基于协同滤波和BP神经网络的电力作业人员运动工况辨识*
2019-11-18徐国垒张文斌唐立军周年荣
徐国垒, 张文斌, 唐立军, 周年荣,3
(1.昆明理工大学 机电工程学院,云南 昆明 650500;2.云南电网有限责任公司电力科学研究院,云南 昆明650217;3.重庆大学 电气工程学院,重庆400044)
0 引 言
随着传感技术快速发展,复杂电力作业环境下电场强度、电压等级、磁场强度等隐含信息的测量技术研究越来越多,同时可基于该类测量技术进行预警装置研制。预警装置中电压等级辨识技术的原理为相同条件下电压等级越大电场值变化越快;但实际作业环境中不同工况会导致电压等级误判,如电压等级相同的带电体,作业人员爬塔靠近与水平靠近两种工况下,采集到的电场值变化快慢截然不同,导致识别出来的电压等级极可能不同;同时电压等级的误判影响预警装置的报警阈值设置,降低预警准确率。
目前人体行走工况辨识的方法主要有图像辨识和惯性辨识,其中图像辨识存在易受障碍物影响、不便于携带、成本高等缺陷;惯性识别均利用加速度传感器测量作业人员在不同工况下运动过程中,加速度传感器采集加速度值波动幅值大小不同识别运动工况,但是该方法测量过程中误差大,且易受作业人员额外动作影响,导致误判率高。
为了提高预警准确率,本文对水平靠近带电体、斜坡靠近带电体及爬塔靠近带电体3种工况辨识技术进行研究[1]。并提出基于协同滤波和反向传播(back propagation,BP)神经网络的电力作业人员运动工况辨识;由于不同工况下电力作业人员运动时头部的加速度与气压值变化特性不同,提取加速度值与气压值的特征参数建立BP神经网络模型[2~4];该方法具有便于携带、成本低、辨识准确率高等优点,不仅可以辅助提高电力作业中预警准确度,还可以广泛应用于其他领域。
1 运动工况识别系统模型建立
整体模型主要包括特征数据采集、特征参数提取、工况辨识[5~8]。其实现步骤为:先将气压传感器、加速度传感器安装在作业人员的头部,采集头部的气压值和三轴加速度值,对加速度值与气压值进行数据预处理提取特征参数,最后以特征参数作为输入建立BP神经网络模型[9~16]实现工况分类。
2 数据预处理
可靠的数据预处理是模式识别关键,本文选取MPU6050型加速度传感器与MS5611型气压传感器采集作业人员运动过程中的加速度值与气压值,两种传感器均为高精度、高灵敏度传感器,采集到的数据中存在大量噪声,同时气压传感器采集的气压值在静态过程中易发生漂移,导致传感器直接测量到的数据不适合直接使用,本文提出利用信息协同滤波方法提取有效相对高度值,最后对有效相对高度值进行一阶拟合,获取拟合参数,其数据预处理结构图如图1所示。
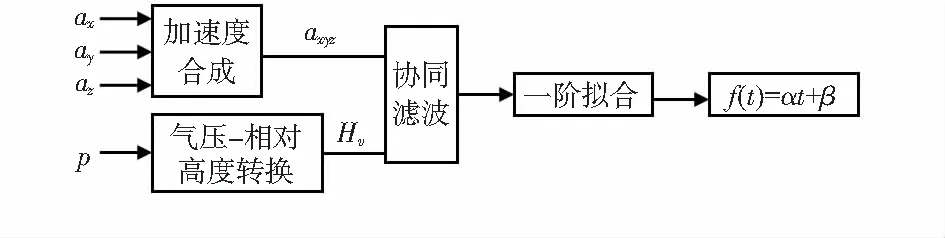
图1 数据预处理结构
图1中,ax,ay,az分别为传感器内部坐标系X轴、Y轴、Z轴上的加速度值,axyz为三轴合加速度值,p为采集到的气压值,Hv为气压值p对应的海拔高度值,H为协同融合后的有效相对高度值,t为采集数据次数,f(t)为有效相对高度值H与采集数据次数t的拟合函数。
2.1 数据转换

(1)

2.2 信息协同滤波
当作业人员运动过程中相对初始位置的海拔高度发生变化时,气压传感器采集气压值经过转换公式得到的海拔高度变化值可有效反映出相对高度变化量,作业人员处于静止状态时,气压传感器采集到的气压值存在较大的漂移,且作业人员身体的晃动、自然环境下风、温度变因素也将影响气压传感器采集到的气压值,转换后的相对高度值变化存在极大误差,导致实际上所处位置的海拔高度变化不明显,计算的海拔高度依然存在变化,不能准确反映作业人员运动过程中相对初始位置的高度变化量;当作业人员处于静止状态时,加速度传感器采集到的合加速度幅值变化量小,当作业人员处于运动状态时,加速度传感器采集到的合加速度幅值变化量较大,根据该特征可知加速度传感器能较好地识别作业人员是否处于运动状态,由气压传感器与加速度传感器在运动过程中采集到的数据关联性,本文采取信息协同滤波提取有效相对高度值,即设置一个加速度阈值A,当加速度传感器采集到的合加速度值波动幅值大于阈值A,气压传感器采集到气压值p转换后的相对高度值H变化有效,否则无效。
2.2.1 加速度阈值设置
加速度阈值A设置过大,容易忽略有效信息,加速度阈值设置过小,一些无效信息容易被误认为有效信息,为此,本文通过设计实验,将加速度传感器及气压传感器安装在实验人员头顶,采取让被实验人员运动一段时间再静止一段时间的方法,采集10组数据,每组采集500次数据,对每组数据中静止过程、运动过程的合加速度值分别求算数平均值,再求测量值与算数平均值做差后的平均值γ,其γ计算公式为
(2)
式中at为t次测量到的加速度值,N为每组测量次数且N=500;计算10组数据得到γ统计如表1所示。
通过表1可以看出:10组运动过程中γ值的平均值为1 551.832,静止状态下γ为187.178 4,因此,设置加速度阈值A为两个平均值的中值869.5。

