高度(Hbmax)、下蹲支撑阶段末杠铃的垂直高度、身体重心的垂直高度及两者之间的垂直距离均无统计学差异。两者身体重心下降加速度的最大值(af)差异不具有统计学意义(t=0.159,P=0.88),两者af相差 0.114 6 m·s-2。但值得注意的是,前 4名运动员无论成功或失败,抓举的af均大于重力加速度g(9.8 m·s-2),后2名运动员的af小于重力加速度g;两者下蹲支撑阶段末杠铃重心与身体重心在Z轴的垂直距离(LHz1)差异具有统计学意义(t=4.188,P=0.009),抓举成功的LHz1比抓举失败大1.95 cm。
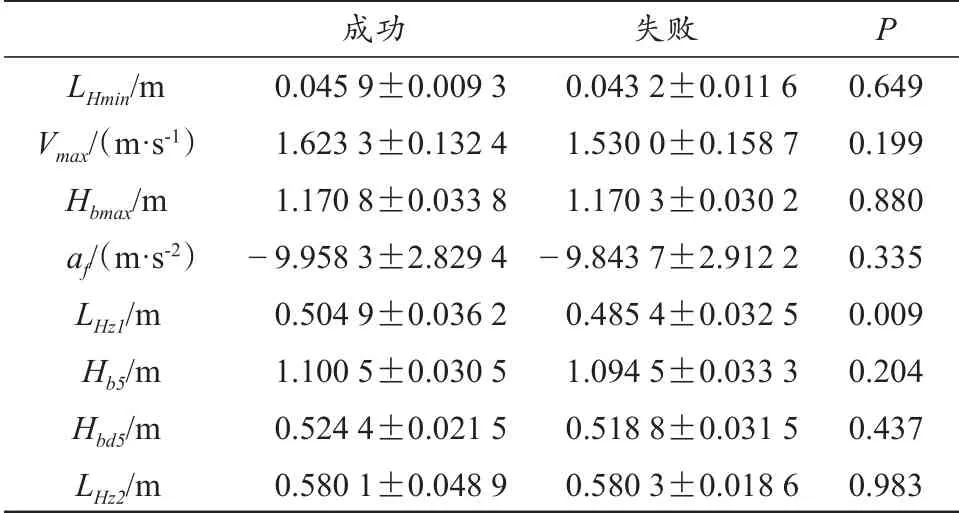
表2 男子抓举运动员动作参数的对比分析Table 2 ComparativeAnalysis of theAction Parameters of Male SnatchAthletes
2.2 阶段性参数对比
为了更细致地研究运动员的抓举动作特征,通常将运动员的抓举技术动作分为伸膝提铃阶段、引膝提铃阶段、发力阶段、惯性上升阶段、下蹲支撑阶段和接铃完成阶段。由于运动员失败试举均发生在接铃完成阶段,所以成功与失败抓举的阶段性参数对比不包括接铃完成阶段(由杠铃下降速度最大至杠铃速度为0)。将各阶段杠铃的上升高度、各阶段的所用时间、各阶段末膝关节与髋关节角度的平均值进行对比分析。
6名运动员抓举成功与失败各阶段杠铃的垂直位移及时间,与各阶段末膝关节及髋关节参数的比较如表3、表4。抓举成功与失败各阶段杠铃上升高度的平均值、各阶段时间的平均值、各阶段末膝关节角度的平均值、抓举成功与失败各阶段末髋关节角度的平均值差异均不具有统计学意义。

表3 抓举成功与失败各阶段杠铃的垂直位移与时间Table 3 Vertical Displacement and Time of the Barbell at Each Stage of the Successful and Unsuccessful Snatch

表4 抓举成功与失败各阶段末膝关节与髋关节角度Table 4 Knee and Hip JointAngles at Each Stage of Successful and Unsuccessful Snatch
2.3 人铃合重心参数对比
“合重心”源自物理学中组合物体重心的计算。人铃合重心是指将运动员与杠铃看作一个整体,人体重心与杠铃重心形成的合重心。在计算人铃合重心之前,首先将数据进行统一化处理,将所有运动员成功与失败的试举三维坐标定义为X(运动员的前后方向,向后为正轴)、Y(运动员的左右方向,向右为正轴)、Z(垂直方向,向上为正轴)轴,将抓举前杠铃重心的三维坐标均设置为(0,0,0.225),身体重心的三维坐标随之进行相应处理,使所有抓举开始时的三维坐标一致。对6名运动员抓举成功与失败的人铃合重心在X、Y、Z轴的变化进行对比(图1、图2、图3)。
抓举成功与失败的人铃合重心在X轴的变化轨迹如图1,6名运动员的人铃合重心在X轴的位移均呈现随时间增长而增加,且图中所有运动员抓举成功的曲线斜率均高于抓举失败。图2为抓举成功与失败的人铃合重心在Y轴的变化轨迹,显示各运动员在Y轴的偏移量均十分小,变化最大的石智勇小于0.05 m且没有明显的变化规律。图3为抓举成功与失败的人铃合重心在Z轴的变化轨迹,显示变化轨迹呈先上升再下降的趋势,且抓举成功与失败的轨迹呈现出高度的一致性。
