圆弧预测变系数显式拦截中制导
2019-10-31周聪闫晓东唐硕
周聪,闫晓东,2,*,唐硕,2
1. 西北工业大学 航天学院,西安 710068
2. 陕西省空天飞行器设计重点实验室,西安 710068
近年来,随着高超声速关键技术的逐渐成熟,世界各国加速推进高超声速武器实战化发展,高超声速武器正逐步从潜在技术转变为现实威胁[1]。其高速机动飞行特性所带来的强大突防能力必将对现有拦截系统造成极大挑战,研究可有效拦截此类目标的先进制导方法迫在眉睫。在传统目标拦截过程中,末制导被认为是整个拦截制导的关键,中制导只需负责将拦截弹引导到导引头开机距离内,满足脱靶量等少量约束即可。由于一般目标轨迹可精确预测,或是飞行速度低、机动能力弱,基于简单预测方法以及比例制导类方法[2-4]可以较为容易的满足大气层内中制导任务要求。但以高超滑翔飞行器为代表的新型临近空间目标,其高机动能力不仅对拦截弹的中制导提出了更高的要求,也使得拦截中制导的作用和重要性大大增加[5]。考虑到其高速、高机动、弹道难以预测的飞行特性,拦截此类目标中制导设计时需要考虑的因素有:① 目标预测,高速目标拦截中制导严重依赖对目标轨迹的精确预测,而目标灵活多变的机动飞行导致对目标轨迹的精确预测十分困难[5];② 终端交会角约束,目标具有较高的速度(通常高于拦截弹速度),在这样情况下减小交会角有利于末段拦截,因此需要对终端交会角进行约束[6];③ 可用气动过载约束,拦截弹所采用的固体火箭发动机一般工作时间较短,在中制导的大部分时间都是依靠气动力控制,然而,在拦截过程中随着高度的增加可用气动过载快速衰减,其结果将是在低空可用过载富余而在高空可用过载不足[7],此种情况要求中制导方法能够合理分配全程过载,有效利用低空的过载能力同时避免高空过载超出限制,即满足可用气动过载约束。此外,为了提高末制导段拦截能力,还希望中制导过程能够尽量减少能量损失,提高终端速度[8]。
目前,专门针对临近空间目标,完全考虑以上拦截要求的中制导研究较少,但对其中一些具体问题已有所研究。此类目标的大气层内拦截中制导本质上是一个预测和多约束问题。约束主要包括终端脱靶量、终端交会角以及作为控制量的可用过载约束。目前,对终端角约束制导方法研究较多,如比例制导[9-10]、滑模[11-12]、最优制导[13-15]均可以很好地实现,但可用过载约束的加入将使问题复杂性大大增加。实际拦截过程中,由于飞行高度和速度的快速变化,可用过载约束值是时变的,而可用过载约束的施加又会影响后续可用过载的约束范围[16],这种控制约束与控制量之间的相互耦合使问题更为棘手。对于包含较多约束的复杂制导问题,最优控制理论是更为有效的工具。文献[17]最早应用最优控制方法研究了气动可用过载约束下制导问题,通过在性能指标中加入与动压相关罚函数实现对可用过载的约束,但需要预先得到自身速度变化剖面以及目标加速度信息;文献[18]研究了平面内终端角约束和终端指令加速度约束下的最优制导问题,解决了施加角约束后末端指令加速度过大问题;文献[16]基于线性化模型,研究了平面内终端角约束和可用气动过载约束下拦截问题,但在实施时需要采用数值积分方法多次迭代和预测未来状态。文献[19]应用模型预测静态规划方法研究了弹道类目标拦截问题,通过将控制约束转化为凸二次规划问题应用内点法求解实现了可用过载约束。不难看出现有方法在处理这类同时含有角约束和可用过载约束制导问题时,一般要结合数值方法,实施复杂,而且多在二维平面内。
显式制导是一种基于当前飞行状态,实时解算出对所要求终端条件的偏差,并以此来生成制导指令的方法,通过应用最优控制理论,可获得某种性能指标下修正终端偏差最优制导律,这种方法最早应用于火箭上升段制导[20]以及着陆制导问题[21]。文献[22]通过在控制量性能指标中加入剩余飞行时间的倒数项,提出了通用显式制导方法,在实现角约束同时避免了终端指令加速度过大问题。虽然没有考虑可用过载约束,但文中结果表明通过构建不同的性能指标可以实现多样的轨迹形式和制导加速度变化规律,显示出了具备控制过载分配能力以及实现可用过载约束潜力。此外,现有的中制导方法[8, 23-24]多假定预测拦截点固定或已知,但在实际中,预测拦截点是很难精确获得的,且对制导性能影响很大。传统目标拦截时一般采用目标匀速直线飞行的假设[2, 4]估计拦截点,其实质为将目标轨迹假定为直线,以当前速度沿直线递推,显然不适用于机动目标。机动目标的轨迹跟踪和预测方法[25-28]虽然已经有所研究,但由于计算量大、时间长,很难应用于中制导方法。对于制导方法来说,随着剩余飞行时间减少,预估拦截点将逐步收敛到实际拦截点,因此单一时刻预测精度并不是唯一且必须达到的要求,预测方法的稳定性和快速性是同为重要的指标。
考虑到以上问题和需求,本文首先针对临近空间目标滑翔段飞行特性,提出了基于圆弧的几何目标预测方法,其将目标机动轨迹近似为圆弧,依据圆弧递推拦截点状态,应用此方法,基于目标的位置和速度信息即可对机动目标状态进行快速预测。然后基于显式制导原理,通过在性能指标中构建动压权重函数,以飞行动压近似可用过载变化,设计了变系数显式制导律。相比通用显式制导[22],本文提出的方法满足可用过载约束的同时还可有效提升拦截速度。最后,结合圆弧预测和变系数显式制导,推导了机动目标拦截中制导方法,仿真结果表明了本文方法的有效性。
1 问题描述与分析
1.1 拦截弹模型
由于一般拦截弹固体发动机的工作时间很短,因此假定在进入中制导阶段时拦截弹发动机已经关机,在地面发射坐标系下建立三维拦截弹质点动力学方程:
(1)
(2)
(3)

