医用直线加速器自动摆位系统设计
2019-11-08唐涛杨蕾孙小杨杨波庞皓文石翔翔陈仁金
唐涛 杨蕾 孙小杨 杨波 庞皓文 石翔翔 陈仁金
西南医科大学附属医院肿瘤科,四川泸州 646000
0 引言
现代医学的发展对医疗设备的自动化和智能化提出了更高的要求,同时自动化技术在医学领域的应用也在不断促进医疗设备的现代化进程[1]。医用直线加速器现在已经广泛应用于肿瘤患者的外照射放射治疗,并且放射治疗已进入精确定位、精确计划、精确治疗的三精时代[2-3]。精确治疗要求计划的照射中心和医用直线加速器的等中心保持高度一致,这样才能保证治疗计划能精确执行。这要求技术人员在对肿瘤患者实施摆位时,能够精确控制摆位误差,从而减小照射中心与直线加速器等中心的相对位移。但是,在当前技术条件下,肿瘤患者摆位最普遍的仍然是人工摆位,即技术人员将患者带入治疗机房,并将患者固定在治疗床上,通过手动方式移动治疗床使患者治疗中心与医用直线加速器的等中心重合,医用直线加速器围绕等中心旋转对患者实施放射治疗。该摆位技术需要技术人员反复操作治疗床校准患者身体坐标和直线加速器等中心坐标,耗时费力且摆位精度较差[4-5]。人工摆位技术降低了医用直线加速器的使用效率,特别对于医疗资源相对缺乏的地区,提高医用直线加速器使用效率具有重大意义。同时,在摆位过程中,技术人员手动操作治疗床并通过肉眼观察患者治疗中心与医用直线加速器等中心重合度方式难免会导致较大摆位误差。同时,技术人员需要反复进入治疗机房摆位,难免受到过量的辐照。因此,研发医用直线加速器自动摆位系统具有实际价值。本文简述医用直线加速器自动摆位系统的设计。
1 自动摆位系统结构设计
1.1 总体设计方案
医用直线加速器自动摆位系统的最大特点在于实现放射治疗摆位的自动化和智能化,该自动摆位系统由导轨、运载小车、自动摆位床和移动托架构成。自动摆位床能自动识别照射中心在患者体表的标记,控制系统记录该标记相对于床面的空间坐标,完成标记识别后通过滑动床面将患者拖放到运载小车。运载小车能实现自动升降,并能沿着轨道运动,将治疗患者送入和送出治疗机房。移动托架将患者从运载小车送入直线加速器治疗床实施治疗,并将治疗完成的患者送回运载小车,由运载小车将治疗结束的患者送出机房。直线加速器根据自动摆位床识别的坐标自动与加速器等中心摆位重合,实施精确放射治疗。总体设计方案如图1所示(已获国家发明专利,专利号:ZL201410765031.6)。
1.2 自动摆位床