为进一步验证人铃合重心对优秀抓举运动员技术动作特征的作用,对人铃合重心的X轴各时相的特征值和各阶段的变化值进行截取,对比分析抓举成功与失败技术动作的人铃合重心X轴的差异性。采用累计变化量计算方法,分析运动员抓举成功与失败之间人铃合重心Y轴、Z轴累计变化量的差异。
6名运动员抓举成功与失败各阶段人铃合重心在X轴的时相特征及阶段变化参数的比较如表5,显示在伸膝提铃末、惯性上升末、下蹲支撑末3个时相存在差异,且差异具有统计学意义(t=2.599,P<0.05;t=3.092,P<0.05;t=3.686,P<0.05),其他3个时相(伸膝提铃初、引膝提铃末、发力阶段末)的差异不具有统计学意义(t=1.832,P=0.126;t=2.223,P=0.077;t=1.478,P=0.199)。由于人铃合重心在X轴的变化呈上升趋势,所以采用杠铃阶段变化值代表每个阶段的变化量。图3显示,惯性上升、下蹲支撑2个阶段成功与失败的动作对比发现,人铃合重心X轴的变化量存在差异,且具有统计学意义(t=2.597,P<0.05;t=2.606,P<0.05),其他3个阶段(伸膝提铃、引膝提铃、发力阶段)人铃合重心X轴的变化量,成功与失败的差异均不具有统计学意义(t=0.756,P=0.484;t=1.262,P=0.263;t=-0.123,P=0.907)。

图1 抓举成功与失败的人铃合重心在X轴的变化轨迹Figure 1. The Trajectory of the Human&Bar Combination Barycenter of Successful and Unsuccessful Snatch in the X-axis
图2 抓举成功与失败的人铃合重心在Y轴的变化轨迹Figure2. TheTrajectoryoftheHuman&BarCombinationBarycenterofSuccessfulandUnsuccessfulSnatchintheY-axis
图3 抓举成功与失败的人铃合重心在Z轴的变化轨迹Figure 3. The Trajectory of the Human&Bar Combination Barycenter of Successful and Unsuccessful Snatch in the Z-axis

表5 抓举成功与失败各时相人铃合重心在X轴的位移Table 5 The Displacement of the Human&Bar Combination Center of Gravity at the Moment ofSuccessful and Unsuccessful Snatch on the X-axis
由于人铃合重心在Y、Z轴的变化呈现出上下浮动,所以采用阶段累计变化量对抓举成功与失败的动作特征进行分析。t检验结果显示,抓举成功与失败各阶段人铃合重心在Y轴的累计变化量差异不具有统计学意义(t=1.2,P=0.284;t=1.53,P=0.186;t=1.68,P=0.154;t=0.06,P=0.954;t=-0.067,P=0.949),抓举成功与失败各阶段时间的平均值差异不具有统计学意义(t=-0.364,P=0.731;t=-0.768,P=0.477;t=0.564,P=0.597;t=0.728,P=0.499;t=0.192,P=0.855)(表6)。
人铃合重心累计变化量计算:把Y、Z轴人铃合重心的累计变化量作为判定指标。设每阶段有n帧,该阶段Ycn累计变化量的计算(Zcn与Ycn的计算相同):

