一种优化的永磁同步电机电流迭代控制算法
2019-11-25覃思雨黄守道朱伟进
覃思雨,刘 平,黄守道,朱伟进
(1.湖南大学 电气与信息工程学院,长沙 410082; 2.湖南沃森电气科技有限公司,湘潭 411101)
0 引 言
电机的模型和参数在运行过程中的变化和不确定性将影响到矢量控制的精度,应用现代控制理论能够在电机模型或参数变化时仍可保持良好的控制性能[1-2]。目前的控制策略有PI调节器、滑模变结构控制、滞环控制和模型预测控制等[3-6]。
为改进永磁同步电机(以下简称PMSM)的电流预测控制效果,国内外学者提出了多种策略。文献[7]将电流预测模型与数学差值相结合,提出一种基于控制器的多步模型预测算法,但是由于温度、磁场的饱和程度变化,PMSM的交、直轴电感会随之变化,故系统控制精度降低。文献[8]对电流实行闭环控制,利用两个预测控制相邻周期的模型相减来消除恒定项。与传统预测控制相比,该方案仅使用一个电机参数,但实际中实现对电流指令快速跟踪时响应速度较慢,随之还有转矩波动。文献[9]提出了一种新型高频电流扩展控制器,通过该控制器将测试电流叠加到基本电流中。可并非所有的参数都可通过控制器识别,且因测试参数过大导致非常耗时。文献[10]对PMSM的模型预测控制采用两个线性模型预测控制器级联的方法。由于在建模过程中忽略了模型的非线性部分,模型预测算法虽然简单、易于实现,却不能完全反映出控制对象的动态特性,难以实现控制的准确性和精确性。
从电流预测控制的高效性和精准性出发,提出了一种优化的PMSM电流迭代控制算法,在满足电机转矩和转速前提下寻得最优的电流。采用牛顿迭代法求取最大转矩电流比控制要求下不同转矩对应的d,q轴电流最优解,对得到的最优解进行数值分析,得到相应的曲线,然后对所得曲线用数学函数进行拟合,拟合后所得函数关系式替代传统的查表法中大量的离散数据,从而简化控制,消除了对于电机参数的依赖,该方法对于任何给定的电磁转矩都可以较快地计算出其对应的电流分量。并且,模型预测控制的预测状态可降低输出延时对解耦所造成的影响,结合历史数据进行反馈校正,保证电流的跟踪性能[11-13]。定子电流最优预测控制策略从本质上讲,就是在满足电机运行需求下实现对电流最优的预测和控制。
