机器人航天员精细操作方法及在轨验证
2019-10-31李志奇刘伊威于程隆金明河倪风雷
李志奇,刘伊威,于程隆,金明河,倪风雷,刘 宏
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080)
1 引言
空间机器人在过去三十几年里得到了迅速的发展,针对空间站应用的大型机械臂如加拿大航天飞机机械臂[1-3]、国际空间站机械臂[4-6]、日本JEMRMS[7](Japanese Experiment Module Remote Manipulator System)及ERA机械臂[8](European Robotic Arm)等,其他空间机械臂还有美国轨道快车机械臂[9]、ETS-VII机械臂[10](Engineering Test Satellite-VII)、德国的 ROTEX项目[11]和 ROKVISS[12]等。
面向更广泛、更精细的操作任务和更多样化的应用环境,美国、德国以及意大利等开展了机器人航天员的研究,以代替或协助人类航天员完成空间操作任务。德国宇航中心提出了机器人航天员的概念[13],在移动卫星上安装2个轻型机器人手臂、2个多指灵巧手及2台立体摄像机,并基于该概念研制了机器人手臂和多指灵巧手[14]。NASA推出具有仿人型的机器人航天员Robonaut1[15-16],典型应用背景是国际空间站的舱外作业(Extravehicular Activity,EVA)。它不需任何特殊的环境设施,能够使用大部分的舱外作业工具,并可以和航天员协同工作。美国的机器人航天员Robonaut2已于2011年3月发射至国际空间站执行任务。