2.4 人铃合重心X轴回落阶段回归模型的建立
将时间作为自变量x,人铃合重心在X轴的值为因变量y,建立抓举成功与失败惯性上升开始至下蹲支撑阶段结束的一元线性回归模型。该阶段人铃合重心在X轴的值y随时间x变化的线性回归模型如表7、表8。各线性回归模型的拟合程度由R2值表示,所有回归模型的R2值均大于0.85,说明该数据的拟合程度和线性程度较好(表7)。将时间设为自变量x,人铃合重心在X轴的值设为因变量y,计算每个运动员成功与失败的一元线性回归模型(表8),且所有回归模型自变量的t检验均小于0.001,表中显示一元线性回归模型成功与失败之间各运动员的样本回归系数(回归直线的斜率),成功均大于失败。
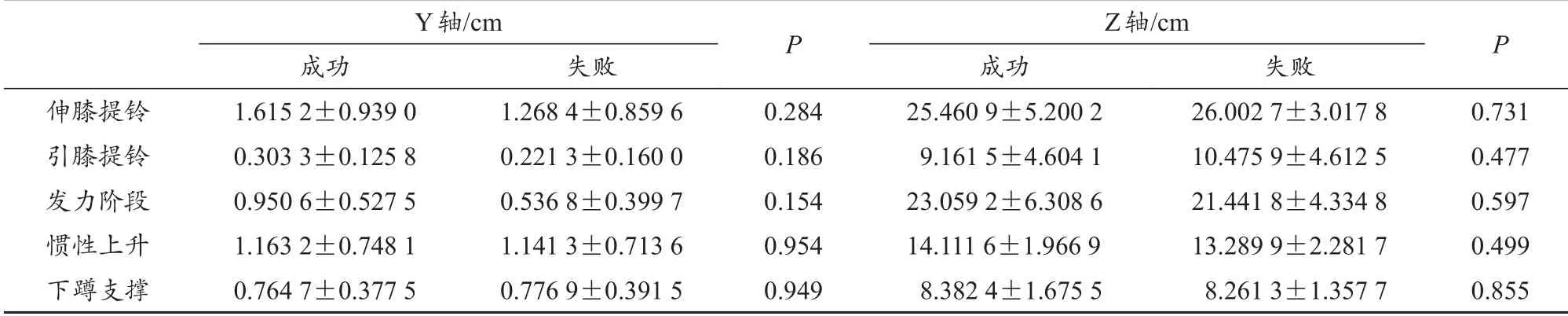
表6 抓举成功与失败各阶段人铃合重心在Y、Z轴的累计变化量比较Table 6 The Comparison of Cumulative Change of the Human&Bar Combination Barycenter of Successful and Unsuccessful Snatch between the Y-axis and Z-axis
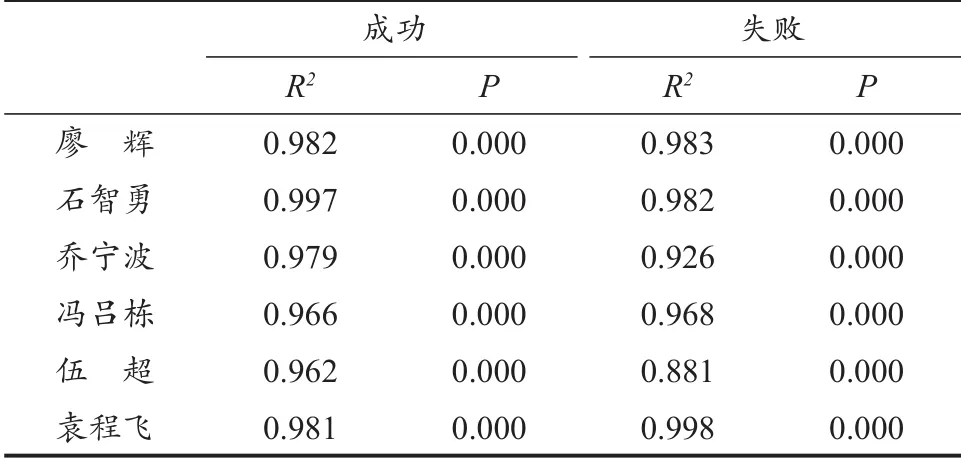
表7 人铃合重心X轴变化趋势的线性回归模型的R2值Table 7 R2Value of Linear Regression Equation Model in X-axisVariation Trend of the Human&Bar Combination Barycenter

表8 人铃合重心X轴变化趋势的一元线性回归模型Table 8 Linear Regression Equation Model of X-axis Variation Trend of the Human&Bar Combination Barycenter
3 分析与讨论
3.1 原则参数及阶段性指标结果分析
抓举动作可分为2个部分:第1部分为抓举开始至杠铃获得最大速度;第2部分为杠铃惯性上升至运动员下蹲接铃。第1部分可分为伸膝提铃阶段、引膝提铃阶段和发力阶段,这1部分主要是运动员通过提拉杠铃,给杠铃一个向上的力,使杠铃获得一定的速度和高度,以便于在发力阶段末获得最恰当初速度(Vmax0)。第2部分可分为惯性上升阶段、下蹲支撑阶段和接铃完成阶段,主要是杠铃通过第1部分获得的速度使杠铃继续惯性上升,同时依靠“甩臂翻腕”(吴谦,1981)使杠铃在上升过程中继续获得一定的速度。与此同时,杠铃的反作用力作用于人体,使运动员身体重心获得更大的向下的加速度,快速下蹲完成支撑接铃动作,且随着杠铃重量的增加,“甩臂翻腕”的动作速度也随之增加(陆爱云等,2001;单信海等,1999)。
本研究把6名运动员成功与失败的试举动作特征进行对比,两者在第1部分中杠铃重心与身体重心的两心最小距离、杠铃上升阶段的最大速度、时间指标、空间指标、关节角度均不存在统计学差异,说明优秀运动员在第1部分抓举动作中成功与失败之间的各项指标不存在明显的差异,与相关研究一致(Gourgoulis et al.,2009;毕志远等,2015)。虽然所有的指标均没有统计学差异,但如果其否定原假设的概率在70%以上,且对技术动作有着非常重要的意义(刘学贞等,2002),那么这些指标仍值得我们注意。