表1 运动、静止状态下γ值
2.2.2 有效相对高度值可靠性验证
设计作业人员携带加速度传感器、气压传感器在坡度约为30°的斜坡上行走,作业人员行走一段时间,停止一段时间,该过程中,加速度计、气压计采集140次数据为一组,计算该组数据中的合加速度,计算加速度阈值γ值,当γ>A时,运动过程中相对起始位置的高度变化H有效,否则无效;通过该方法,提取有效相对高度值,随机抽取其中一组数据绘制曲线如图2(a)所示。由图2(a)可以看出:经协同滤波后的有效相对高度值相对原始高度值更平滑,因此利用信息协同滤波处理作业人员在水平、斜坡、杆塔3种不同工况下运动采集的加速度值与气压值,提取有效相对高度值变化,从采集到的所有数据中每种工况随机提取10组数据绘制处理后的有效相对高度变化曲线图如图2(b)所示。

图2 有效高度验证结果
2.3 数据拟合
根据图2(b)可以明显地看到,作业人员在爬塔、爬坡、水平行走3种工况下的有效相对高度值变化快慢不同,且变化曲线近似一元二次方程曲线,因此对有效相对高度值变化曲线进行一阶拟合,设拟合函数为f(h)=αt+β,其中t为采集数据次数,h为相对高度值,选取室外的杆塔安全区、室外坡度约为30°的斜坡及水平路面作为实验平台,每种工况采集400组数据,总的数据组数为1 200组,分别对1 200数据的有效相对高度值进行一阶拟合,得到拟合参数α与β; 建立BP神经网络模型,每种工况随机抽取350组拟合参数α与β作为训练输入,其余拟合参数作为测试。
3 BP神经网络算法
BP神经网络包含多个隐含层,具备处理线性不可分问题的能力,具有自学习和自适应能力,泛化能力强,有一定的容错能力,因此本文选择BP神经网络模型进行作业人员工况识别。
3.1 BP神经网络模型建立
BP神经网络模型由三个部分组成,分别为输入层、隐含层、输出层,每层含有不同数量的神经元[11~13]。该模型中设期望输出值为D=[d1,d2,…,dn],(n∈R),实际输出值为Y=[y1,y2,…,yn],期望输出值与实际输出值误差为E=[e1,e2,…,en],计算误差值的标准差σ,设误差阈值为ξ,当σ<ξ,更新权值达到要求,停止训练并得到最终的BP神经网络权值参数。

令隐含层输出H中的元素计算
hi=f(wi×xj+bi)
(3)
将xj=[αjβj]′,wi=[w1iw2i]代入式(3)得到
hi=f(w1i×αj+w2iβj+bi)
(4)
令B=[b1b2…bp],隐含层输出矩阵H计算
H=f(W′×X+B′)
(5)
令输出层权值为Q,Q=[q1q2…qp],则输出层Y误差E的计算公式为
Y=Q×H,E=D-Y
(6)
令隐含层与输出层之间的局部梯度G=[g1,g2,…,gn],输入层与隐含层之间的局部梯度L=(lij),则权值 更新计算公式计算
(7)
3.2 实验验证结果与分析
利用BP神经网络模型对采集数据进行训练及测试,其训练结果如图3(a)所示,利用其余数据进行测试,其测试结果如图3(b)所示,图中 “*”所在纵坐标为1时,辨识运动工况为水平行走,“*”所在纵坐标为2时,辨识运动工况为爬坡,“*”所在纵坐标为3时,辨识运动工况为爬塔,“o”表示识别出现错误。

图3 训练与测试结果
对图3辨识结果分析如表2所示。
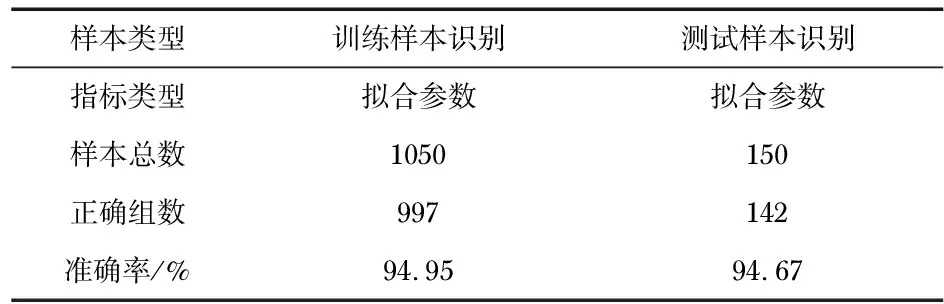
表2 结果分析
4 结 论
训练及测试结果表明:训练准确率达到94.95 %,测试准确率达到94.67 %,该方法具有便于携带、成本低、辨识准确率高等优点,不仅提高电力作业中的相关信息测量准确度,还具有广泛的运用市场。