自上世纪90年代,我国就开始稳步推进空间站工程。中国空间站远程机械臂系统CSSRMS(Chinese Space Station Remote Manipulator System)项目处在研制阶段[17]。鉴于空间站及空间任务的复杂性要求,迫切需要开展机器人航天员在轨试验,为今后空间站的建造和维护奠定技术基础。
本文提出一种机器人航天员的臂手系统方案,包括7自由度机械臂、5指仿人灵巧手、手眼相机和全局相机、在轨人机接口等模块,以期在空间微重力环境下与航天员配合完成多种演示验证任务,对空间机器人关键技术以及在轨人机协同关键技术进行验证和评价,为空间机器人辅助或配合航天员开展在轨维修积累经验和数据。
2 系统方案
2.1 总体方案
机器人航天员系统划分为6个相对独立部分,如图1所示。本体系统(1~4层)为现场机器人航天员,包括自身的硬件本体及底层控制;基于触觉和视觉的遥操作人机界面系统(5~6层)为临场感操作端及机器人顶层的任务规划。分层的系统结构,使得复杂系统的设计和实现变得容易并提高了可操作性,任务的分配更加明确。
机器人航天员由2个7自由度的轻型柔性臂、2个15自由度的多指灵巧手、包含3个自由度颈部的头部、2个自由度的腰部、双目视觉及控制器等构成。其本体共有49个自由度,具有位置、力、关节力矩、视觉等多种传感器。具有多种感知能力,可实现机器人航天员的自主柔顺操作、航天员在轨或地面遥操作等控制。机器人航天员三维模型如图2所示。为在地面条件下实现移动,增大操作范围,将机器人航天员安置在一个移动平台上。