其中,成功试举的引膝提铃末膝关节角度的平均值比失败小7.16°,有74.2%概率否定两者相等;成功试举的发力阶段末杠铃获得的最大速度比失败大0.093 3 m·s-1,有80.1%的概率否定两者相等。膝关节回屈不足会影响二次发力,势必会影响杠铃获得最大速度,可能是造成抓举失败的潜在因素。多项研究(董晋,2010;胡贤豪,1989;刘平 等,2005;王向东 等,2008;朱厚伟等,2017)指出,引膝提铃阶段膝关节回屈不足是导致抓举失败的重要因素之一,引膝阶段运动员需充分引膝和积极伸髋;反之,就是引膝不充分,髋关节伸展幅度受到限制,但在本研究中由于研究限制并不能证实抓举失败的直接原因是引膝不足。
王明暄等(2001)研究表明,“两心”最大垂直距离不够,其垂直空间不足以形成良好的支撑姿态可能是导致抓举失败的主要原因;Gourgoulis等(2009)和毕志远等(2015)的研究则指出,成功试举与失败试举动作的时空特征不具有显著性差异。本研究中,把6名运动员成功与失败的试举进行对比,两者除在第2部分惯性上升阶段末“两心”的垂直距离存在统计学差异外,两者身体重心的垂直加速度、时间指标、空间指标和关节角度均不存在统计学差异。由于两者惯性上升阶段末杠铃的最大高度之间不存在明显的差异,两者平均值仅差0.05 cm;而“两心”的垂直距离存在差异,成功抓举的LHz1比失败大1.95 cm。说明在惯性上升阶段成功试举的身体重心的下降速度高于失败试举,同时在下蹲支撑末试举成功的膝关节及髋关节角度平均值均小于试举失败。但是,在下蹲支撑阶段末,杠铃的高度、身体重心高度及“两心”之间的垂直距离均不具有统计学意义。基于此,相关研究中(王明暄等,2001)指出的支撑空间不够可能是导致失败的原因之一,还缺少足够的证明条件。
3.2 人铃合重心指标结果分析
人铃合重心是人体重心和杠铃重心组合形成的重心,人铃合重心的变化受到杠铃重心变化与身体重心变化的影响。人铃合重心在Y轴的变化表示抓举过程中杠铃重心和身体重心的左右偏移,Y轴各阶段的累计变化量越小,说明该阶段“两心”的偏移量越小,抓举过程更加稳定。研究结果显示,成功与失败抓举的人铃合重心Y轴数据存在差异,抓举成功大于失败但不存在统计学意义(图2)。人铃合重心在Z轴的累计变化量也不存在显著性差异,而且图3显示,抓举成功与失败的人铃合重心的Z轴变化量趋于一致。
对比抓举成功与失败的人铃合重心在X轴的参数变化发现,伸膝提铃末、惯性上升末、下蹲支撑末的参数,及惯性上升阶段、下蹲支撑阶段的变化均具有统计学差异,且均为抓举成功大于抓举失败。人铃合重心的X轴参数在引膝提铃末抓举成功比失败大0.732 cm,惯性上升末抓举成功比失败大2.59 cm,下蹲支撑末抓举成功比失败大3.07 cm,惯性上升阶段抓举成功的人铃合重心在X轴的变化量比失败大1.49 cm,下蹲支撑阶段抓举成功的人铃合重心在X轴的变化量比失败大0.471 cm。说明抓举成功与失败的关键问题是,惯性上升阶段及下蹲支撑阶段人铃合重心在X轴的增长幅度不足引起的。同时,本研究通过建立6名运动员抓举成功与失败的惯性上升初至下蹲支撑末的一元线性回归模型,不难看出抓举成功的回归直线斜率明显大于失败(表8)。图5显示了杠铃重心、身体重心及人铃合重心的X轴参数在整个抓举过程中的变化,发现随着时间的推移,抓举成功与失败的人铃合重心的差距越来越大,尤其是在标记点(惯性上升初)以后,抓举成功的人铃合重心的斜率明显高于失败。杠铃重心在此阶段的轨迹呈先下降后上升的变化趋势,而身体重心轨迹则呈先上升后下降的相反趋势,如要保持人铃合重心的继续增长,需减少杠铃重心的下降趋势,增加身体重心的增长趋势。