1 PMSM建模与最大转矩电流比控制
1.1 PMSM数学模型与电压电流约束
在d,q坐标系下,PMSM的电压、电流方程:
(1)
且有:
(2)
式中:|U|,|I|为定子电压和电流单相幅值;ud,uq为定子d轴电压和q轴电压;id,iq为定子d轴电流和q轴电流;Ld,Lq为定子d轴电感和q轴电感;ωe为电角速度;Rs为定子电阻;ψ为转子磁链。
PMSM的转矩方程:
(3)
式中:Te为电磁转矩;p为极对数。
结合PMSM的电压方程和转矩方程可得到:
(4)
(5)
式(4)和式(5)表明,等电压线在某一固定转速下为椭圆,等转矩线为双曲线。当给定Te,n和|U|后,id,iq也随即由椭圆与双曲线的交点所确定。给定n和|U|两个变量才能唯一确定一个椭圆,只给定Te或n时,id和iq有无穷多的组合。在此条件下,选取能使损耗最小的一组id,iq。
曲线上的点代表着相同转矩下的最小的定子电流,也就意味着有着最小损耗[14-17]。d轴和q轴电流的表达式如下:
(6)
PMSM运行时电压和电流都不能超过限制值,即需满足下列约束条件:
(7)
即:
(8)
1.2 最大转矩电流比控制(以下简称MTPA)
MTPA可最大限度地减少铜耗。在转矩确定的情况下,遵循最优d,q轴电流分量电流轨迹使定子电流最小[18],是一种典型的恒转矩区域的电流优化控制策略。利用数学中的拉格朗日定理,引入辅助函数:
(9)
接着开始拉格朗日求极值的过程:
(10)
对上式求解,得到直轴电流id和交轴电流iq的关系:
(11)
代入得到转矩和电流的关系:
当PMSM运行时,可控损耗主要为定子铜耗pCu,其表达式如下:
(13)
定子铜耗pCu随着定子电流|I|的减小而减小,当|I|最小时,可获得最高的效率。MTPA曲线上的点代表着同样转矩下的最小定子电流,也就意味着有着最小损耗。
2 基于模型预测控制(以下简称MPC)的PMSM定子电流迭代控制算法
