基于测角精度的多目标实时交会匹配方法*
2019-11-13杨增学张治政王维强
杨增学,雷 灏,张治政,王维强
(华阴兵器试验中心, 陕西华阴 714200)
0 引言
常规武器导弹、火箭弹、子母弹等试验中连发齐射多目标弹道[1]的实时交会处理结果,对评估武器系统性能,动态组网测试、试验态势监测、试验辅助决策等均有重要作用及意义。其中,同名点匹配[2]是多目标弹道实时交会处理的重要组成部分。
现有的多目标同名点匹配算法模型基于空间异面直线距离。在多目标试验测量中,由于光学设备测试布站对称性差和测量目标距远近的不同,给异面直线距离设定合适阈值较困难,导致多目标交会匹配算法适应性不强和实时性较差。因此,提出一种新的基于测角精度[3]的多目标光学测量实时交会匹配方法,该方法以测角精度为基础,通过双站交会、多站验证筛选,有效地提高多目标光学测量处理的自适应性、实时性、准确性和可靠性。
1 基于测角精度的多目标实时交会匹配算法
1.1 算法原理

1.2 模型建立
设发射坐标系[4]为O-XYZ,测量站址O1、O2坐标为(X01,Y01,Z01)(X02,Y02,Z02),目标T相对于O1、O2的方位角和俯仰角分别为A1、E1,A2、E2;O1T1与O1O2的夹角为φ1,O2T2与O1O2的夹角为φ2,O1T1与O2T2的夹角为φ12;O1O2的空间距离为Bl。设异面直线O1T1、O2T2的公垂线为r,T1、T2分别为两条异面直线与其公垂线的交点,其坐标分别为(X1,Y1,Z1)、(X2,Y2,Z2),如图1所示。
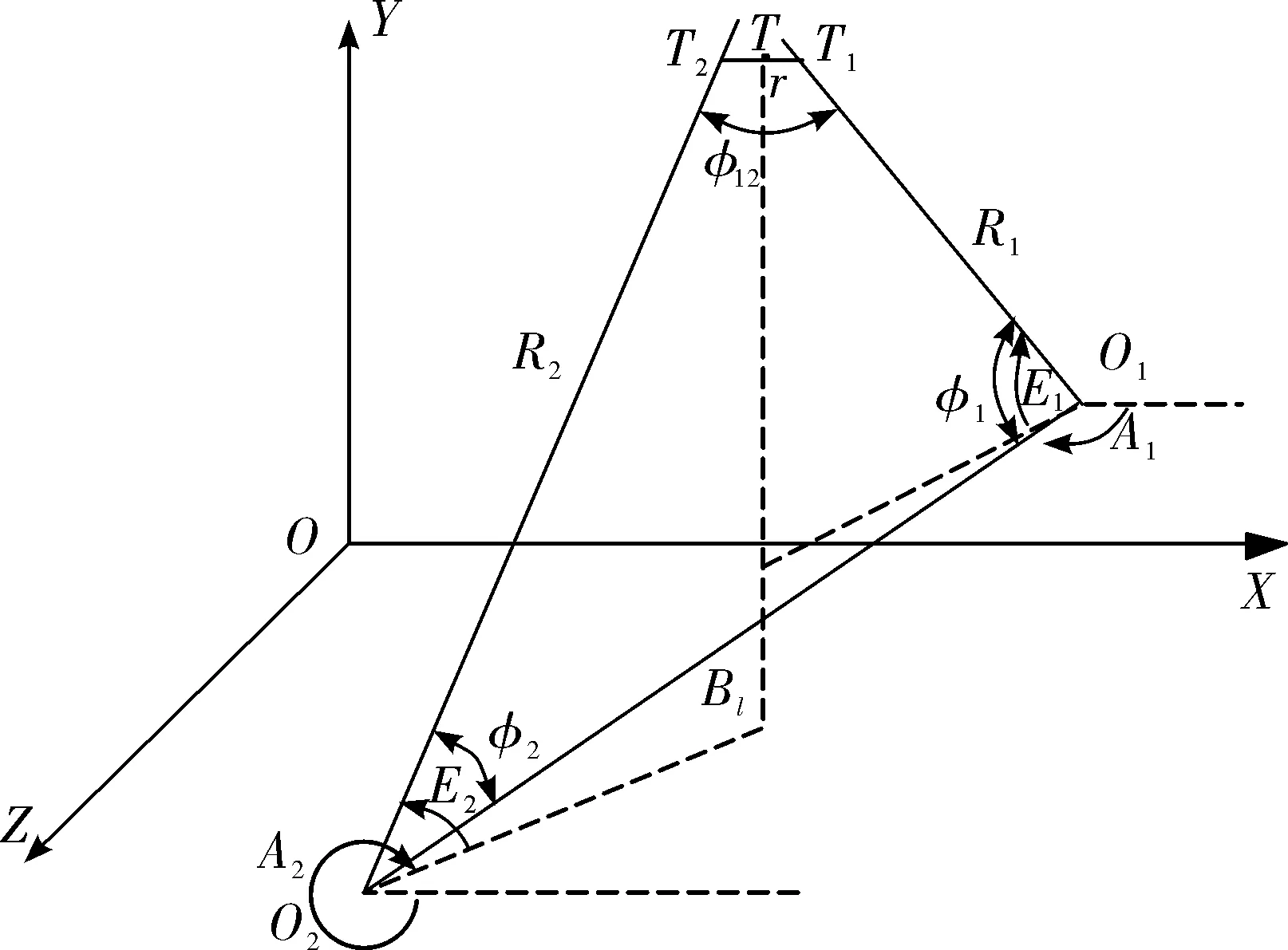
图1 光测设备双站异面交会[5]示意图
1)求取异面直线公垂线之间的距离
根据空间解析几何理论,可得异面直线公垂线之间的距离为:
r=((X2-X1+R2cosA2cosE2-R1cosA1cosE1)2+ (Y2-Y1+R2sinE2-R1sinE1)2+ (Z2-Z1+R2sinA2cosE2-R1sinA1cosE1)2)1/2
(1)