图4 某运动员抓举成功与失败的杠铃重心、身体重心及人铃合重心在X轴的变化轨迹Figure 4. The Track of the Barbell Barycenter,Body Barycenter and Human&Bar Combination Barycenter of an Athlete's Successful and Unsuccessful Snatch on the X-axis
从技术动作角度出发,发力阶段结束后杠铃获得最大垂直速度,此时身体重心快速下降,以肘关节为圆心,以小臂为半径甩动杠铃继续上升。相关研究(吴谦,1981)指出,由于杠铃从最大速度时相至最大高度时相为一个弧线运动,整个过程所受到的力可分解为垂直向上的力F1和X轴正方向的力F2。F1使杠铃上升到最大高度,F2使杠铃靠近身体,到达支撑位置,F2过大会导致杠铃重心后移而引起杠铃后掉,过小则导致重心前移造成杠铃前掉。F1的力量主要来自于“甩臂翻腕”动作,而F2的力则是来自于发力结束时,上体会有适度的后仰,用肩、腰、背部的肌群给予杠铃适当的力。身体重心在此阶段依靠杠铃的反作用力,以及积极的屈髋、屈膝进行主动下降。值得注意的是,有研究指出优秀运动员身体重心的下降速度应大于重力加速度,本研究前4名运动员身体重心的最大加速度均大于重力加速度,说明后2名运动员下蹲支撑的技术动作仍需加强。本研究认为,导致抓举失败的直接原因是人铃合重心在惯性上升阶段和下蹲支撑阶段X轴的位移不足以到达合适的接铃位置,究其原因是发力阶段末后仰力量不足引起的。而Gourgoulis等(2009)的研究认为,抓举过程中伸膝提铃阶段合加速度矢量方向的差异及运动员作用力方向的不稳定是导致抓举失败的主要原因。与本研究结果存在差异的主要原因可能是:1)相关研究中选用了多个级别(69、77和85 kg)的运动员,运动员的个体差异较大;2)研究中未区分抓举失败的类型(杠铃前掉或后掉),杠铃前掉或后掉的数据混合在一起,可能会导致失败试举数据的平均值与成功试举不存在差异。
综上,对运动员抓举成功与失败(前掉)动作特征进行对比分析得出,直接导致运动员试举失败的原因是接铃完成时期,人铃合重心在X轴的位置相比较于成功接铃位置更加靠前,导致杠铃前掉。究其原因,发力阶段末上体没有适度的后仰,用肩、腰、背部的肌肉群给予杠铃适当的力,从而导致惯性上升阶段及下蹲支撑阶段人铃合重心在X轴的增长速度不足,未能在接铃完成阶段使杠铃重心达到恰当的接铃位置,导致抓举失败。膝关节回屈不足导致二次发力不充分,进而引起杠铃最大速度低于抓举成功,可能是引起抓举失败的间接因素;最大速度不足可能导致运动员在惯性上升阶段将更多的力量用于杠铃上升,而减少了X轴正方向的力,从而间接导致抓举失败;并且惯性上升阶段末“两心”之间的垂直距离差异可能与上述因素存在关联。因此,本研究中,人铃合重心在判定优秀运动员抓举成功与失败的有效性得到验证。
4 结论
1)导致抓举失败的直接原因是,人铃合重心在惯性上升阶段和下蹲支撑阶段在X轴(前后放向,矢状轴)的位移不足以到达接铃位置,究其原因是,发力阶段末后仰的力量不足引起的,提示抓举经常前掉的运动员需加强后仰动作的练习。
2)引膝提铃阶段膝关节回屈不足,进而导致杠铃最大速度偏低,惯性上升阶段末“两心”垂直距离差异可能是导致抓举失败的间接因素。
3)人铃合重心X轴(前后方向,矢状轴)的变化量能够有效判定优秀运动员抓举成功与失败的技术动作特征。