(4)
(5)
(6)
式中:VM为速度;γM为弹道倾角;ψM为速度航向角;m为拦截弹质量;g为重力加速度;xM、yM、zM为拦截弹在地面发射系下位置;Fx、Fy和Fz分别为拦截弹的阻力、升力和侧向力,其定义为
Fx=qSCx(Ma,α,β)
(7)
Fy=qSCy(Ma,α)
(8)
Fz=qSCz(Ma,β)
(9)
其中:q为动压;S为参考面积;Ma为马赫数;Cx、Cy、Cz分别表示导弹的阻力、升力和侧向力系数;α、β为导弹的攻角和侧滑角,在制导过程中,导弹的纵向和侧向制导加速度是由升力和侧向力提供的,即
Fy=may
(10)
Fz=maz
(11)
同时其可提供的制导加速度大小受最大攻角和侧滑角限制:
(12)
式中:Cymax、Czmax表示最大攻角和最大侧滑角下的升力和侧向力系数,其与马赫数有关,需要注意的是约束式是时变且与飞行状态相关的。
1.2 拦截中制导问题
中制导要求为末制导提供良好的初始条件,满足中末制导交班要求。对于高速机动目标拦截,其终端约束为脱靶量和交会角。定义交会角为拦截弹速度矢量与目标速度矢量夹角的补角[6],对于三维拦截,可以将其分解到纵向和侧向平面:
φy=π-(γM-γT)
(13)
φz=π-(ψM-ψT)
(14)
式中:γM、ψM分别为拦截弹的弹道倾角和速度航向角;γT、ψT为目标的弹道倾角和速度航向角。对于小速度比拦截,愈小的交会角愈有利于末制导拦截[6],因此,需要对终端交会角进行约束:
(15)
同时脱靶量约束为
(16)
因此,本文的拦截中制导设计要求为:给出合理的控制序列a=[ay,az],使其满足控制约束式(12)以及终端约束式(15)和式(16),同时尽可能地增大终端速度。
2 基于空间圆弧的轨迹预测
高超声速滑翔飞行器一般在纵向保持准平衡滑翔状态,而在侧向通过调整倾侧角,控制升力方向的方式进行机动和制导飞行。尽管这类飞行器机动模式多样[29-30],但在滑翔段机动飞行中,为了维持准平衡滑翔条件以及满足制导控制系统的限制,攻角、倾侧角的调整并不频繁[25, 31],可以在某一较短的拦截时间内认为是常值。此时,滑翔飞行器弹道倾角较小,在速度法向只存在重力和气动升力,在两者合力作用下飞行器的实际轨迹为一近似的空间圆弧,其圆弧半径为
(17)
式中:L和G分别为目标的升力和重力;σ为其倾侧角;mT为目标质量。因此,在对高速滑翔类目标进行轨迹预测时,采用基准圆弧轨迹方式比一般按当前速度直线递推[4]的方法在理论上更适用。
2.1 空间圆弧方程
空间圆弧方程可以采用直角坐标也可以采用极坐标的方式,本文采用直角坐标的方式。对于空间圆弧,可以认为是一球面与通过此球面的平面相交产生,球面方程可以由球心坐标(x0,y0,z0)和球面半径(R0) 4个参数定义:
(18)
空间平面方程为
Ax+By+Cz+D=0
(19)
式中:(A,B,C)为其平面的法向量坐标,由于D可以通过将球面方程中的球心坐标代入求得,因此其实质的参数只有3个,所以空间圆弧方程为
(20)
由式(20)可知,空间圆弧总共需要以下7个特征参数:(x0,y0,z0,R0,A,B,C),才能唯一确定。
2.2 圆弧轨迹确定方法
对于空间圆弧来说,通过3个轨迹点可以确定其参数,如图1所示假设在进行中制导轨迹预测时,以当前时刻(tk)按间隔时间Δt分别向后递推取3个轨迹点:P(tk)、P(tk-1)、P(tk-2),其在地面系下的位置坐标为
(21)
图1 圆弧轨迹预测
首先通过轨迹点P1、P2、P3坐标可得到圆弧所在平面方程为
(22)
其对应于空间平面方程(19)的系数为
(23)
同时由空间球面方程(18)可得
(24)
(25)
(26)
联立以上3个方程,可消去R0,得到关于圆心坐标的方程为
A2x+B2y+C2z+D2=0
(27)
A3x+B3y+C3z+D3=0
(28)
式中:
联立式(19)、式(27)和式(28)获得关于圆心坐标的线性代数方程组为
(29)
求解式(29)得圆心坐标为
(30)
圆弧半径为
(31)
至此,可获得确定圆弧轨迹的7个特征参数。
2.3 预测拦截点状态估计
一般临近空间目标在滑翔段速度衰减较慢,在预测拦截点估计时可假定目标保持当前速度VT飞行,则如图1所示经过剩余飞行时间T后目标轨迹转过的圆心角为
(32)
圆弧平面单位法向量为
(33)
预测点的坐标XT′可以通过将目标当前位置XT沿圆心O,以空间向量n旋转ϑ角度得到(如图1所示)
XT′=XT+R(n,ϑ)(XT-XO)
(34)
式中:R(n,ϑ)表示沿任意空间方向向量n、旋转ϑ角度的转换矩阵,定义为