2.1 优化的PMSM电流迭代控制算法
本文控制策略目的在于满足电机运行状态下求取最优的定子电流,因此应根据以下规则选取约束下的最优目标工作点:
1) 在满足约束条件的前提下使实际转矩尽量接近目的转矩,选取电流集合{id,iq}=argmin|TeSP-Te|,且满足约束条件即式(7)。
2) 在集合{id,iq}中选取使id最接近idSP的组合。根据MTPA曲线求取d轴目标电流idSP和q轴目标电流iqSP,然后用约束条件进行约束重塑。MTPA轨迹上的d轴,q轴电流是目标转矩TeSP的单值函数,即:
(14)
(15)
根据式(11),得到如下d轴目标电流idSP迭代方程:
(16)
控制器每次控制循环都将根据式(16)修正当前d轴电流id0,因此单次迭代就可以得到较高的精度。
约束下的最优解:当得到d轴目标电流idSP后,应根据以下步骤选取电流最优解,此时分为下列几种情况:
1) 电压极限椭圆与电流极限圆无交点
电压极限椭圆与id轴右侧交点为(idq0,0),当idq0<-|I|lim时,电压极限椭圆与电流极限圆无交点,此时以(idq0,0)作为最终的目标工作点。但是这种情况下定子电流已经超过了限制值,长时间运行将会损坏电机,因此应尽量避免这种情况的出现。
2) 电压极限椭圆与电流极限圆有交点,转矩曲线与电流极限圆无交点
电压极限椭圆与id轴的右交点为(idq0,0),当idq0>-|I|lim时,电压极限椭圆与电流极限圆存在重叠区域。电流极限圆内的最大转矩点为MTPA曲线与电流极限圆的交点(idTm,iqTm),对应转矩为Temax,若|TeSP|>Temax,则转矩曲线与电流极限圆无交点。

3) 电压极限椭圆与电流极限圆有交点,转矩曲线与电流极限圆有交点
当idq0>-|I|lim时,电压极限椭圆与电流极限圆存在重叠区域。当|TeSP|>Temax时,转矩曲线与电流极限圆有交点。

(a) (idTm,iqTm)在电压 极限椭圆内
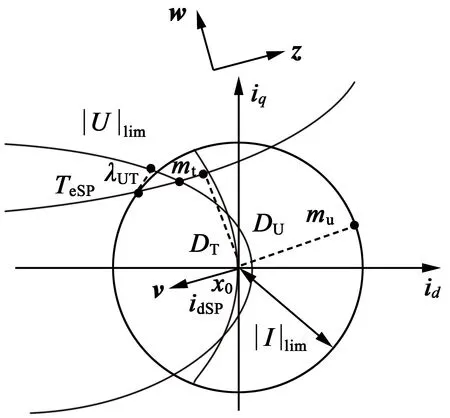