自动摆位床作为固定患者体位和找到患者放射治疗等中心的装置,主要包括床体、床面、摆位固定装置和激光自动摆位装置。自动摆位床通过激光传感器自动找到患者体表标记的位置,并将该位置所对应的治疗中心作为直线加速器治疗时的照射中心。技术人员协助患者在自动摆位床保持正确的放疗体位,并固定好患者的体位。启动自动摆位按钮,自动摆位床床面向前运动,横断激光不断扫描患者体表,若扫描到体表标记,将通过放射的方式探测到横断位置信号,横断位置信号包括了矢状坐标和横断坐标。此时摆位床停止运动,水平摆位激光上下运动,同样通过反射激光的方式找到治疗中心的水平坐标。激光摆位系统将三个坐标信息送给控制系统,控制系统将这三个坐标所对应的空间一点作为放射治疗的照射中心。若患者为多中心照射,需要再次启动摆位按钮,以同样方式找到其他照射中心。摆位完成后,当运载小车位于床前方规定的位置时,床面将通过摆位床的导轨和小车导轨对接,将患者送上运载小车。
1.3 运载小车
运载小车升降功能由两个电机同步运动实现,电机通过丝杆螺母传动将电机的旋转运动变成直线运动,同时,运载小车通过电机驱动按照预定轨道运动。患者完成自动摆位后,自动摆位床的导轨和运载小车导轨结合,患者和床面一并被运送到运载小车上,小车沿着轨道运动到固定位置并停稳后,触发两个同步电机运动,将患者升到规定的高度。
小车沿着导轨将患者送入机房,待患者进入机房后,将患者运送到直线加速器治疗床旁轨道规定的位置,待小车停稳并固定后,触发移动托架的机械手运动,小车上升到预设高度与机械手自动对接。对治疗完成的患者,机械手将患者从治疗床转移到运载小车,运载小车将患者送出机房,当小车运动到规定位置并停稳后,与自动摆位床轨道对接,将患者从运载小车转移到摆位床。

图1 自动摆位系统总体方案
1.4 轨道
轨道作为运载小车运动导向装置,分为双向轨道,分别作为两辆运载小车进出的通道,轨道的作用主要固定运载小车的运动方向。一条轨道负责运送需要治疗的患者,另一条负责运送治疗完成的患者。根据不同的机房结构,轨道可设计成不同形状。
1.5 移动托架
移动托架包括一对机械手、移动导轨以及置于治疗床和导轨两旁的固定架,机械手可以实现对床面的抓夹功能,并能通过气缸和导轨实现上下和水平方向两个自由度的运动,运载小车1到达规定的位置后,触发机械手动作,机械手先往下运动到规定位置,夹持住摆位床床面,将患者和床面上升到一定高度后,机械手水平移动,将患者和治疗床面放置于直线加速器治疗床上。机械手将患者移开运载小车1后,运载小车1自动通过导轨驶离机房,到达自动摆位床前端,为下一个患者摆位做准备。治疗的患者被送上治疗床后,自动将患者的治疗中心和直线加速器等中心重合,实施放射治疗。当对治疗结束的患者,治疗床水平位置归零,床面后退到机械手抓夹床面的位置,机械手向下运动,自动夹住自动摆位床床面将患者从加速器治疗床上取出,上升到安全高度后,水平运动后向下移动,将患者安全转移到运载小车2上,完成一次治疗。系统运行过程见图2。
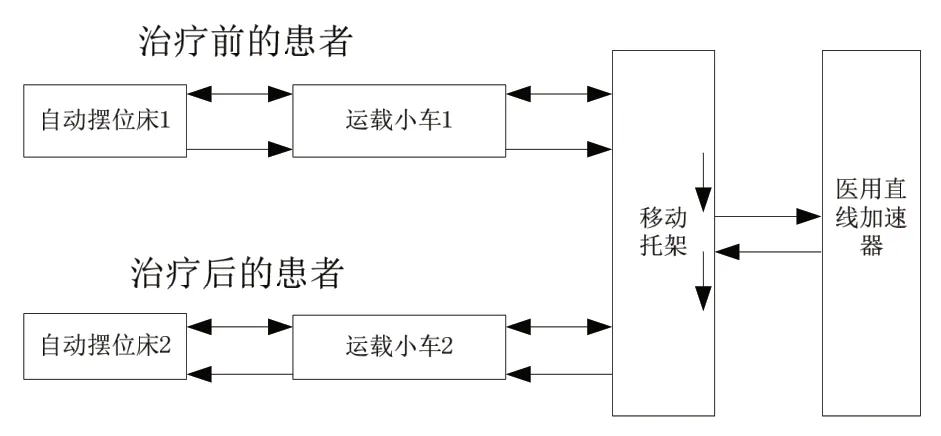
图2 系统运行流程图
2 控制系统设计
