极限工况下漂浮式风电机组塔架的波浪荷载估计
2019-10-31许楠
文 | 许楠
已有研究表明,由波浪导致的浮体运动会增加漂浮式风电机组的塔架荷载。若采用专为固定式基础设计的风电机组,有必要考虑浮体运动对塔架荷载的影响,从而实现风电机组安全性校核。以往对塔架荷载的研究多基于数值模拟结果,风荷载与波浪荷载耦合在一起,不同自由度上的运动影响也耦合在一起。而在实际设计中,浮体设计与塔架设计大多是分开进行的,但考虑到浮体运动会影响塔架荷载,因此,有必要利用浮体运动计算塔架的波浪荷载。
为了提出可靠的波浪荷载解析公式,计算模型的选取十分重要。Takahashi通过在固定式基础模型的底部施加加速度来考虑浮体运动对塔架荷载的影响,但此模型没有得到验证,而且大多数情况下给出的结果并不合理。因此,有必要提出一种等效的模型计算漂浮式风电机组塔架的波浪荷载。本文采用SR(Sway-Rocking)模型分别考虑纵移和纵摇两种相对显著的浮体运动,从而可以应用等效静力荷载方法和模态分析提出塔架波浪荷载的计算解析公式。本文所采用的理论适用于IEC-61400-3中的DLC6.2a,即极限工况下漂浮式风电机组处于停机状态,不考虑风电机组控制系统对塔架荷载的影响。
SR模型
纵移和纵摇是浮体6个自由度运动(如图1)中最为显著的两个,其他方向的运动可以忽略。因此,本研究借鉴地震工程中常用的SR模型(如图2)作为等效计算模型模拟浮体运动对塔架荷载的影响。SR模型可将复杂的锚固体系简化为两个方向的弹簧和阻尼器:纵移用一个横向的弹簧和阻尼器模拟,纵摇用一个转动的弹簧和阻尼器模拟。与地震工程不同的是等效刚度kS、 kR和阻尼cS、 cR需通过FEM分析来获取。
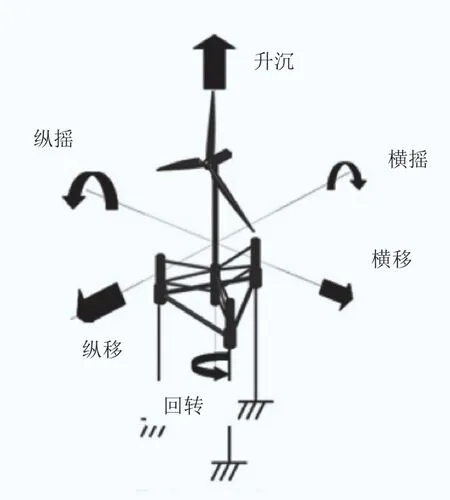
图1 浮体式风电机组体系的运动

图2 SR 模型
等效波浪力
应用SR模型,将浮体和风电机组简化为n个质量节点(如图3),通过模态分析,可以得出浮体运动,即塔架底部的位移[x1]、 速度[v1]和加速度[a1],以此可计算作用于浮体上等效波浪力的公式。
如图3(a)所示,将转动模态锁定,只考虑横向模态,第j 阶模态的运动方程为:
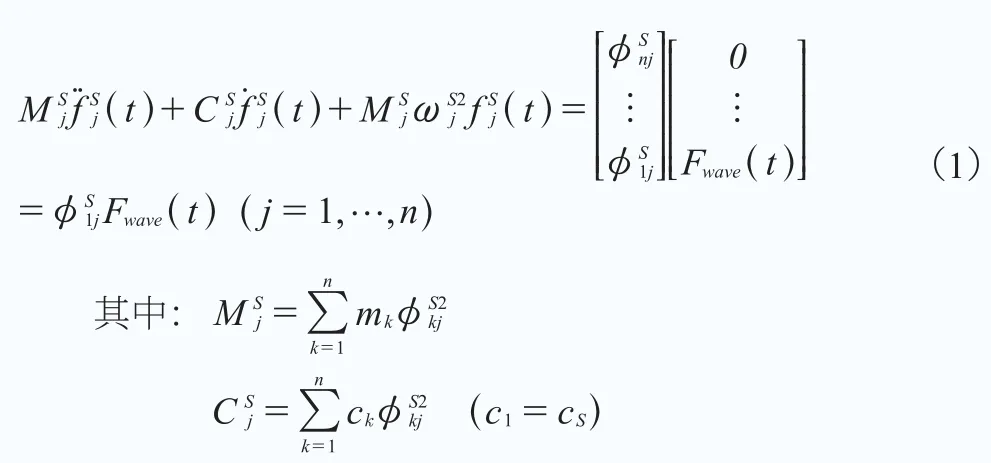
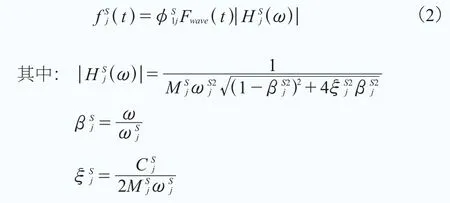
在模态分析中,分别计算不同振动模态下的激励结果,然后进行叠加。这样,由公式(2)就可以得出塔架底部的位移:

因此,横向的等效波浪力就可以表达为:

运用同样的方法,将横向模态锁定,只考虑转动模态,那么如图3(b)所示的转动等效波浪力矩也可以由模态分析得出,表达式如下:


图3 用于模态分析的计算模型
由公式(4)和(5)可知,等效波浪力和波浪力矩可以由塔架底部的位移、阻尼比、波浪频率与结构固有频率的比值以及塔架底部的振型计算得出。获取了等效波浪力和波浪力矩之后,可以得出塔架波浪荷载的计算解析公式。
波浪荷载估计
基于以上讨论,应用SR模型和模态分析能够得出塔架剪力的解析公式。本文采用FEM计算程序和完整的风电机组、浮体及锚固体系模型来验证塔架剪力的解析公式,该程序会考虑风电机组、浮体及锚固体系之间的耦合特性。
一、波浪条件
本研究分别考虑了规则波和不规则波。由于线性Airy波是具有单一周期的规则波,因此,采用Airy波结合模态分析来推导塔架剪力,能更容易解释波浪频率对结构响应的影响。本研究采用的Airy波的极限波高Hextreme=20m,波浪周期变化范围为10~20s,以1s为变化间隔;而在实际环境中,波浪均为不规则波,不规则波以有义波高HS和谱峰周期TP来描述。本研究考虑50年重现期的3小时极限海况。IEC-61400-3中明确指出,在短期的3小时或6小时时间段内,波浪条件可假设为稳定,即有义波高和谱峰周期可假设为不变。因此,本研究采用有义波高为10.75m,谱峰周期变化范围为10~20s,以1s为变化间隔,并采用工程设计常用的JONSWAP谱生成波浪时程。根据Chakrabarti的研究,生成波浪时程时,波浪的峰值因子取3.3;当ω≤2π/TP时,形状因子取0.07,当ω>2π/TP时,形状因子取0.09。这里,ω是波浪的角频率。
二、风电机组、浮体与锚固体系
本文研究波浪荷载的模型时选取半潜式浮体作为基础,锚固体系分别采用张力腿和悬链线两种典型的锚固体系,浮体之上安装NREL 5-MW型号风电机组。风电机组的详细参数参见表1;浮体的详细参数参见表2。对于张力腿锚固体系,考虑到应尽量消减浮体的纵摇效应,3条张力索分别连接浮体的3个角柱,参照图4(a);悬链线锚固体系由3条400m跨度的锚链共同连接在中心柱的底端,相邻锚链水平投影的夹角为120°,其中一条沿入射波的方向伸展,参照图4(b)。

表1 NREL 5-MW风电机组的参数

表2 半潜式浮体的参数

图4 本文研究的锚固体系
三、塔架剪力
对于图3中的横向模态,节点i处的剪力可由塔架底部的响应来计算:

式中,aS(t)是已知的塔架底部横向加速度。如果仅考虑第一阶振型,公式(6)就变为:


图5 应用CQC和SRSS方法的剪力组合比较

式中,aR(t)是已知的塔架底部转动加速度。如果仅考虑第一阶振型,公式(8)中的剪力就变为:

(一)规则波作用下的塔架剪力
对于规则波情况,在公式(7)和(9)中,aS(t)和 aR(t)可以由它们各自的幅值来代替,以计算横向运动和转动运动所引起的塔架剪力幅值。
对于张力腿锚固体系,转动运动对塔架剪力的影响可以忽略不计,因此,塔架剪力可以认为全部由横向运动产生;而对于悬链线锚固体系,横向运动和转动运动对塔架剪力均有显著影响,因此,应将两种运动产生的影响组合起来。由FEM数值模拟可以发现,横向运动和转动运动所产生的最大响应不会同时发生,但它们之间存在一定相关性。参考日本建筑结构荷载规范AIJ (2004)中关于地震荷载的组合方法,本研究采用完全二次方组合法(CQC)。需要注意的是,横向模态和转动模态之间的相关性不会随着外部激励的变化而发生改变,即波浪力仅依赖于系统的阻尼和固有频率。
参考AIJ (2004),还有另外一种横向模态和转动模态之间的组合方法,即平方和开平方根法(SRSS),这种方法认为两个模态之间是不相关的。图5为应用CQC和SRSS方法的剪力组合比较,可以看出SRSS方法低估了塔架剪力;因为横向模态和转动模态较为接近特征值,CQC方法可以给出更为准确的结果。
(二)不规则波作用下的塔架剪力
对于不规则波情况,塔架荷载是随机产生的。因此,本文将采用等效静力荷载法研究荷载的标准差和峰值因子,用它们的乘积与平均荷载的和来计算最大荷载,而浮体运动产生的塔架荷载的平均值近乎为0,可以忽略不计。
与规则波情况类似,在公式(7)和(9)中,aS(t)和 aR(t)可以由它们各自的标准差来代替,以计算横向运动和转动运动所引起的塔架的剪力标准差。对于张力腿锚固体系,塔架剪力标准差可认为全部由横向运动产生;而对于悬链线锚固体系,应将横向运动和转动运动所产生的剪力标准差组合起来,组合方法仍采用CQC方法。
如图6所示为张力腿锚固体系和悬链线锚固体系塔架底部剪力的偏度比较。从图中可以看出,悬链线锚固体系的塔架底部剪力的偏度接近0,意味着塔架底部剪力可假设为高斯过程;而张力腿锚固体系塔架底部剪力的偏度在波浪周期不超过15s时较为明显,应考虑为非高斯过程。为了统一张力腿锚固体系和悬链线锚固体系塔架底部剪力峰值因子的计算公式,本研究采用Kareem提出的非高斯峰值因子计算模型,如公式(10)所示。当偏度α3=0时,公式(10)由非高斯峰值因子变为高斯峰值因子。

图6 张力腿锚固体系和悬链线锚固体系塔架底部剪力的偏度比较

图7 张力腿锚固体系和悬链线锚固体系峰值因子的比较

图7表明,公式(10)可以给出与数值模拟吻合较好的峰值因子结果。对于张力腿锚固体系,有必要采用非高斯峰值因子,而且随着波浪周期的增加,峰值因子呈减小趋势,因为其偏度和向上零穿越概率具有同样的趋势;而对于悬链线锚固体系,高斯峰值因子可以给出较好的结果,并且随波浪周期变化不大。另外,非高斯峰值因子和高斯峰值因子在波浪周期不超过15s时,差异较大。
结论
本文采用SR模型分别考虑纵移和纵摇两种相对显著的浮体运动对塔架荷载的影响,应用等效静力荷载方法和模态分析提出塔架波浪荷载的计算解析公式。在进行模态分析时,横向运动或转动运动所引起的塔架荷载分别采用将另一种模态锁定的方法来获得,然后采用CQC方法进行组合,横向模态和转动模态之间的相关性仅依赖于系统的阻尼和固有频率。对于不规则波情况,在计算塔架底部剪力最大值时,张力腿锚固体系有必要采用非高斯峰值因子,而且随着波浪周期的增加,峰值因子呈减小趋势;而对于悬链线锚固体系,高斯峰值因子可以给出较好的结果,并且随波浪周期变化不大。

摄影:凃汉溪