(b) (idSP,iqSP)不在电压 极限椭圆内图1 约束条件下的最优解策略


图2 优化的电流迭代算法
2.2 模型预测控制器
三相两电平电压源逆变器[19-20]的输出电压VxN由开关信号Sa,Sb,Sc决定,Sx∈{0,1},x∈{a,b,c}。逆变器的输出电压VxN=SxVdc。由此可得电机中性点到每相电压:
(17)
由ABC坐标系等幅值变换到dq坐标系,得:
(18)
式中:θ为转子位置角。需要计算8次,开关状态:(000),(100),(110),(010),(011),(001),(101),(111)。
1) 离散时间模型:对采样时间Ts的定子电流导数采用后项欧拉近似法,得d,q参考坐标系下的k+1时刻预测定子电流表达式:
(19)
2) 代价函数:为了使每次迭代的定子电流值误差最小,定义代价函数:
(20)
如图3所示,对于给定的输出转矩和转速,可以有多个不同的id,iq组合。电机运行状态下,通过最优解策略求取最优的定子电流,同时与设计的模型预测控制器相结合,对PMSM定子电流进行控制,从而形成一种优化的PMSM电流迭代控制算法。
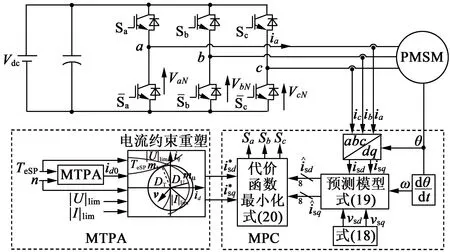
图3 优化的PMSM电流迭代控制算法
3 仿真与实验
本文对所提出的优化的PMSM电流迭代控制算法进行了仿真和实验验证。仿真和实验电路参数如下:d轴电感Ld=10 mH,q轴电感Lq=19 mH,极对数p=2,转动惯量J=0.054 3 kg·m2,永磁体磁链ψ=0.788 5 Wb,定子电阻Rs=0.349 Ω,逆变器直流电压Udc=300 V,频率f=10 kHz。
3.1 仿真
比较MTPA和本文电流优化迭代控制算法两种不同的控制方式下,通过强制增加电机转速,如图4所示,从而得到电机相应转矩以及输出d,q电流。电机输出实际电流,实际电压所对应的变化,如图5和图6所示。在电流迭代控制算法下,改变给定电压限制值大小或改变给定转矩的大小,其定子电流最优解策略如图7所示。