本文设计的自动摆位系统处理信号多,并且对安全性、稳定性和实时性的要求较高。为了满足运动控制系统的多信号处理能力、安全稳定性强、实时性高、运算量大的要求,主控芯片应选取高速MCU,使运算和控制速度更快;系统必须具有多个I/O口,以便设计多个输入和输出通道接口便于多路信号处理和系统扩展;为了提高系统稳定性,输出端口应具备短路保护和开路诊断功能;为了实时监控自动摆位系统的工作状态,控制系统还应具备远程通讯和远程故障诊断能力;同时,为了实现与自动摆位系统其他控制子模块的信息交互,控制系统必须集成CAN2.0B总线接口;集成RS232串口通信接口,方便对MCU实施软件升级。根据系统功能要求,设计选取TI公司的F28335DSP作为控制系统的主控芯片,该芯片集成了DSP和微控制器的长处,拥有完成64位的数据处理能力,从而在处理任务时精度更高,同时具有88个通用IO口,能完成多个信号的处理[6]。控制系统原理框图见图3。
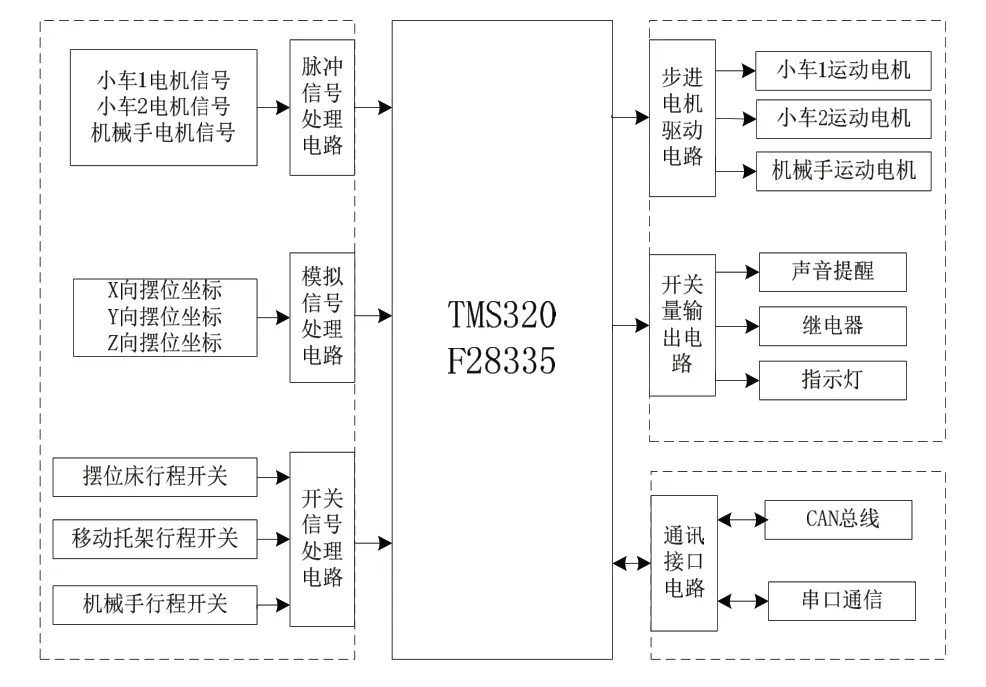
图3 控制系统原理框图
2.1 硬件设计
硬件设计采用模块化设计方法,主要模块有电源模块电路、脉冲信号处理电路、模拟信号处理电路、开关信号处理电路、步进电机驱动电路、开关量输出电路和通讯接口电路。下面对电源模块和通讯模块的设计做简要介绍。
2.1.1 电源模块设计 控制系统采用24 V直流电源供电,而TMS320F28335内核和IO口分别采用1.8 V和3.3 V供电,模拟量输入通道的低通滤波器采用±15 V供电。所以,在电源模块设计时,首先使用LM5010ASDX芯片将直流24 V转换为5 V,MAX743CWE芯片将5 V转换为±15 V,TPS767D318芯片将5 V转换为3.3 V和1.8 V为DSP供电。同时,5 V电源还可作为其他芯片的供电电源。电源模块原理图如图4所示。
2.1.2 通讯模块设计
2.1.2.1 串口模块设计 串口通信模块主要功能为控制器与外部设备间的信息交换,实现控制参数及软件的下载和更新。F28335处理器提供3个串口通信接口,并增加了速率自动检测和FIFO缓冲等新功能。该模块选择MAX3226EAAE作为串口通讯电平转换芯片,其电路原理图如图5。

图4 电源模块电路

图5 串口通讯电路
2.2 软件设计
控制系统软件设计采用模块化设计的思想,将不同的功能划分为不同的控制子模块,根据控制需要调用不同的子程序模块。软件设计的主要思想是对小车的运送流程和机械手动作的运动控制,其软件控制的主流程图如图6所示。

图6 软件控制流程图
软件系统还包括设置软件陷阱、看门狗、多次采样和程序运行状态检测等。只有软件系统的抗干扰能力强,再配合硬件抗干扰设计,达到最大限度降低外界干扰对控制系统的影响,保证系统的正常工作。
3 实验结果与分析