(35)
式中:nx、ny、nz为空间法向量n的分量,由此可计算得到给定剩余飞行时间T下的预测拦截点位置。
为了对终端交会角约束,需要预测目标在拦截点处的弹道倾角和速度航向角,基于圆弧轨迹的假设,可以方便地进行估算:
首先如图1所示,在预测拦截点T′处的目标速度方向向量可表示为
VT′=OT′×n
(36)
因此,速度方向向量分量为
VT′=[VT′x,VT′y,VT′z]T
(37)
则目标终端的弹道倾角和速度航向角为
(38)
(39)
3 变系数显式制导
本节首先在匀速假设下推导了三维终端角约束显式制导律,然后在性能指标中构建动压权重函数,设计了制导增益自适应更新的显式制导方法,实现了可用过载约束。
3.1 三维角约束显式制导
拦截弹在惯性系中的运动可描述为
(40)
式中:yM为拦截弹在惯性系中的位移矢量;aM为对应的制导加速度矢量,制导律需要满足终端状态约束:
(41)
即同时满足终端位置和速度约束,定义新的状态量和控制量为
(42)
(43)
u=aM
(44)
对式(42)和式(43)分别求导可得
(45)
(46)
所以构成线性动态系统:
(47)
式中:
(48)
为了实现式(41)所示的终端约束,需令
X1(tf)=X2(tf)=0
(49)
考虑二次型性能指标:
(50)
式中:n可取大于等于0的任意整数,如式(50)的性能指标可保证当剩余飞行时间T趋近于0时制导加速度愈小,且随着n的增大而使这种效果更明显。一般的,n=0 仅表示控制消耗最省的性能指标。
对于如式(47)、式(49)、式(50)定义线性最优控制问题,可以应用最优控制理论得到确定解析解[22],从文章完备性考虑给出简要推导过程。
定义哈密顿函数
H=L+λ(AX+bu)
(51)
式中:λ=[λ1,λ2]为协态向量,由最优性条件:
(52)
同时
(53)
所以原问题的最优解为
u*=-λbTn
(54)
为了求解协态向量λ,定义基础求解矩阵M,其满足:
(55)
对照式(52)和式(55),作为通解形式协态向量应满足:
λ=cM
(56)
式中:c为常向量。采用如下方法求解M矩阵,令
(57)
当T=0时有X=0,对式(57)积分,可得