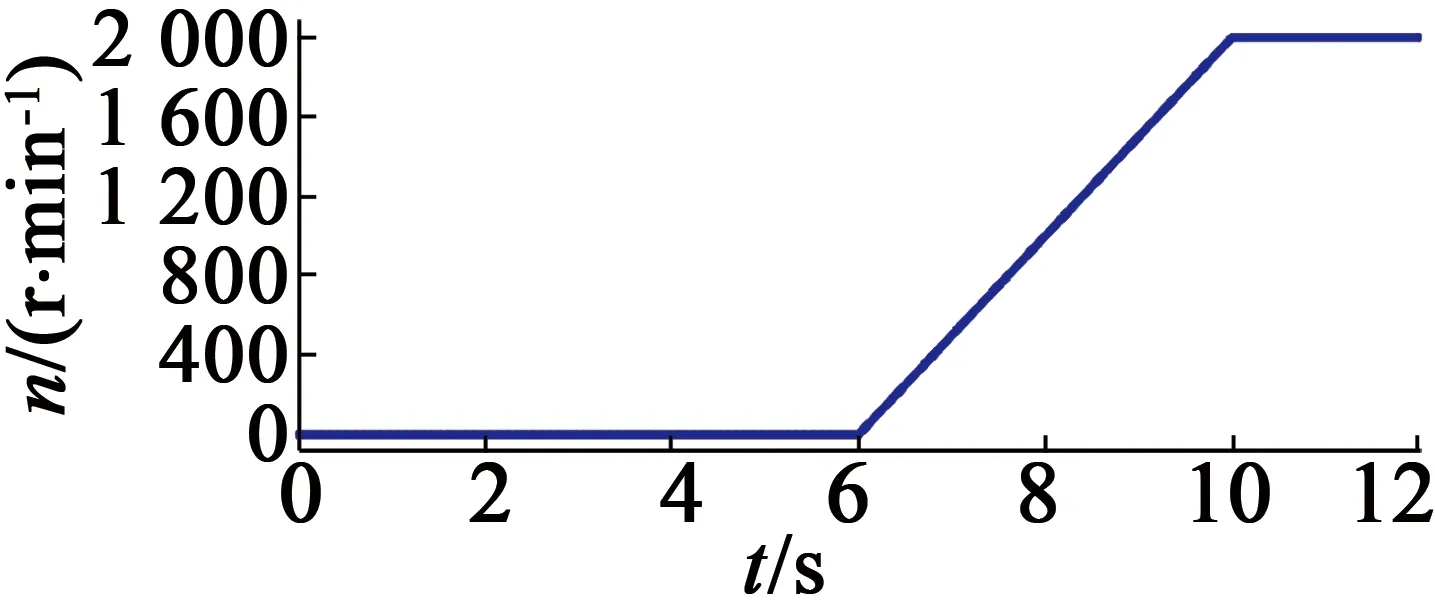
图4 电机转速
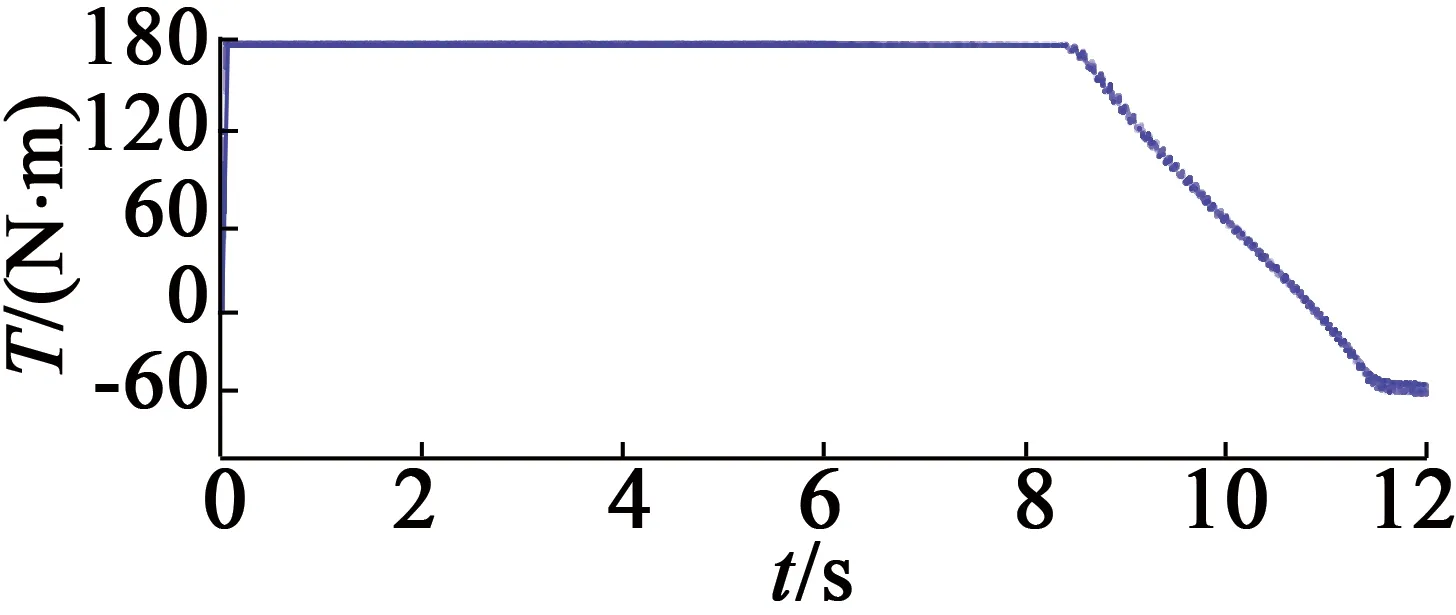
(a) 电机转矩
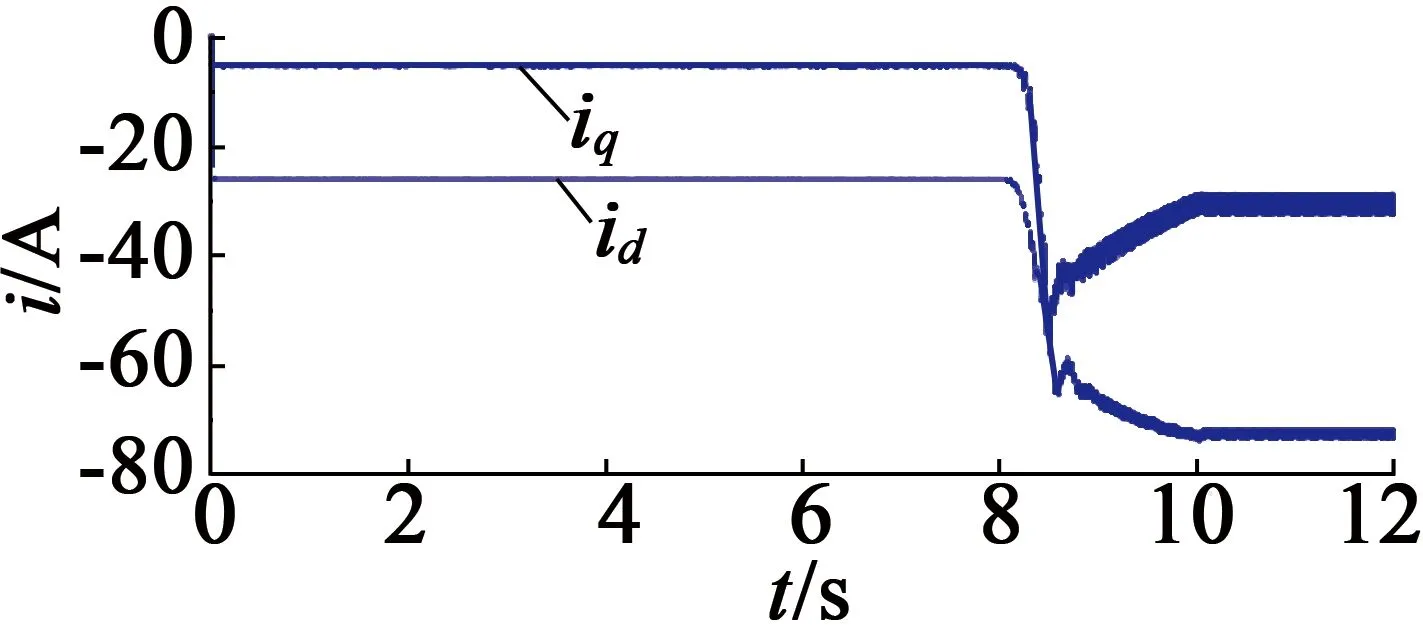
(b) id,iq
(c) 电机实际输出电流

(d) 电机实际输出电压图5 采用MTPA电流优化的MPC控制结果
(a) 电机转矩

(b) id,iq
(c) 电机实际输出电流
(d) 电机实际输出电压图6 采用电流优化迭代算法的MPC控制结果
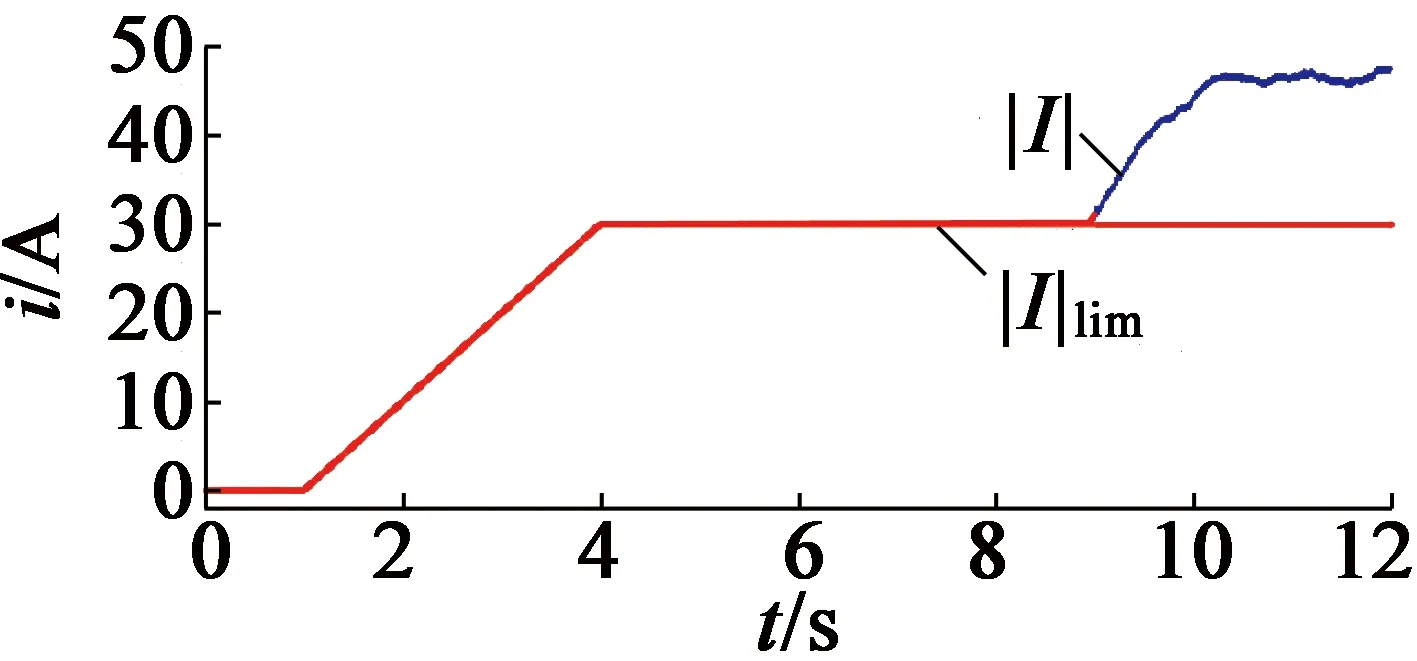
在转速从0升高到2 000 r/min的过程中,采用电流优化迭代算法时,电流iq从0逐渐增加到30 A。由于此时电流无法传递所请求的转矩极限,所以可达到的最大转矩是75 N·m。随后,转速以恒定的加速度到达2 000 r/min,随着转速进一步增加,需要更多的磁通削弱来限制电机电压,这意味着损失输出转矩。由于在电压极限椭圆方程中忽略定子电阻大小,实际椭圆中心点纵坐标为负,故最终可传递转矩最大值变为负值。由于电压下降,电压极限椭圆之间的切点以及电流极限圆之间的交点,在给定电压电流极限下,所以最终id,iq电流值为负。
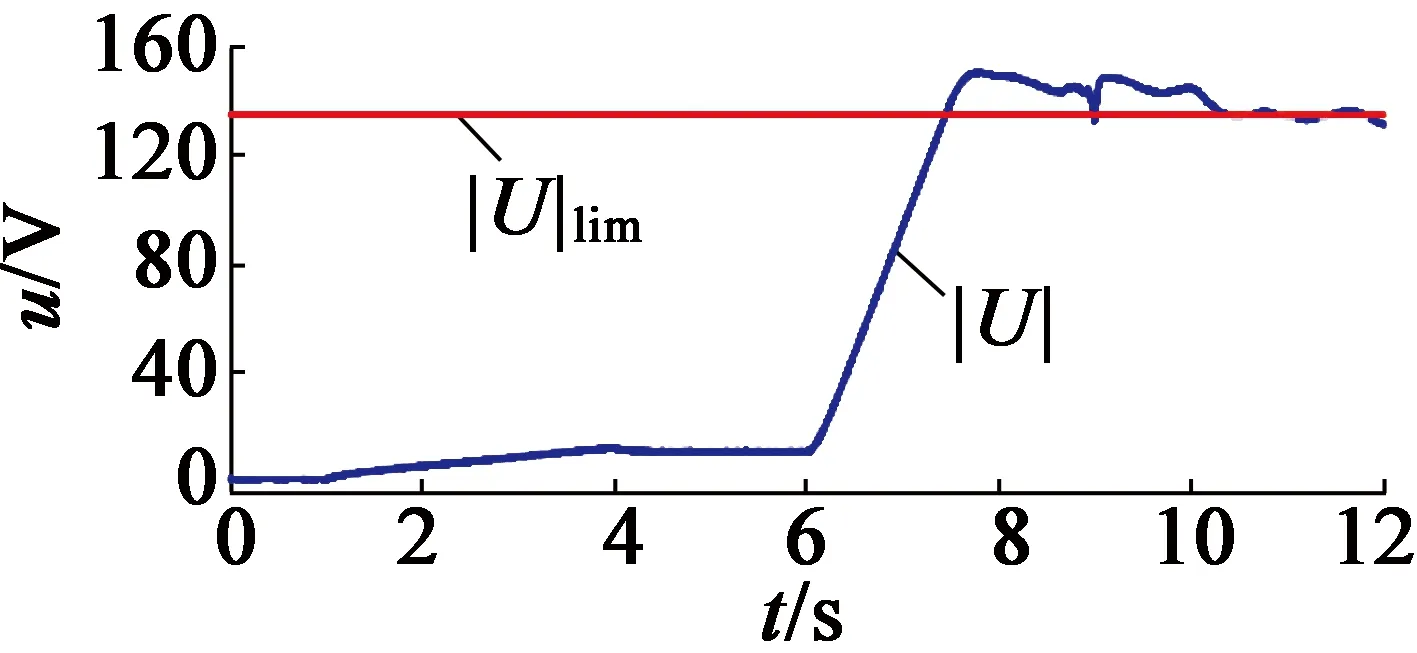
比较图5、图6,在MTPA控制下,在随转速升高的过程中转矩值最终稳定在-60 N·m,而id,iq随转速升高的过程中,id值最终稳定在-72 A,iq值最终稳定在-32 A。在电流优化迭代控制算法下,转矩在随转速升高的过程中,因为有电压电流的限制,其值最终在0上下波动。而id,iq随转速升高的过程中,id值最终稳定在-47 A,iq值最终在0上下波动。本文电流优化迭代控制算法下id,iq的绝对值均比MTPA控制下的id,iq的绝对值小,其电机损耗相对更小,控制方式更为优化。在MTPA控制下,由于没有电压电流的限制,电流在随转速升高的过程中,其值最终稳定在80 A,电压值最终稳定在183 V。