基于修正Z变换法的数字控制系统
2019-11-09杨栩
杨 栩
(成都师范学院物理与工程技术学院,成都611130)
0 引言
数字控制系统中存在数字部分和连续部分,系统中含有采样信号,而被控对象大多为连续信号,数字控制系统可以等效为一个数字系统,用Z变换法来分析系统,系统输出响应为周期采样点上的输出。采样周期之间的输出信息很难获得,如果要得到更多的输出点信息,一般通过改变采样周期的大小来实现。但是采样周期T不能随意改变,减小T可以获取更多的采样点信号,信号恢复精度越高,但是T过小,会使执行效率下降,增加运算,在工程实践中也不允许T过小,这会给信号恢复和分析带来困难。
修正Z变换法在不改变采样周期T的前提下,通过对系统输出增加一个虚拟延时环节,在采样周期内任意延时,通过修正Z变换法,能得到任意时刻的输出,从而实现信号的连续输出。
1 数字控制系统
在计算机控制系统中,控制系统由数字部分和连续部分构成的混合系统,在系统中有离散采样信号和连续信号,等效为数字部分和连续部分。数字部分表示计算机控制算法,输入和输出皆为离散序列,用D(Z)表示;连续部分等效为连续被控对象和零阶保持器串联构成。计算机控制系统结构框图如图1所示。

图1 数字控制系统结构框图
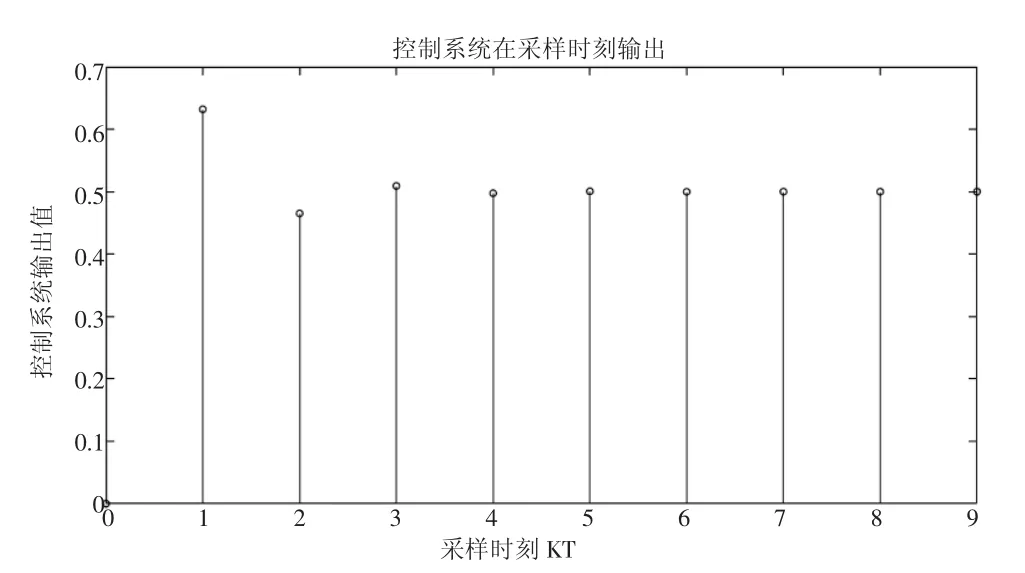
图2 控制系统在采样时刻输出值
系统分析时,只能得到控制系统在采样周期整数倍时刻的输出序列C(k),而被控对象大多是连续部分,实际输出是连续信号。为了能补齐采样点时刻之间的连续输出,可以采用修正Z变换法获得非采样点之间的输出。
2 修正Z变换法
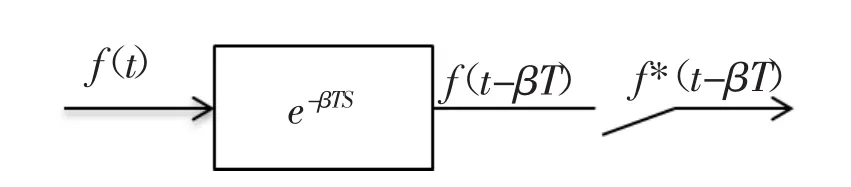
图3 输入信号 f(t)延时 βT(0<β<1)
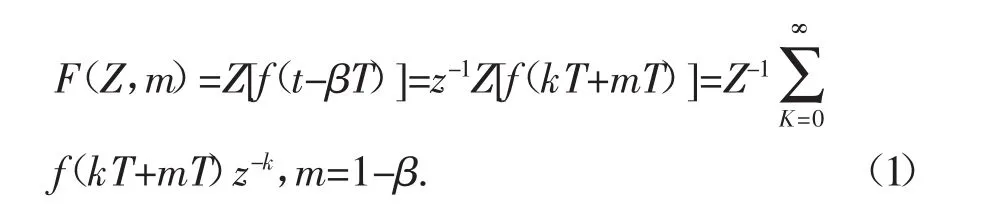
号f(t)的修正Z变换F(Z,m)表达式为式(1):
对于用F(S)表示的连续函数,修正Z变换表达式为式(2):
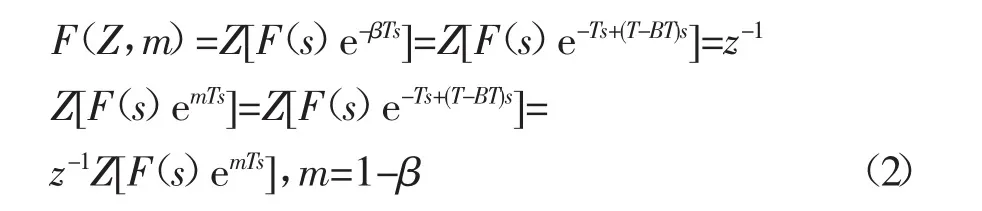
当m=0时,β=1,相当于信号延迟一个采样周期;当m=1时,β=0,若f(0)=0,则修正Z变换为一般Z变换。
3 修正Z变换法在数字控制系统中的应用
系统输出为连续信号,为了统一数字连续部分,可以给输出加一虚拟滞后环节(0<β<1),等效为时域的延时环节,计算机控制系统结构框图如图4所示:零阶保持器和连续系统等效为连续系统G(S)。
系统输出为式(3):