(58)
(59)
MX=QcT
(60)
cT=Q-1MX
(61)
将式(61)和式(56)代入式(54)整理可得最优解为
u*=-(Mb)TQ-1MXTn
(62)
基于以上推导求解原问题,将式(48)代入式(58),此时M=I,可得
(63)
所以
(64)
根据式(62)原问题以式(50)为性能指标的最优制导指令为
u*=-(Mb)TQ-1MXTn=

(65)
将式(42)~式(44)代入式(65),整理可得
(66)
式中:
K1=(n+2)(n+3),K2=(n+2)(n+1)
(67)
假定拦截弹采用常值速度飞行,则有
(68)
(69)
(70)

(71)
采用近似R=VT:
(72)
对于采用气动力控制的拦截弹,加速度制导指令只能施加在速度法方向,因此将式(72)分解到弹道系的OYv,OZv方向:
(73)
(74)


(75)

(76)

(77)
(78)

(79)
(80)
以上推导没有考虑重力影响,为了提高制导精度,实际实施时可在纵向制导指令式(79)中加入重力补偿项,有

gcosγ
(81)
式(80)和式(81)的制导指令中包含纵侧向耦合项,一般中制导过程中实际速度方向偏离视线以及要求的终端角方向并不显著,此时可假定qε-γ≈0,qβ-ψ≈0及γf-γ≈0,ψf-ψ≈0,同时临近空间目标在滑翔段具有较小的弹道倾角,可取qε≈γf≈0,此时,制导指令式(80)和式(81)可简化为
(82)
在中制导拦截飞行中,拦截弹控制系统通过跟踪该制导指令实现对目标的拦截。
3.2 制导增益自适应更新设计
为了实现可用过载约束,在式(50)所示性能指标中加入权重函数g(T):
(83)
式中:权重函数设置为可提供的最大加速度,即根据可提供控制能力进行控制量的分配,进而实现间接的控制约束:
g(T)=umax
(84)
类似的,采用如式(51)~式(62)推导过程可得到对应最优制导指令:
u*=-(Mb)TQ-1MXg(T)
(85)
式中:
(86)
气动力所能提供的最大可用加速度为
umax=qSCmax
(87)
式中:Cmax为最大攻角下的升力系数或最大侧滑角下的侧向力系数,由于在高马赫数下变化不显著,因此可近似为常值。
对于权重函数(84),可写为与终端量的相对比值形式,消去参考面积和常值气动系数项,此时
(88)
式中:q(T)为当前时刻动压;qf为飞行终端时刻动压。由于是显式制导,在实施过程中需要预先得到拦截全程性能指标权重g(T)即飞行动压相对变化,采用如下方法对其进行近似预测。
首先应用指数形式的大气密度拟合公式:
ρ=ρ0e-h/hs
(89)
式中:ρ0为基准大气密度;hs为拟合常数;h为飞行高度;将式(89)代入式(88),即
(90)
式中:h(T)和hf分别为当前和终端高度;V(T)和Vf为当前和终端速度。可以看到动压权重式(90)与速度的平方项和高度的指数项有关,考虑到高度变化对其的影响要比速度变化显著的多,且拦截弹速度变化局限在前期较短时间内,在这里应用等速假设消去速度项,则
(91)
由于在中制导过程中实际轨迹偏离视线并不显著,且制导律式(82)的收敛特性可保证飞行轨迹逐渐收敛到视线方向,此时高度变化可近似为
hf-h(T)=VTsinqs
(92)
式中:V、qs、T分别为当前时刻下的速度、视线高低角和剩余飞行时间。将式(92)代入式(91),同时令
(93)
此时,权重函数可写为
g(T)=ecT
(94)
将式(94)代入式(86)积分可得
(95)
将式(94)和式(95)代入式(85),即可得到变系数显式制导律,其与式(82)形式一致,只改变了制导增益:
(96)
可以看到制导增益K1、K2是随剩余飞行时间T和参数c变化的,因此需要估算剩余飞行时间(估算方法第4节给出),并按式(93)计算参数c,最后应用式(96)即可得到当前制导周期内更新的制导增益。
4 圆弧预测变系数显式拦截中制导
本节结合圆弧预测和变系数显式制导,通过圆弧预测方法估计拦截点目标状态,应用变系数显式制导方法实施对临近空间机动目标的拦截。
4.1 拦截点目标状态与剩余飞行时间估计
拦截中制导实施过程中的几何关系如图2所示,M、P分别为导弹和目标位置;T′为预测拦截点位置;MT′为导弹位置相对预测拦截点T′的视线;qb和qs为导弹对应预测拦截点的视线方位角和高低角,通过预测拦截点和导弹位置可以计算得到。

图2 拦截中制导实施过程中几何关系示意图
由前所述,临近空间目标飞行轨迹可近似为一段空间圆弧,此时基于2.2节圆弧确定方法,根据若干间隔时刻目标点位置可确定对应圆弧特征参数。然后在剩余飞行时间T时的预测拦截点位置可由式(34)计算得到:

(97)
假定拦截弹以速度VM沿直线飞行,则有
|MT′|=VMT
(98)
式中:|MT′|为拦截弹当前位置到预测拦截点T′ 距离,有
|MT′|=
(99)
将预测拦截点位置式(97)代入式(99)同时联立式(98)即可得到关于剩余飞行时间的方程,此方程为超越方程,可采用数值方法求解。
求得剩余飞行时间后,应用式(32)~式(38)即可估计拦截点位置以及目标的速度倾角和速度航向角。以上在进行拦截点目标状态估计时,需要的测量信息为目标当前时刻位置,当前时刻速度大小以及两个历史时刻位置。
4.2 圆弧预测拦截中制导的实现
应用变系数显式制导方法对4.1节估计得到的预测拦截点进行拦截时,首先根据预测拦截点位置T′计算预测拦截点视线角qs,然后结合导弹当前速度VM计算显式制导增益式(96),接着应用变系数显式制导方法得到制导指令式(82),整个制导方法的实施流程如图3所示。
如图2所示,若对导弹不施加制导,忽略重力和阻力影响,导弹将按当前速度飞行,以此预估拦截时刻零控导弹位置M′,有
|MM′|=VMT
(100)
零控导弹位置与预测拦截点之间的位移M′T′即为零控脱靶量,中制导要保证终端时刻零控脱靶量为零,此时等价于:
γ(tf)=qs(tf),ψ(tf)=qb(tf)
(101)
即导弹速度方向与预测拦截点视线方向一致,同时满足终端角约束:
γ(tf)=γf,ψ(tf)=ψf
(102)
结合以上分析,制导律式(82)的本质即为调整导弹速度方向使其与预测拦截点视线方向一致,同时达到指定终端角方向。
需要注意的是以上在推导显式制导以及剩余飞行时间估计时采用了目标和拦截弹匀速飞行的假设。实际中,目标在滑翔段飞行时速度衰减缓慢,较为符合这样的假设。拦截弹虽然有一定的速度变化,但主要发生在前期,随着高度增加,阻力下降,其逐渐将接近常值,而且在制导过程中是不断更新的,因此可以满足制导需要。
5 数值仿真与分析
本节将通过数值仿真验证本文制导律的实际效果,在实施时分为两部分:首先针对固定拦截点进行打击,验证变系数显式制导处理终端角约束以及可用过载约束的能力,同时与常系数下的显式制导进行了对比;然后以做侧向机动的CAV-H飞行器作为目标,验证本文制导方法进行轨迹预测以及对机动目标的拦截能力,同时与一种预测比例制导方法进行了对比;最后考虑测量偏差和气动参数不确定性影响,进行蒙特卡罗打靶验证本文方法在随机偏差条件下的制导性能。在仿真时,机动过载约束不是定值,通过约束攻角和侧滑角α、β∈[-15°,15°]得到,制导指令对应的攻角和侧滑角通过气动力系数反插值得到。
5.1 针对固定点拦截仿真结果
初始时刻导弹位置为(0, 15, 0) km,速度为2 000 m/s,飞行高度15 km,弹道倾角15°,速度方位角0°。选定的拦截点位置为(70, 35, 4) km,速度倾角和航向角约束分别为0°和8°,飞行全程无动力。分别在常系数和变系数下应用本文制导律式(82)进行拦截,其中常系数按式(67)计算,采用控制量最省的性能指标,因此取n=0。针对固定点拦截的仿真结果如表1、图4~图7所示。
图4给出了变系数显式制导性能指标权重预测值和实际值对比。可以看出,采用式(94)所示的简化预测方法虽然在初期有一定偏差,但可以很快地收敛于实际值,证明用于简化的假设是合理的。
由表1和图5可以看到,变系数显式制导具有较小脱靶量,同时终端角以很高的精度满足了约束要求。而常系数显式制导不仅没有实现终端角约束,而且产生了较大的脱靶量。主要原因可以从图6分析得到:拦截飞行后半段制导需用加速度超过气动力所能提供的最大法向加速度,加速度饱和导致无法实现期望制导效果。而变系数显式制导需用加速度全程调节在可用加速度边界内,保证了终端脱靶量和角约束实现。这种需用加速度合理分配是通过制导增益的自适应调节来实现的。如图7(c)所示,变系数显式制导初期有较大的增益,而在制导过程中逐渐减小,最后与常系数显式制导趋于一致。这样的变化充分利用飞行初期富余的过载能力,而在后期飞行高度增加可用过载减小后降低了需用过载要求。结果表明变系数显式制导能够根据飞行全程可用过载的变化合理分配需用过载,满足可用过载约束,继而保证终端脱靶量和角约束的实现。