在电流优化迭代控制算法下,电压限制的优先级最高,电流其次,首先满足电压限制在135 V左右,仅为MTPA控制下的电压大小的73.77%。其次限制电流,虽然电流限制值为30 A,最终也将其限制在47 A,仅为MTPA控制下的电流大小的58.75%。

(a) 转矩100 N·m, 电压限制为135 V下的 电流求解策略图
(b) 给定转矩100 N·m, 电压限制为135 V下的 最优id,iq轨迹图
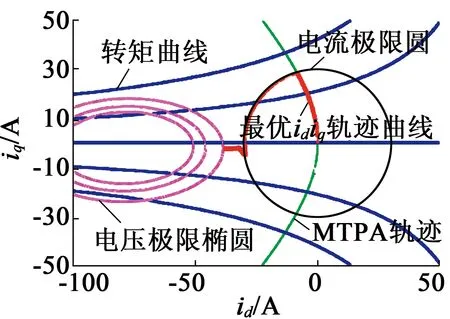
(c) 转矩100 N·m, 电压限制为192 V下的 电流求解策略图
(d) 给定转矩100 N·m, 电压限制为192 V下的 最优id,iq轨迹图
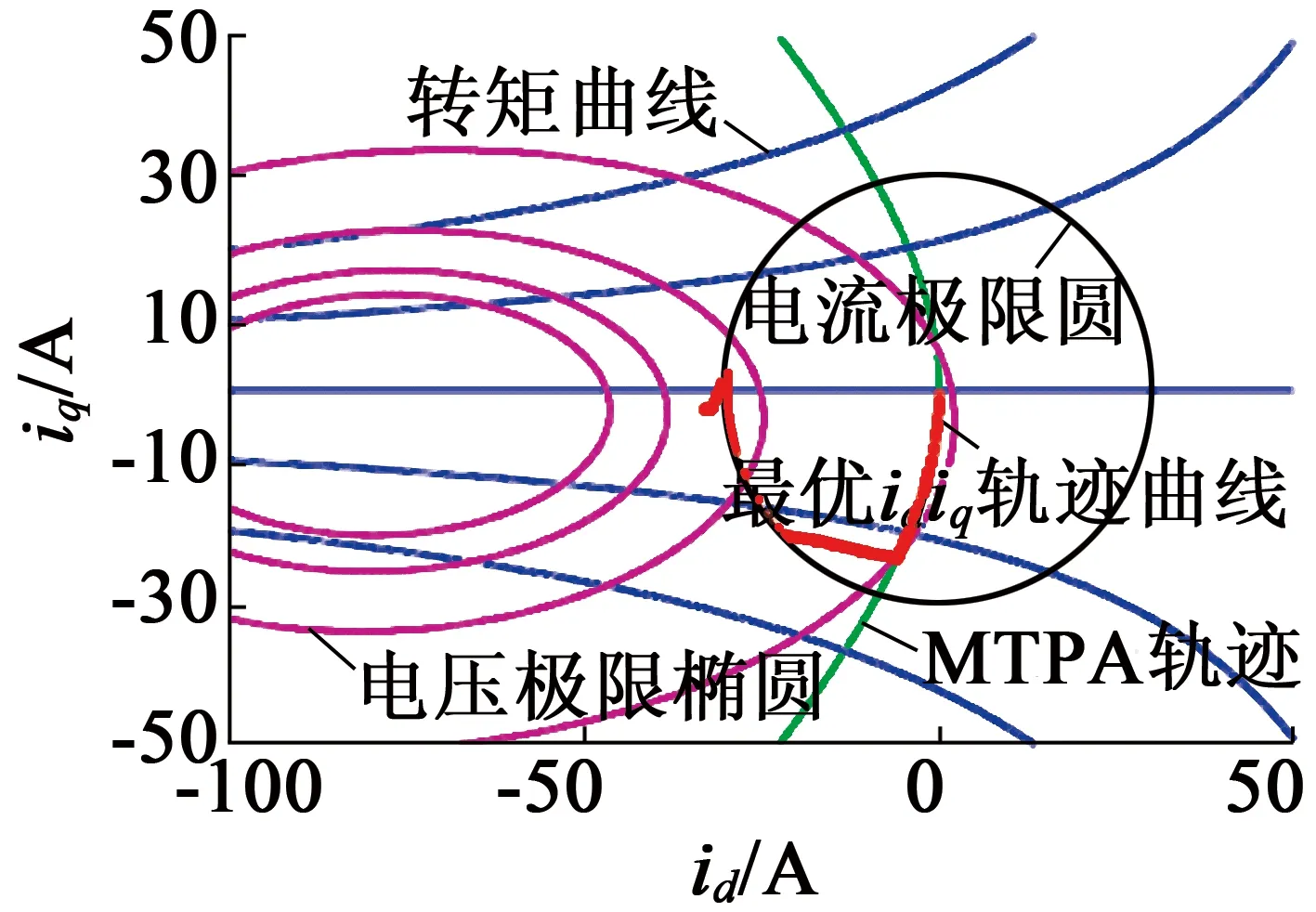
(e) 转矩-60 N·m, 电压限制为135 V下的 电流求解策略图
(f) 给定转矩-60 N·m, 电压限制为135 V下的 最优id,iq轨迹图图7 采用电流优化迭代控制算法的定子电流最优解策略
仅改变电压限制值大小,从135V增加到192 V,电压极限椭圆变大且向左移动。而仅改变给定的转矩大小,可得转矩给定100 N·m时,其最优id值均为负,iq值大部分在0到30 A内波动。转矩给定-60 N·m时,其最优id值均为负,iq值大部分在0到-25 A内波动。
经过本文电流优化迭代控制算法得到最优定子电流后,分别在传统的磁场定向控制(以下简称FOC)-PI控制和本文的MPC控制下,比较id,iq控制的优劣,如图8和图9所示。
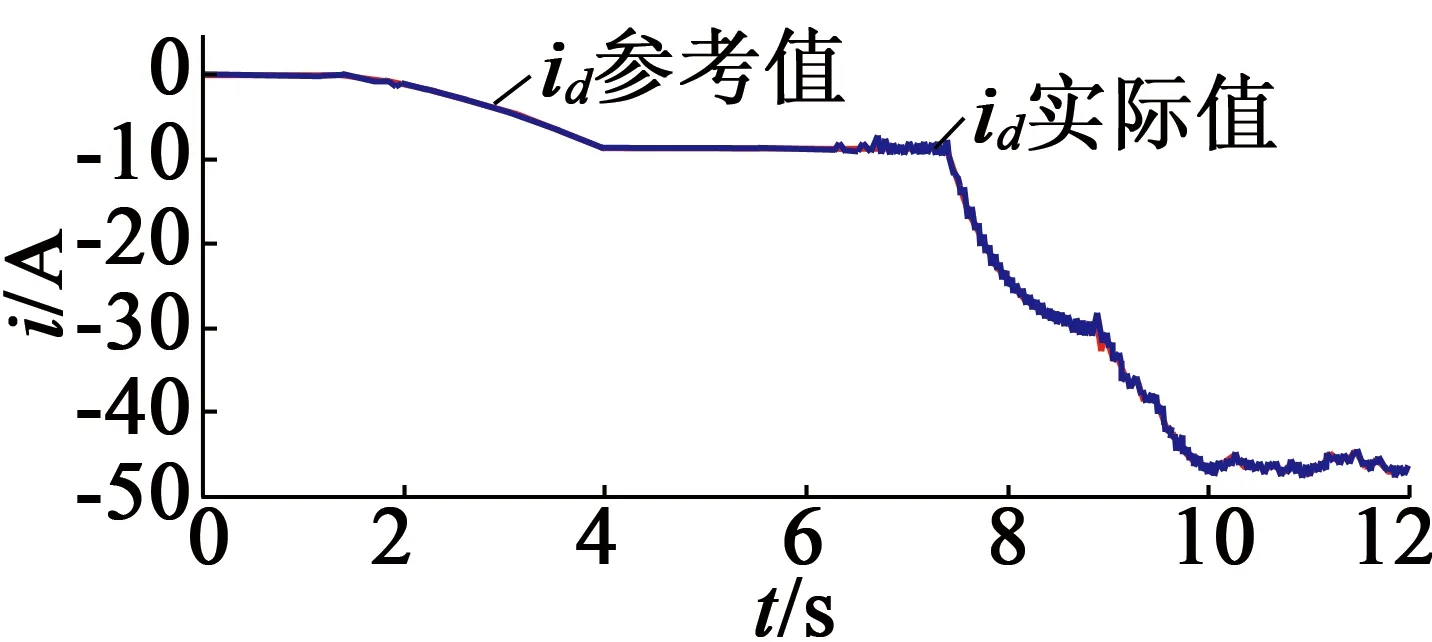
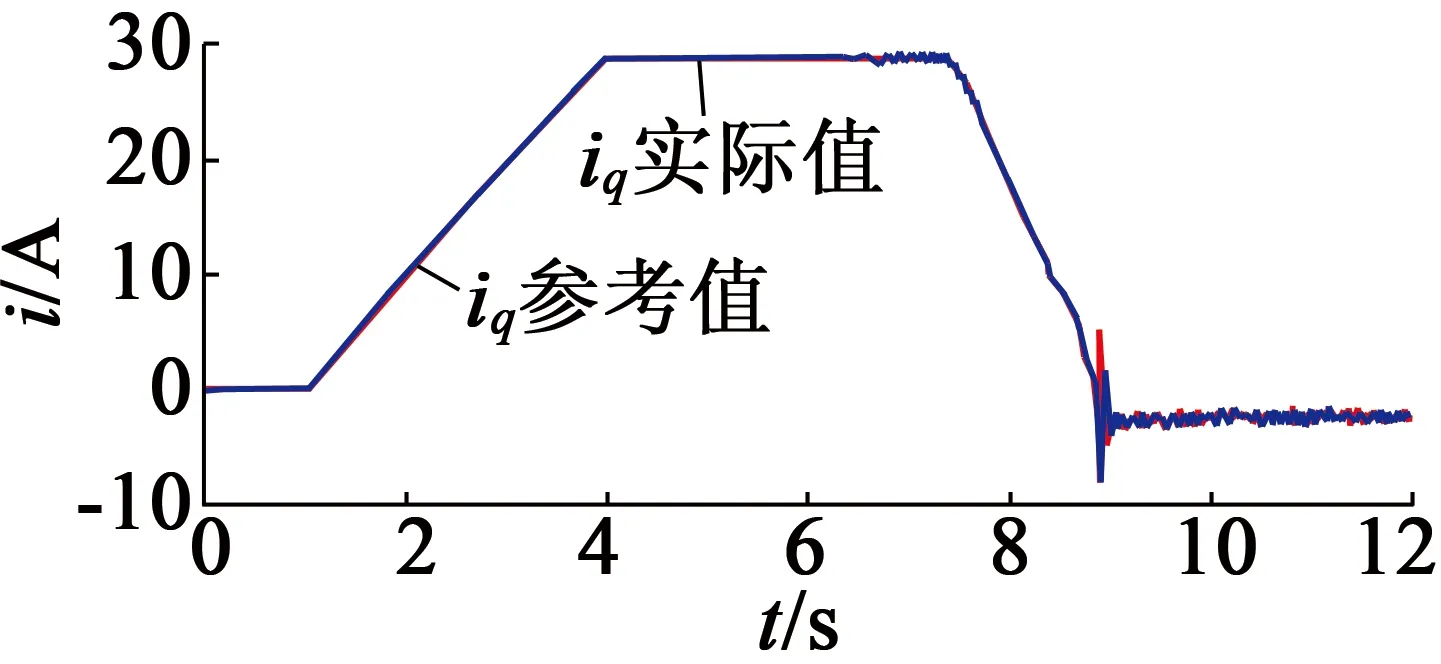
图8 FOC-PI控制下id,iq参考值与实际值比较图
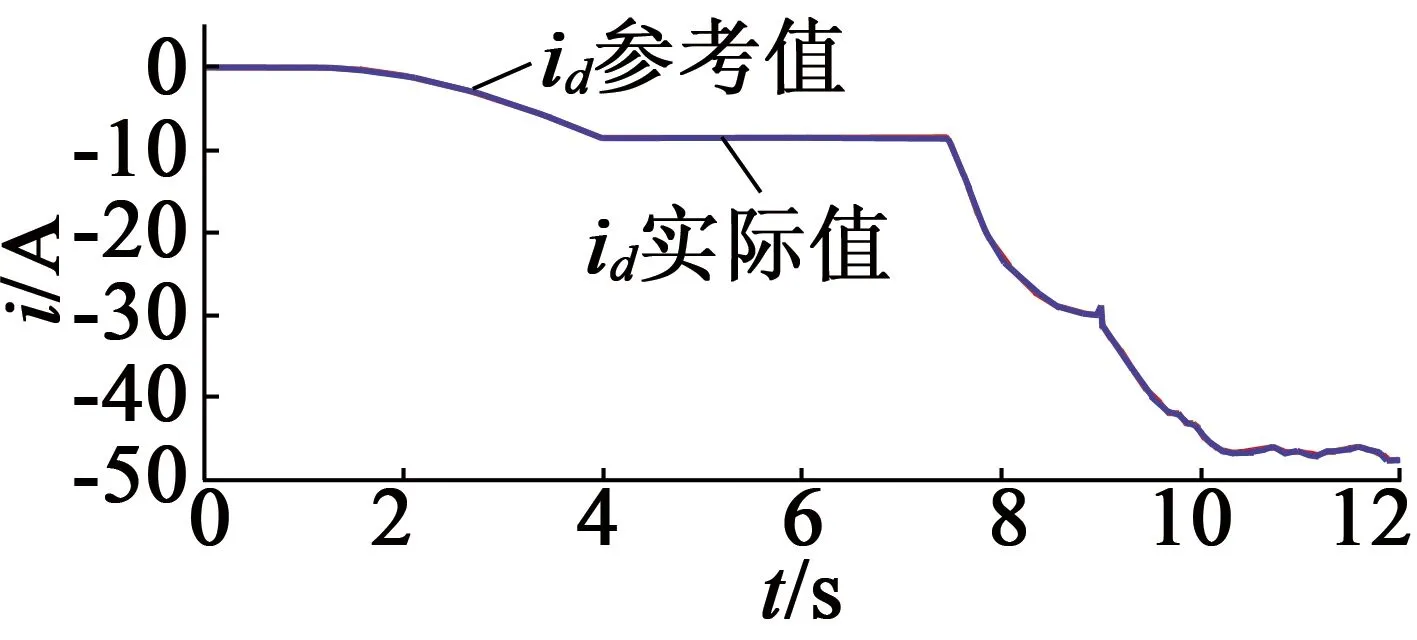
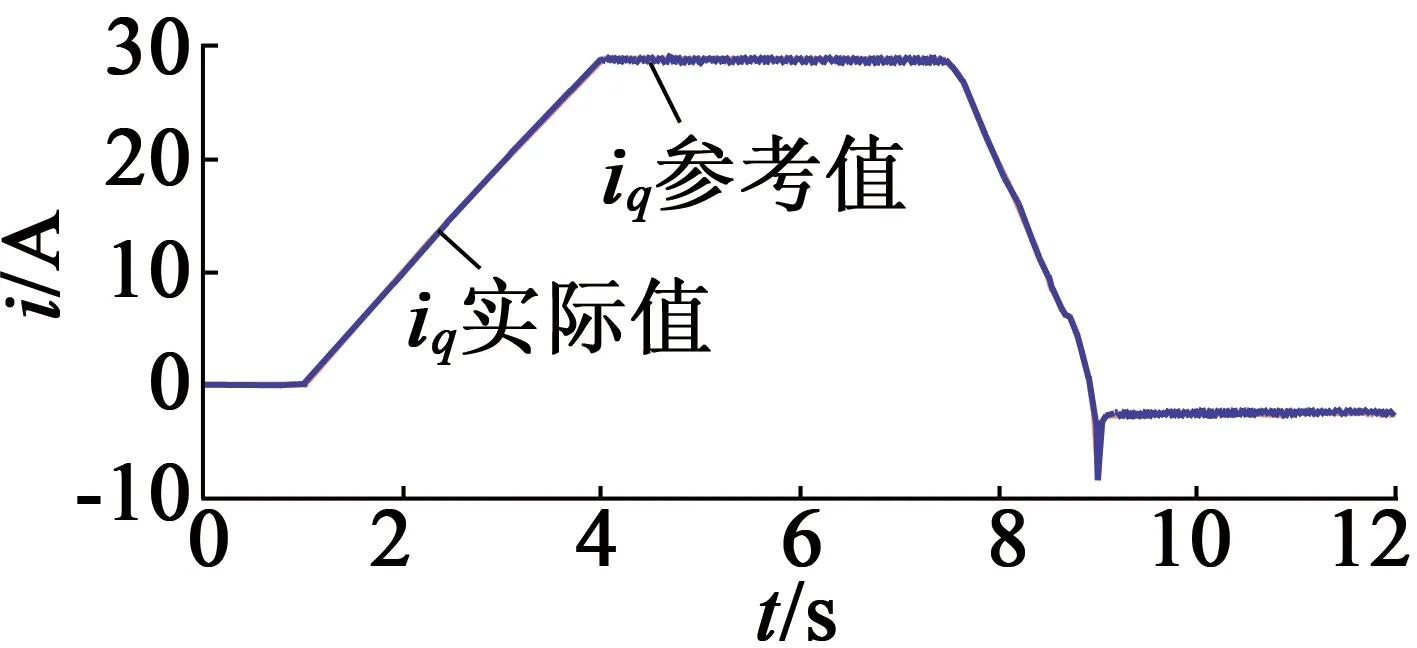