2)建立测量精度与测角精度、测量目标距离的数学模型
由于光学设备测量误差的存在,各测站计算出测量得到的方位、俯仰角后,相当于由该站光学镜头中心Oi引出一条指向目标的射线OiTi,如图2所示。
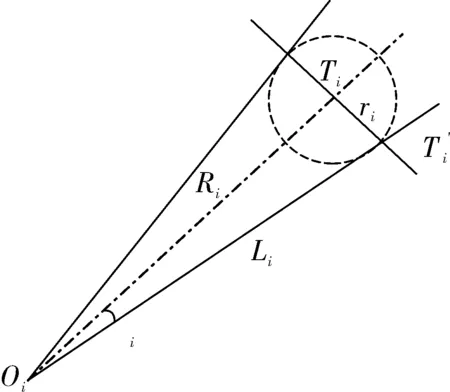
图2 测量精度与测角精度、测量目标距离的关系

(2)
式中σri=Ri·σγi。
3)确定目标与两射线公垂线的位置关系
对于双站交会测量,测量设备中心与目标构成有一定误差的两条射线,T点是关于r1、r2两个独立变量的二维分布,则目标T点对(r1、r2)对应的似然函数R(r1、r2)为:

(3)
根据最大似然估计理论,目标T最有可能落在使似然函数极大的位置上,目标T的最优估计为异面直线R1、R2距离和最小的点,即目标T的最优估计在R1、R2的公垂线上。
4)计算r1、r2的值
由于O1T1和O2T2的公垂线r是唯一确定,当μ=0时,可得似然函数R(r1、r2)为:
(4)


由上分析可得,基于测角精度的多目标实时交会匹配算法模型为:
(5)

X1、Y1、Z1为测站O1在发射坐标系中坐标;X2、Y2、Z2为测站O2在发射坐标系中坐标;A1、E1为测站O1的测角信息方位角、俯仰角;A2、E2为测站O2的测角信息方位角、俯仰角。
1.3 算法流程

多目标光学实时交会匹配算法流程为:
Step1:取测站O1、O2同一帧测量所有目标像点进行排列组合,构成序列目标像点对。设同一帧测站O1拍摄m个目标像点,测站O2拍摄n个目标像点,经组合后形成m×n个目标像点对。

Step3:删除所有没标注的目标像点。
Step4:重复Step1至Step3直到所有帧目标测量点弹道识别完成。
1.4 算法应用
在多目标实时交会处理中,我们通常采用三个或多个测量站进行交会处理,然后用另外几个测量站数据进行筛选的测量方法。在筛选过程中采用相应设备测角精度指标进行多目标同名点匹配处理,剔除初步交会处理产生的假目标,获得最终的真目标相关数据。实时交会处理流程如图3所示。

图3 多目标实时交会处理流程
2 试验验证
为了验证文中提出的基于测角精度的多目标实时交会匹配算法鲁棒性、实时性和可靠性,采用VC++6.0软件开发工具,研发了多目标实时交会处理软件进行验证。
1)地面布设20个发光目标模拟试验验证
该模拟试验采用在地面上布设20个目标,利用3个测量站进行模拟测量。首先1#和2#测量站进行多目标交会匹配初步筛选,然后将其结果投影到3#测量站进行多目标交会匹配精细筛选,初步获得最终的多目标交会匹配结果。
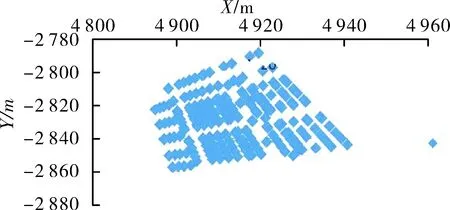
图4 交会匹配初步筛选结果

图5 交会匹配精细筛选结果
初步筛选和精细筛选结果分别如图4、图5所示,通过上述两次应用基于测角精度的多目标交会匹配算法筛选以后,从测量目标210个中有效识别出21个目标,覆盖了全部20个模拟目标,表明该算法适应性好、准确度高。通过后续的多目标弹道识别方法,对于21个目标再进行弹道识别处理便可以剔出多余的一个假目标,最终可得地面模拟20个多目标交会匹配最终结果与实际真值数据一致。
2)某型多管火箭弹7连发试验验证
在某型多管火箭炮连发齐射试验时,采用某型红外弹道相机对7连发火箭弹目标进行跟踪测量,其左右站弹道识别情况如图6所示。由图6可以看出,针对某型火箭弹7连发多目标弹道出现断点和交叉的情况,多目标弹道实时识别准确、有效和可靠。

图6 某型多管火箭弹7连发目标跟踪测量左右站弹道实时识别情况
3 结论
1)针对火箭、导弹、子母弹等连发齐射多目标光学测量实时交会处理中现有多目标交会匹配算法适应性不强和实时性较差的问题,提出了基于测角精度的多目标光学测量实时交会匹配新方法,建立了多目标实时交会匹配算法模型,有效地提高了多目标光学测量实时处理能力。
2)通过试验验证,基于测角精度的多目标实时交会匹配方法,可以有效提升多目标光学测量处理的自适应性、实时性、准确性和可靠性,特别适用于火箭、导弹等武器系统连发齐射实时评估综合毁伤效能、试验态势监测和试验辅助决策。