表1 固定点拦截仿真结果
图4 变系数显式制导性能指标权重预测
图5 针对固定点拦截轨迹
图6 固定点拦截加速度变化
可用过载约束的实现同时导致了飞行轨迹的差异,如图5(b)所示,变系数显式制导轨迹相比常系数在前期机动绕飞更多航程,而在后段保持平直飞行和较小曲率,这样的轨迹形式降低了拦截末端需用过载要求,表明这种方法已经具备一定的轨迹规划能力。
图7 固定点拦截仿真结果
同时由图7(d)可以看出,变系数显式制导相比常系数具有更高的终端速度,主要原因是,一般显式制导所采用的如式(50)所示性能指标表示制导加速度最省,对于气动力拦截弹,制导加速度是由升力提供的,而终端速度是与阻力直接相关的;在一般问题中,由于认为愈小的气动升力下诱导阻力愈小,这样的性能指标近似等价于最大化终端速度;但是这个准则在大空域拦截,高度和动压大幅变化的场景下并不完全适用。因为对于相同的制导加速度指令,动压不同,攻角则不同,进而导致诱导阻力有差别。显然随着动压增大,所需攻角减小可以使对应的诱导阻力降低。本文在原有性能指标中引入如式(94)所示动压权重,更能匹配这种变化,继而减小诱导阻力,提升终端速度。
以上结果和分析表明,基于动压权重自适应更新的变系数显式制导方法可行,相比一般常系数显式制导,其不仅满足了可用过载约束,保证了终端脱靶量和角约束的实现,还有效提升了终端速度。
5.2 针对机动目标拦截仿真结果
选择CAV-H飞行器作为目标,其初始时刻位置为(200, 35, 0) km,飞行高度为35 km,飞行速度为3 500 m/s,速度倾角和航向角为0°。在拦截过程中,CAV-H以恒定的攻角和倾侧角(α=10°,σ= 40°)进行侧向机动,模拟一般滑翔飞行器在滑翔段的飞行方式。同时假定目标的位置和速度信息可以测量得到,圆弧预测时两个历史时刻位置间隔时间选为 5 s,中制导初始状态选择发动机关机时刻飞行状态。导弹在距目标15 km 时中末制导交班,中制导结束。由于本文没有考虑末制导段,中制导结束后的制导指令保持最后时刻的值,终端交会角约束为0°,其他初始状态和仿真条件沿用5.1节中的设置。
分别应用圆弧预测变系数显式制导方法(本文制导方法)和预测比例制导[4]按上述条件进行仿真,其中预测比例制导采用以目标当前速度沿直线递推的方法估计拦截点,同时应用比例制导打击拦截点。仿真结果如表2和图8所示,可以看出:由于未加入末制导段修正,本文制导方法脱靶量和终端交会角没有完全收敛到0,然而其精度足以满足中末制导交班要求;而预测比例制导出现了较大的零控脱靶量(4 262.19 m)和交会角(11.464 1°)偏差。导致这种差异的原因可结合仿真结果图9和图10进行分析。
表2 机动目标拦截结果
图8 针对机动目标拦截轨迹
首先是本文制导所采用的圆弧预测方法相比预测比例制导以当前速度沿直线递推的方法[4]显著提升了预测精度。图9(a)和图9(c)给出了两种方法的预测效果对比,可以看到本文制导方法一开始就达到了较高的精度,收敛到实际值附近,尤其在纵向和侧向;而预测比例制导方法在初期出现了较大的偏差,虽然随着剩余飞行时间的减少在拦截末端可以收敛到实际值,但在这个过程中将导致预测拦截点大幅变化,使制导方法无法在初期过载能力充足情况下提前应对目标机动和修正零控脱靶量。