本设计的自动摆位系统的最大优势在于节约摆位时间和提高摆位精度,因此实验内容主要分为自动摆位时间和人工摆位时间的比较,自动摆位精度和人工摆位精度的对比。实验分别对头颈部、胸部、盆腔和乳腺癌术后放疗患者分组进行摆位时间和摆位误差进行统计分析,头颈部肿瘤选择南方较常见的鼻咽癌患者作为实验对象,患者统一采用发泡胶配合头颈部热塑模同时固定的方式;胸部肿瘤选择发病率高的肺癌患者作为实验对象,盆腔肿瘤选择高发的宫颈癌作为实验对象。胸部和盆腔肿瘤患者统一采用体架配合体部热塑模同时固定方式。由于乳腺癌是一种高发的恶性肿瘤,并且固定方式与其他肿瘤不同,需要选择特殊的乳腺托架对患者进行固定,因此将乳腺癌术后患者列入实验对象。对各组分别随机选取20人进行实验,并且每组筛选的患者年龄相差在十岁以内,从而减小因年龄相差太大导致摆位时间差别较大。取其摆位平均时间作为人工摆位时间,每组平均摆位误差作为人工摆位误差。试验现场图见图7。

图7 自动摆位系统试验
摆位技术员为固定的两人协同摆位操作。人工摆位的时间计算从前一个患者结束到下一个患者开始治疗时中间的时间间隔。当医用直线加速器的最后一个射野照射结束,同时加速器停止出束开始计时,计时装置采用秒表。当患者治疗完成,同时直线加速器停止出束作为该患者的人工摆位总时间。自动摆位总时间的计算计时时间同样从前一个患者结束到下一个患者开始治疗时中间的时间间隔作为自动摆位总时间。但由于采用了自动化设备,自动摆位总时间主要由小车的运输时间、机械手的运动时间和患者的放射治疗时间组成。由于运输过程为匀速运动,所以每个患者的自动摆位总时间的差别主要因放射治疗过程中所采用的治疗技术和射野的多少的不同而不同。
摆位精度的实验主要通过图像配准方式比较设计的照射中心与实际的照射中心的位置误差。在具有图像引导的直线加速器进行放射治疗时,为了提高治疗效果,需要通过图像配准方式验证设计的照射中心与实际的照射中心是否重合,本文统计不同部位肿瘤患者的人工摆位误差,再结合自动摆位系统的理论摆位误差进行对比,其实验结果见表1。由于本实验只是记录现有放射治疗过程中的相关参数,并不会对患者任何方面造成影响,所以本文提到的实验没有为患者签署知情同意书。

表1 自动摆位时间和精度与人工摆位时间和精度比较
从实验数据可以得出,医用直线加速器自动摆位系统能显著节约摆位时间并提高摆位精度,从而提高医用直线加速器的使用效率并使患者得到更精确的放射治疗,得到更好的治疗效果。
4 结论
设计的自动摆位系统在理论上能克服患者在接受放射治疗过程中人工摆位所带来的不便,运用自动化技术以提高放射治疗的效率和摆位精度,同时使技术人员不必反复进入机房操作治疗床,既减轻了技术人员的工作量,又避免了技术人员接受到不必要的照射剂量。该自动摆位系统基本适用于所有医用直线加速器,在不改变原直线加速器机房结构的基础上提高放射治疗的效率和摆位精度。
本研究目前还处于设计论证和样机试制阶段,要应用到临床还有很多细节问题需要考虑。例如患者并非刚体,在运输的过程中身体运动会造成照射误差,怎样将运动误差减小。若临床试验满足设计要求,将具有较大的推广价值。