图9 MPC控制下id,iq参考值与实际值比较图
由图8、图9可以看出,传统控制方式下振荡较多,与id,iq给定实际参考值的曲线拟合较差,控制精度一般。而MPC与id,iq给定实际参考值的曲线拟合基本重叠,表明id,iq的输出值与给定实际参考值基本一样,控制精度较高,相比传统的FOC-PI控制方式,本文的MPC对id,iq的控制更加优化。
3.2 实验
在1.5 kW的内置式PMSM系统上进行实验 ,采用型号为TMS320F2808 的DSP实现算法,并搭建了如图10所示的实验平台。
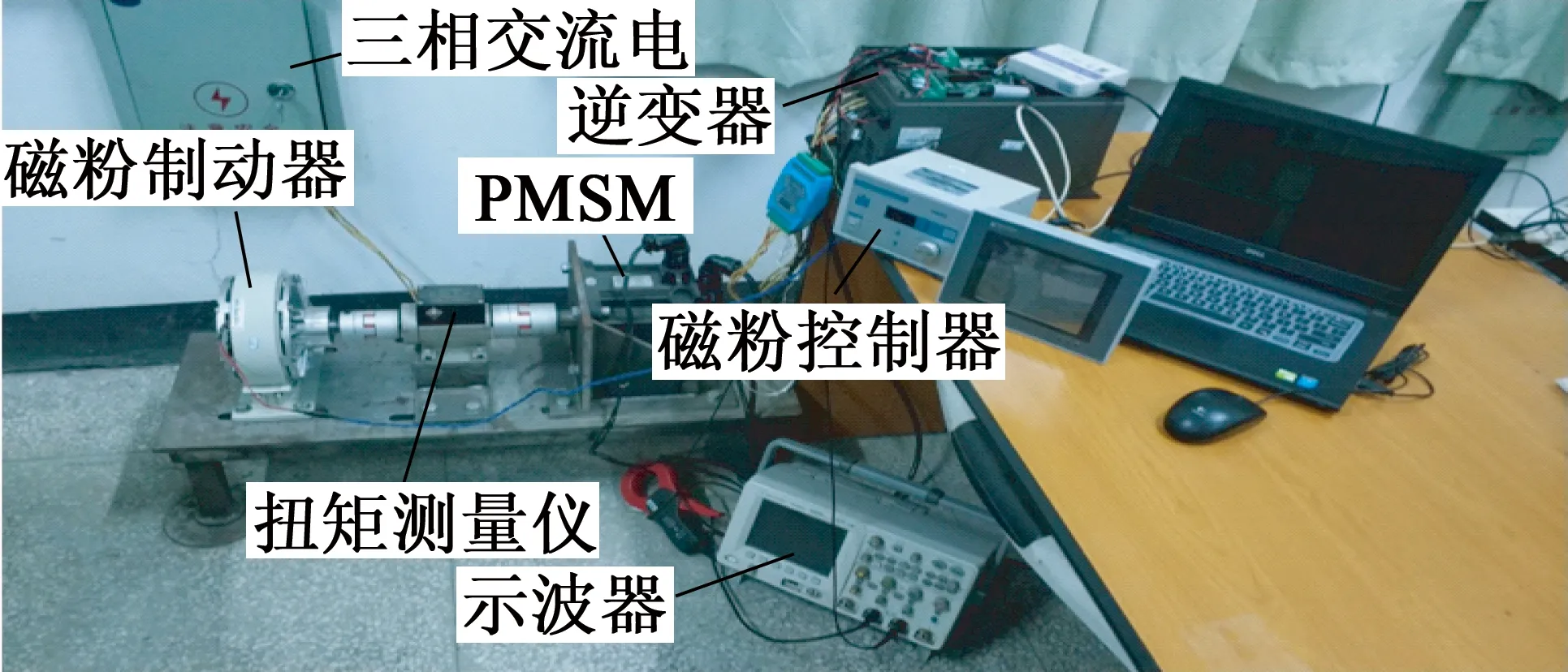
图10 实验平台
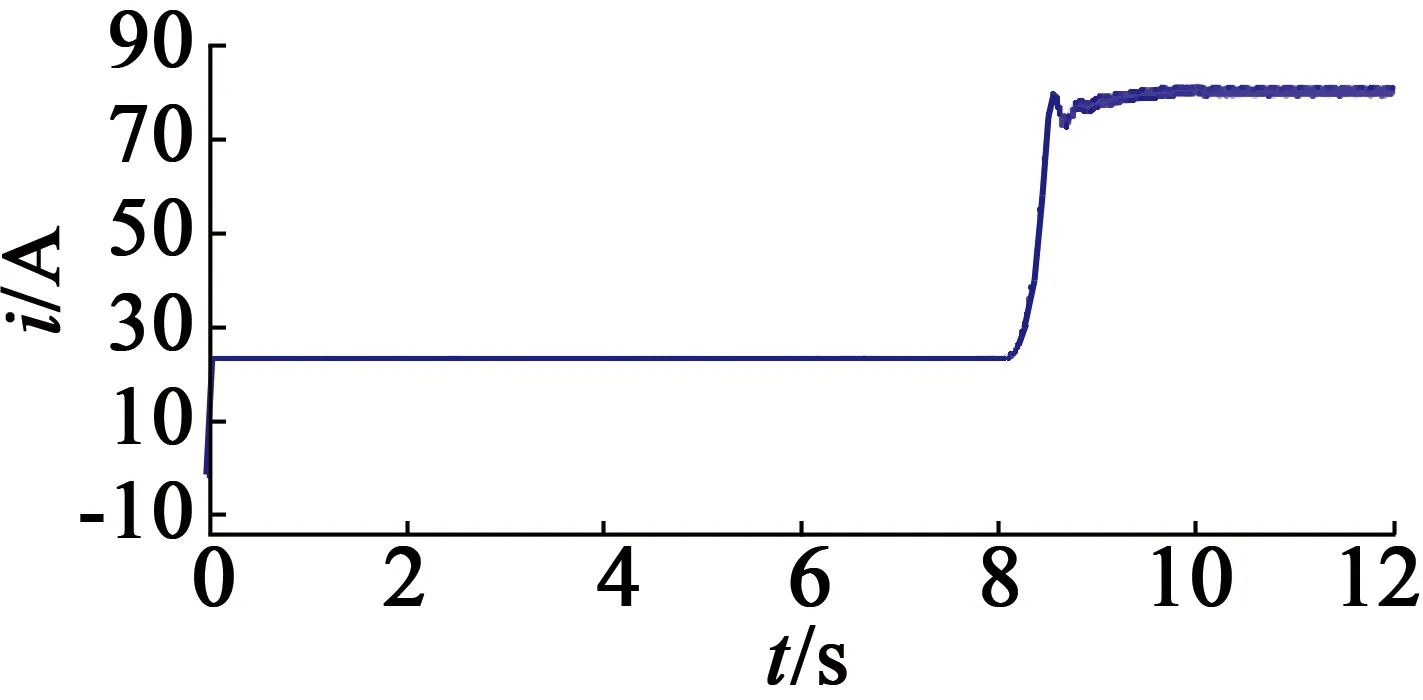
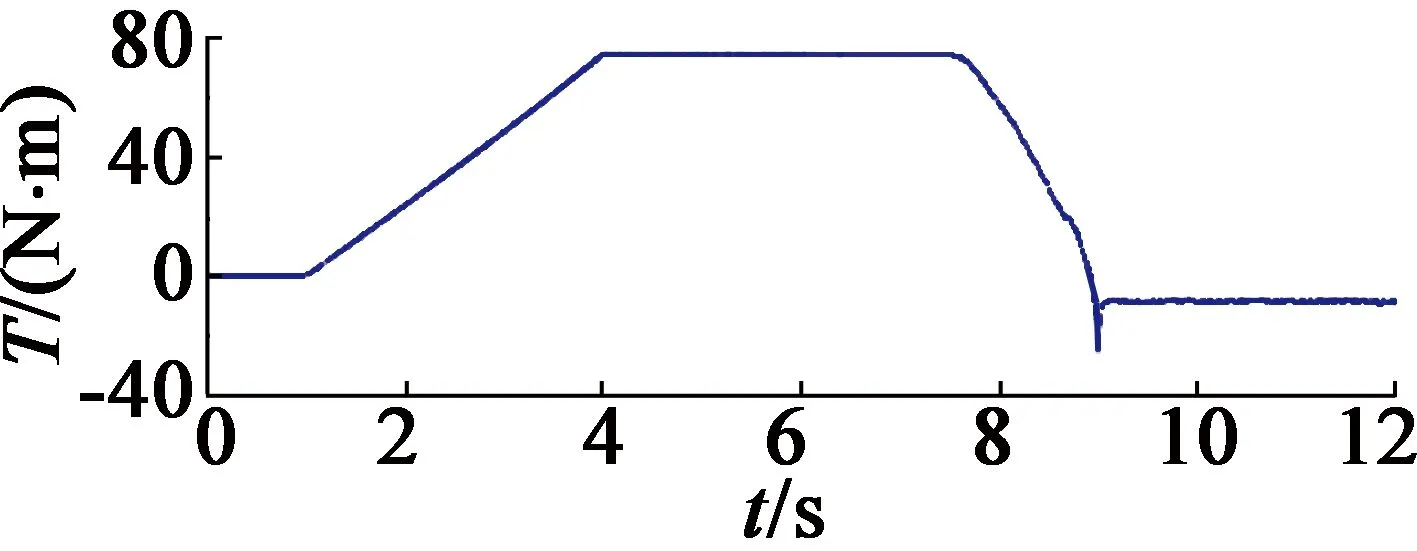
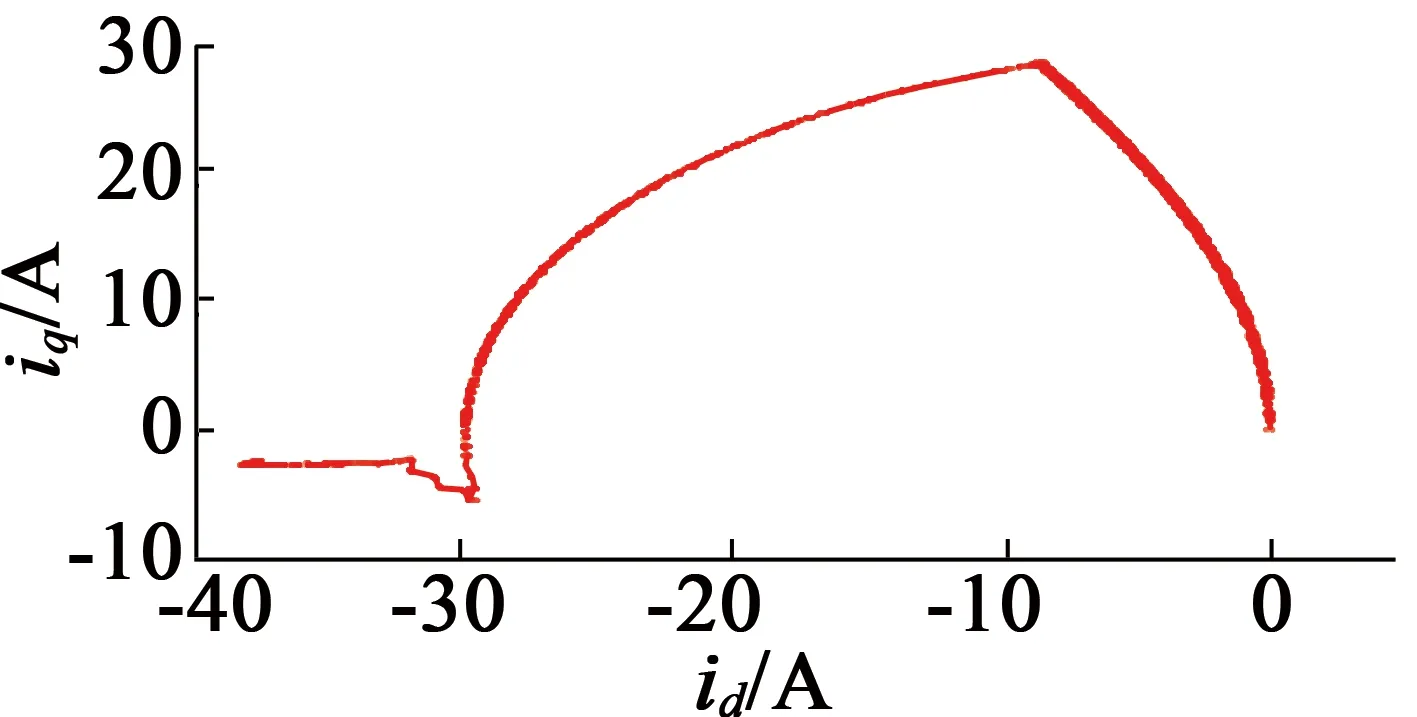
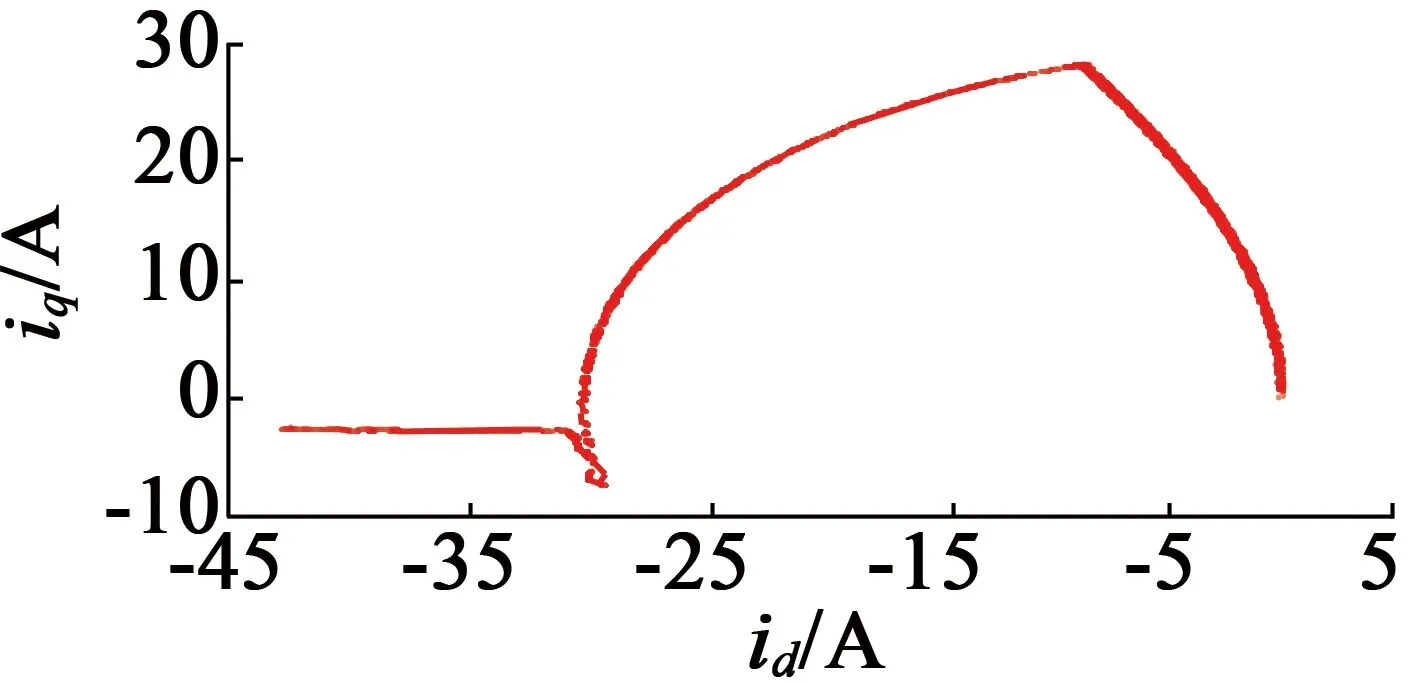
实验中,电机转速从0增加到2 000 r/min,整个过程时间设定为12 s,电流传感器测相电流的瞬时值,电压传感器测线电压的瞬时值。在后期电压电流稳定不变时,取时间间隔为0.01 s的电流幅值的相电流瞬时值和线电压瞬时值,其实验结果图如图11所示。
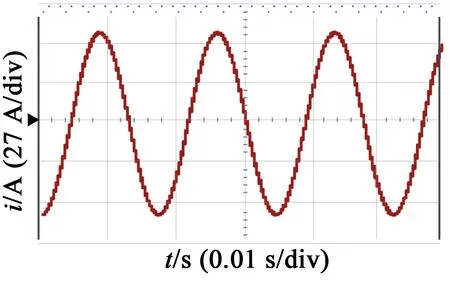
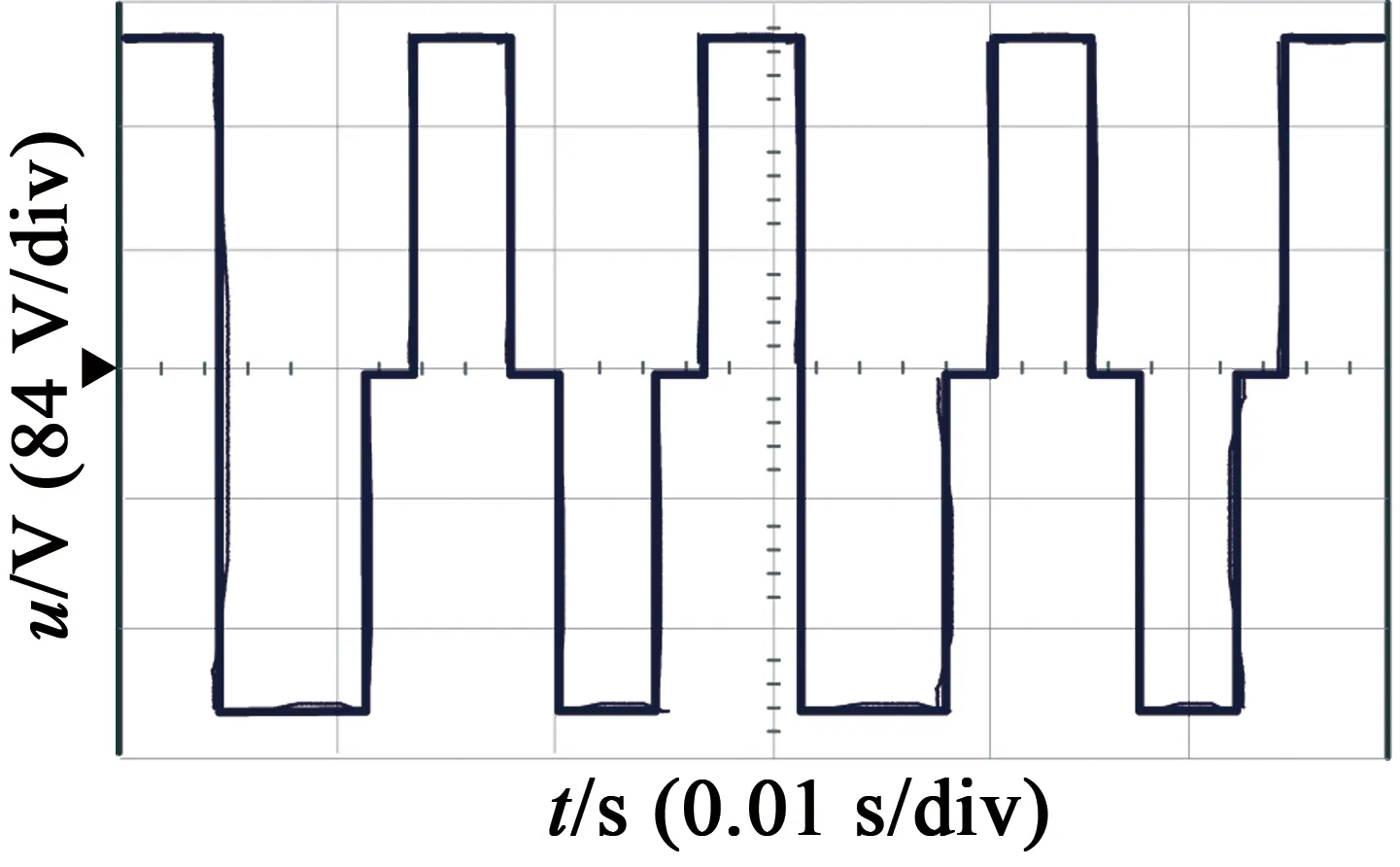
(a) 采用MTPA电流优化的MPC控制结果
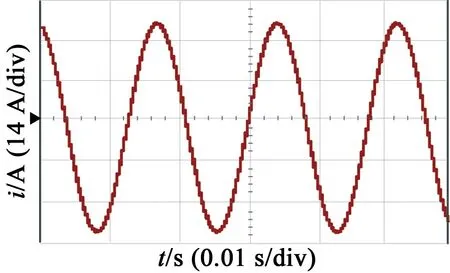
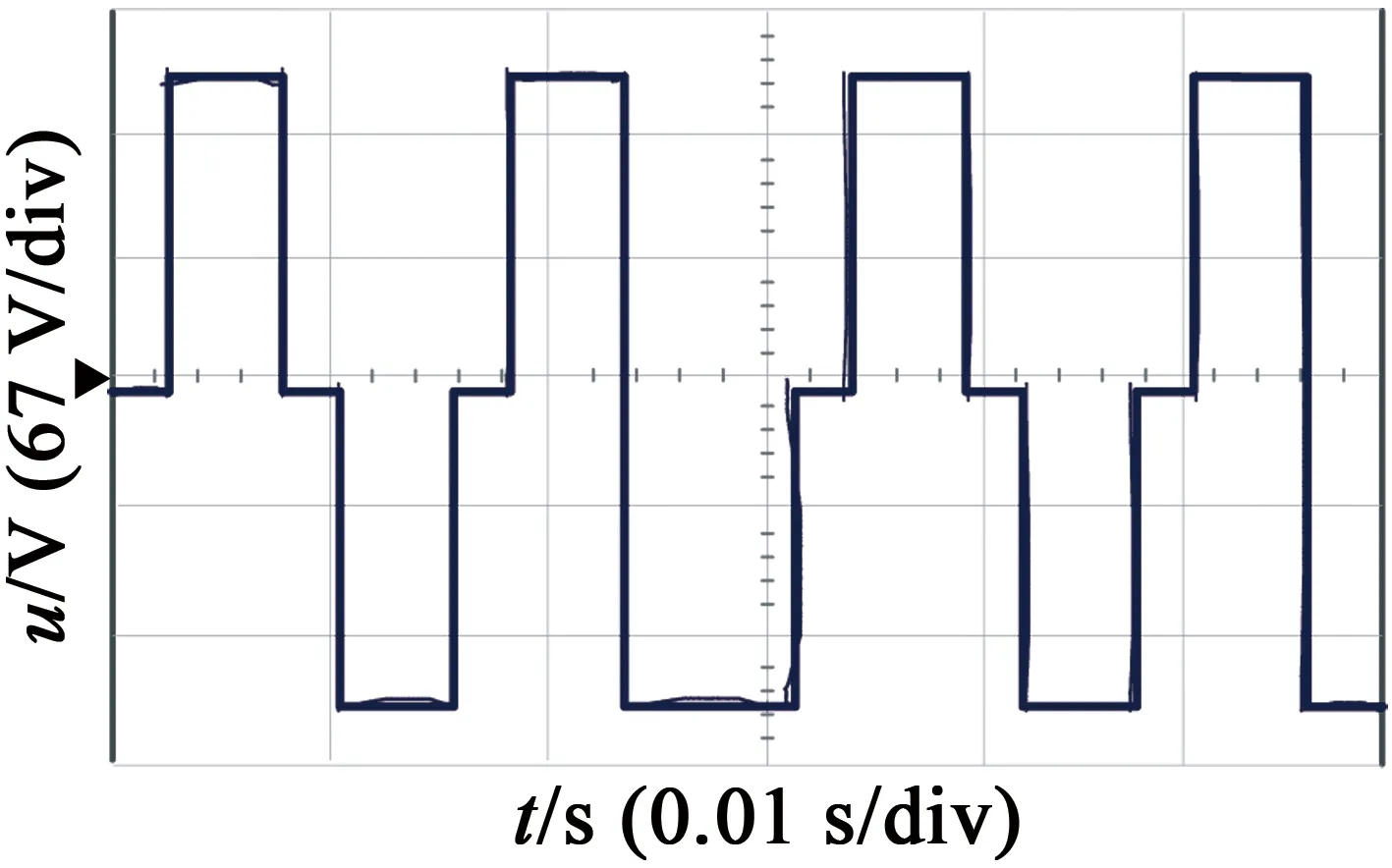
(b) 采用电流优化迭代算法的MPC控制实验结果图11 采用MTPA和电流优化迭代算法的MPC控制实验结果