由图9(b)和图9(c)可以看出,在进行剩余飞行时间和预测拦截点目标位置估计时,两种预测方式结果相近,其在初期均有一定的偏差,随后逐渐收敛到真实值,这种偏差主要是没有考虑拦截弹速度变化引起的,由于飞行初期大气稠密,拦截弹速度将快速衰减,而以当前速度进行估计时将使剩余飞行时间小于实际值,并使预测拦截点航向位移大于实际值。随着高度增加阻力减小,拦截弹速度变化趋于稳定,剩余飞行时间和预测拦截点目标位置估计值也将趋于实际值,仿真结果表明可以满足制导需要。
图9(d)给出了采用本文制导方法得到的目标终端弹道倾角和速度航向角估计值与实际值对比,可以看到其精度很高,估计偏差小于0.5°,而且到拦截时刻将完全与实际值一致,结果表明估计方法可行,可以满足交会角约束的需要。
以上结果和分析表明,本文制导所采用的圆弧预测相比一般按当前速度直线递推的方法,更符合临近空间目标机动特性,显著提升了预测精度,不仅能实现预测拦截点位置的估计,还能进行目标终端速度倾角和航向角的预测,保证了中制导顺利实施。
其次,如前所述,所应用的变系数显式制导方法具有可用过载约束能力,其在一定程度上能根据拦截全程最大可用过载变化合理分配制导加速度,避免制导加速度饱和;而不具备这种能力的比例制导,随着拦截弹飞行高度增加,很快出现了制导加速度饱和现象(如图10所示)。在这种条件下导弹只能以最大攻角和侧滑角飞行(如图11(a)所示),由于实际加速度仍无法达到制导需用加速度要求,导致纵向和侧向出现较大零控脱靶量,同时未能实现交会角约束。
图9 目标状态预测结果
图10 机动目标拦截加速度变化
综上表明,本文提出的结合圆弧预测和变系数显式制导对临近空间目标实施拦截中制导的方法可行,其目标预测精度的提升和可用过载约束的实现保证了最终制导效果,满足了终端零控脱靶量和交会角约束的要求,实现了对临近空间机动目标的有效拦截。
5.3 随机偏差条件下拦截仿真结果
5.1节和5.2节均是在假定目标信息可精确获得条件下的仿真,在实际中,雷达测量和跟踪得到的目标位置和速度信息不可避免存在误差,同时,所使用的气动参数也存在不确定性。在5.2节仿真条件基础上,加入测量信息和气动参数偏差进行蒙特卡罗打靶仿真。其中,考虑目标位置和速度在地面坐标系下的3轴分量(x,y,z)以及(Vx,Vy,Vz)分别含有一倍标准差为 50 m 和 30 m/s的测量偏差[32],拦截弹的阻力系数、升力系数以及侧向力系数按3倍标准差为15%的偏差限摄动,仿真次数500,打靶统计结果如表3以及图12和图13所示。
可以看到,加入随机偏差后,预测比例制导的零控脱靶量和交会角均出现了非常大的散布,其主要是引入的速度测量偏差使目标速度方向计算值发生改变,沿目标当前速度方向直线递推拦截点的预测方式会将这种速度方向偏差显著放大,导致预测拦截点的大幅变化和零控脱靶量的大范围散布。本文制导方法得到的零控脱靶量相比无测量偏差条件下也有所增大,其主要是由于位置偏差导致预测拦截点变化引起的,然而,最终零控脱靶量散布期望与位置偏差基本处于同一水平,远远小于预测比例制导结果。考虑到未加入末制导段修正,这样的精度仍然能够满足中末制导交班要求。结果表明,在测量信息和气动参数存在随机偏差条件下,本文制导方法依然能够保持较好的预测和制导性能,且零控脱靶量和交会角可以满足中末制导交班要求。