图4 计算机控制系统结构框图

虚拟滞后环节e-βTs(0<β<1),Z变换为修正Z变换 C(Z,m)表达式为式 4(m=1-β)。

采样系统经过修正Z变换后的系统函数为式(5)

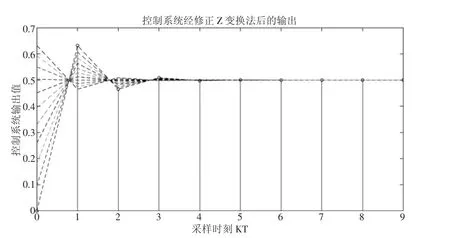
图5 控制系统经修正Z变换法后系统输出值
其中,红色圆圈处值为控制系统在整数倍采样周期时刻的输出值,不同颜色虚线表示控制系统经βT(0≤β≤1)延时后系统输出,通过延迟不同的时间,可以得到非整数倍采样周期时刻的输出信号。当β=1,输出与非修正Z变换输出一致,当β=0,输出恰好为非修正Z变换的下一采样点值,当0<β<1时,输出为非整数倍采样周期时刻的值,其值大小介于非修正Z变换的两个采样点值之间,本图中β取值步长为0.1。
为了更直观地观察控制系统非周期整数倍时刻的输出值,对控制系统采用修正Z变换法,延时时间步长取更小的β为0.01,将系统输出值与采样时刻对应,可以获取更多的非周期采样点上的输出值,控制系统经修正Z变换法后系统输出如图6所示。
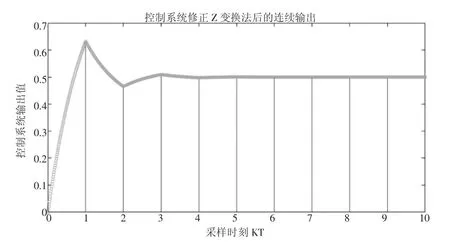
图6 控制系统经修正Z变换法连续输出响应
4 小结
通过仿真图可以看出,系统输出为连续输出,除了采样点处有值外,采样点之间也不失真的还原了连续系统的输出。本方法达到了预期效果。修正Z变换法在不改变采样周期T的前提下,通过对系统输出增加一个虚拟延时环节,能够得到任意时刻的输出,从而实现信号的连续输出。