由图11可得,在MTPA控制下,相电流瞬时值最终稳定在59.14 A,电流幅值为83.62 A。线电压瞬时值最终稳定在227.80 V,电压幅值为185.98 V。在本文电流优化迭代控制算法下,由于电压限制的优先级最高,电流其次,所以首先满足电压限制在135 V左右。相电流瞬时值最终稳定在34.66 A,故其电流幅值为48.87 A。线电压瞬时值最终稳定在167.10 V,其电压幅值为136.58 V,仅为MTPA控制下的电压大小的73.44%。其次限制电流,虽然电流限制值为30 A,最终也将其限制在48.87 A,仅为MTPA控制下的电流大小的58.44%。故本文所选取的电流优化迭代控制算法方式比MTPA更为优化。
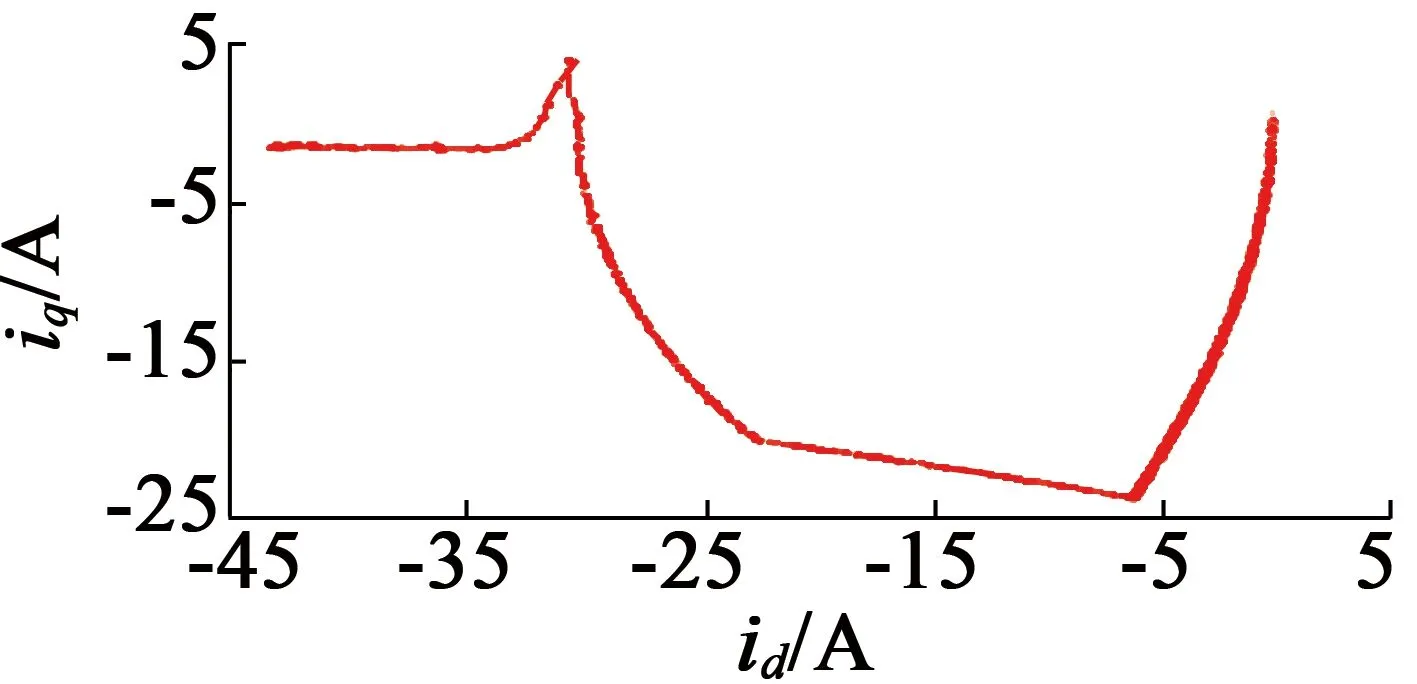
通过电流优化迭代控制算法得出电流最优值后,分别用传统的FOC-PI控制和本文的MPC来进行控制,比较两种不同的方式下电机的实际id,iq辐值,如图12所示。
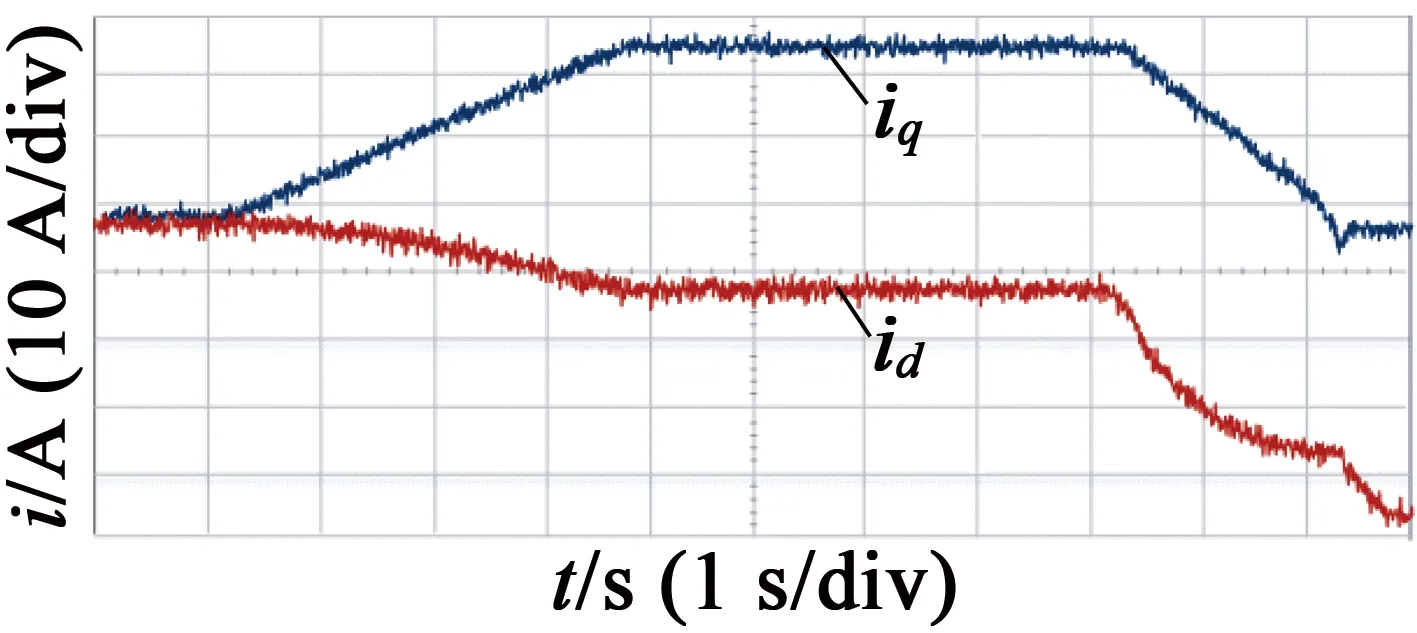
(a) FOC-PI
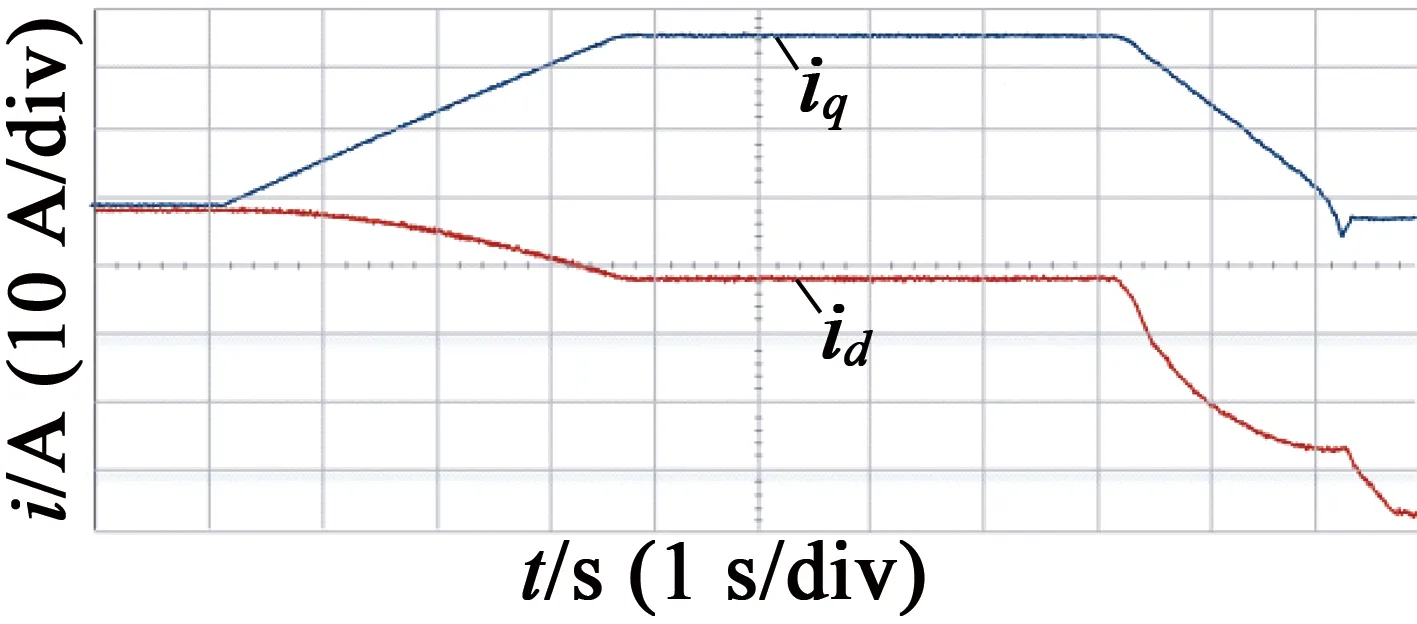
(b) MPC图12 FOC-PI和MPC下电机id,iq输出值
由图12可见,FOC-PI控制下,曲线拟合跟踪较差,控制精度一般。而MPC与id,iq给定实际参考值的曲线拟合基本重叠,控制精度较高,相比传统的FOC-PI控制方式,MPC对id,iq的控制精度更高。
4 结 语
本文提出了一种优化的PMSM电流迭代控制算法,基于PMSM特性进行最大效率工作点的选取,对非线性的特性曲线运用迭代法进行数值求解,在保证计算量较小的同时,求取较为准确的解,从而实现一种在满足转矩转速需求的同时,具有高效率与快速动态响应。对工作点的选取和计算均基于PMSM原始的非线性特性曲线,相较于线性化方式,大大弱化了电压约束条件,因此获得的目标工作点更为准确。求取准确度不受负载以及目标转矩的影响,避免了出现因计算误差而导致的转矩不稳定甚至振荡情况的出现。同时采用MPC使电机实际定子电流值与预测值无限接近。仿真和实验验证了该策略的特点及优势。