表3 蒙特卡罗仿真统计结果
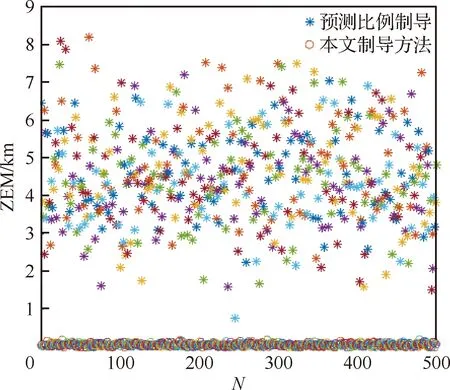
图12 零控脱靶量分布图

图13 交会角分布图
6 结 论
1) 圆弧预测方法可以实现对侧向机动目标预测拦截点位置和速度角的有效预测,预测精度能够满足中制导需求。
2) 基于动压权重自适应更新的变系数显式制导方法不仅可以满足终端角和可用过载约束,还可以提高导弹终端速度,增强拦截能力。
3) 结合圆弧预测和变系数显式制导方法,可以满足临近空间目标拦截中制导预测和多约束的要求,实现对机动目标的有效拦截。
4) 测量不准确和气动参数不确定条件下,本文方法依然能够保持较好的预测和制导性能,满足中末制导交班要求。