2.2 机械臂
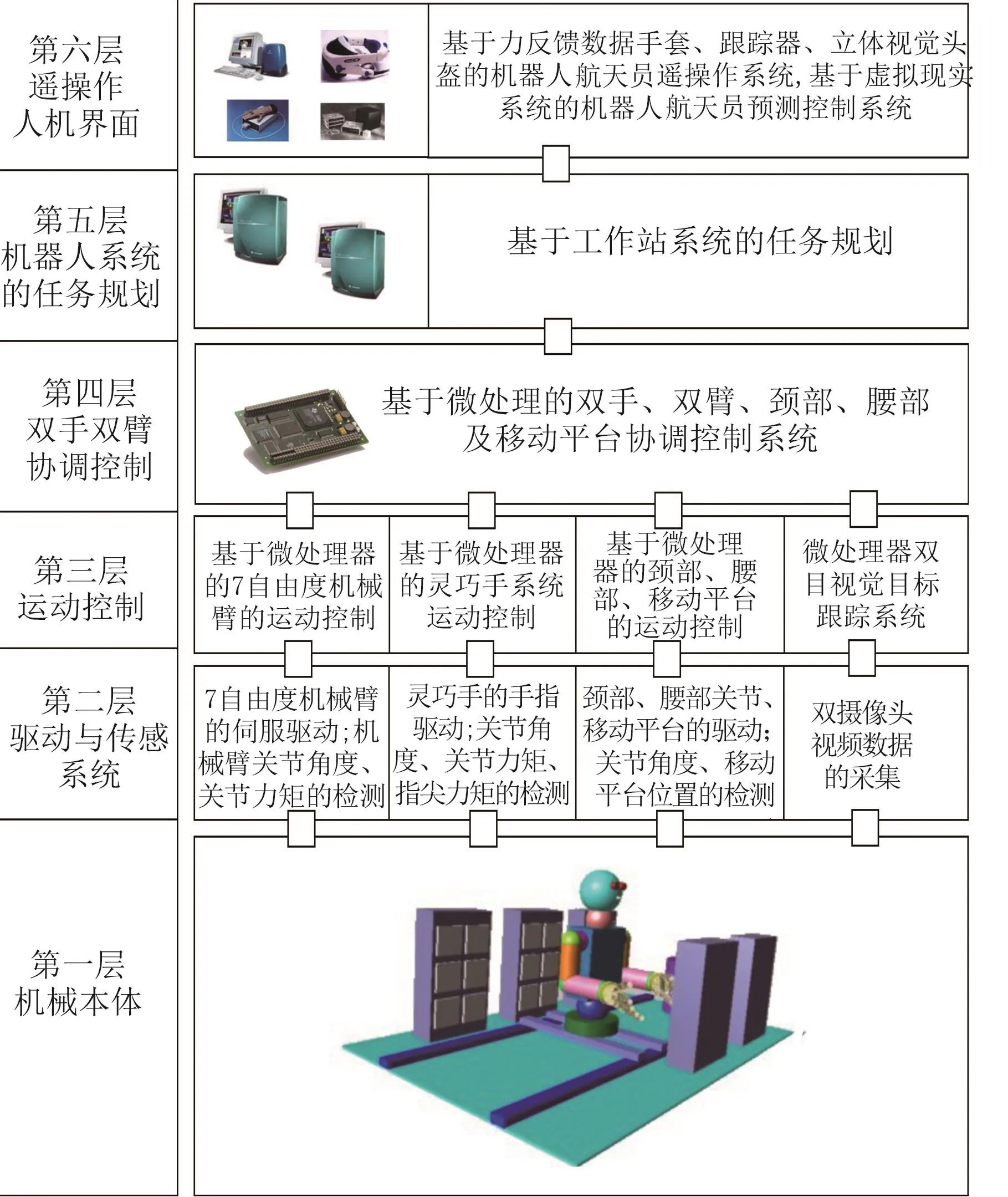
图1 机器人航天员6层结构模型Fig.1 Six layer structure of robot astronaut
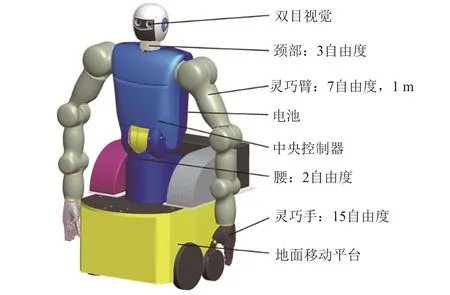
图2 机器人航天员模型Fig.2 The model of robot astronaut
机器人航天员手臂如图3所示,采用7自由度构型,具有重量轻、负载能力大、感知能力强等优点。采用模块化设计,由2个模块化的肩部关节、3个模块化的肘部关节、2个模块化的腕关节构成。多个连接件将7个模块化关节连接,构成手臂。
模块化的肩、肘、腕关节具有相近的结构,根据关节力量需求,在电机和谐波减速器的选型上有所区别,传感器配置及关节电气系统是相同的。关节配置如图4所示。采用直流无刷电机、谐波减速器的驱动和传动方案。为便于走线、扩大关节的活动范围,采用大中心孔结构。电机的转子通过连接轴带动谐波减速器的波发生器高速转动,电机定子和谐波减速器的钢轮与关节基座固定,柔轮通过关节力矩传感器带动关节输出端转动。
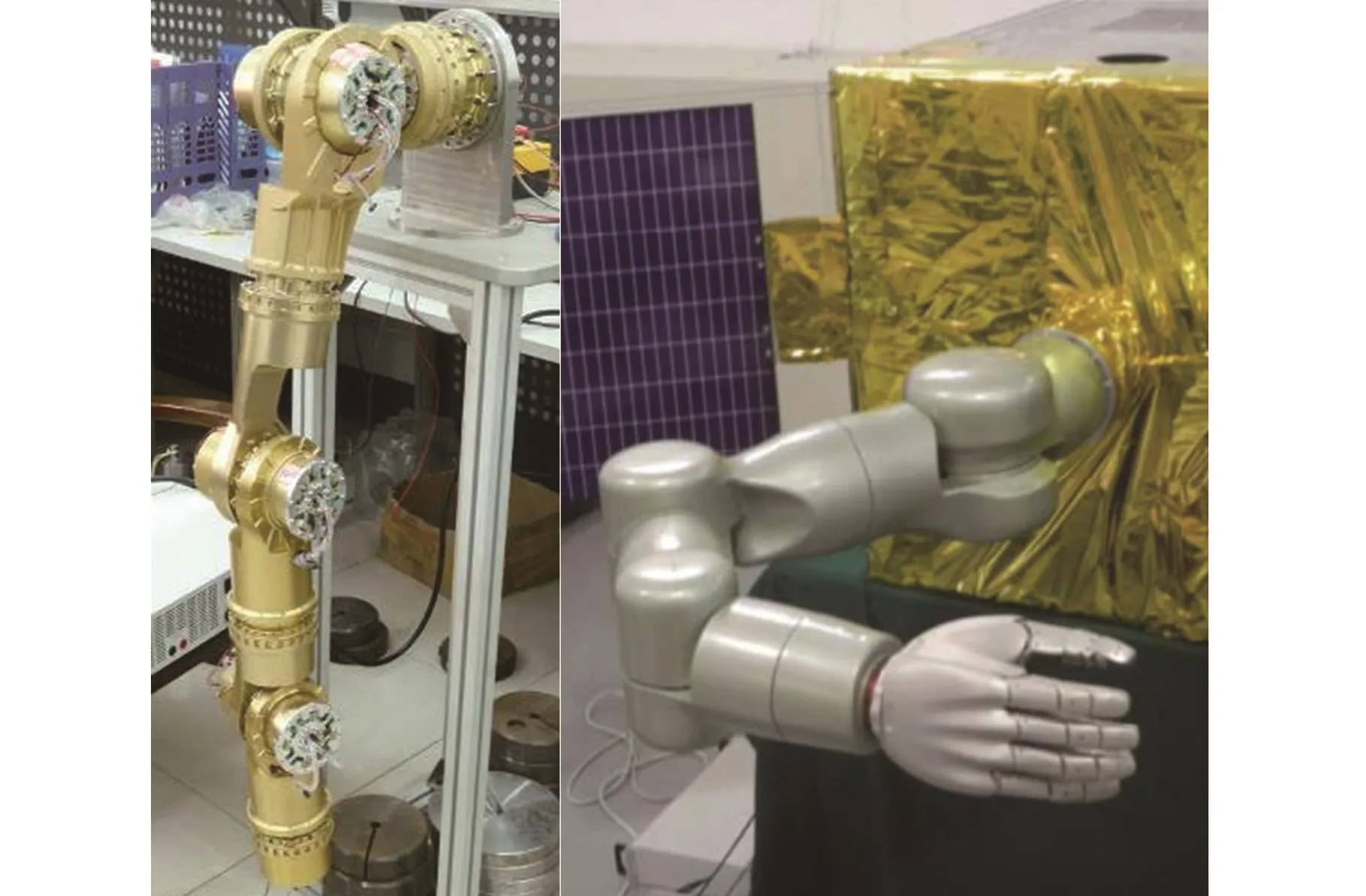
图3 7自由度模块化机械臂Fig.3 7-DOF modular robot manipulator
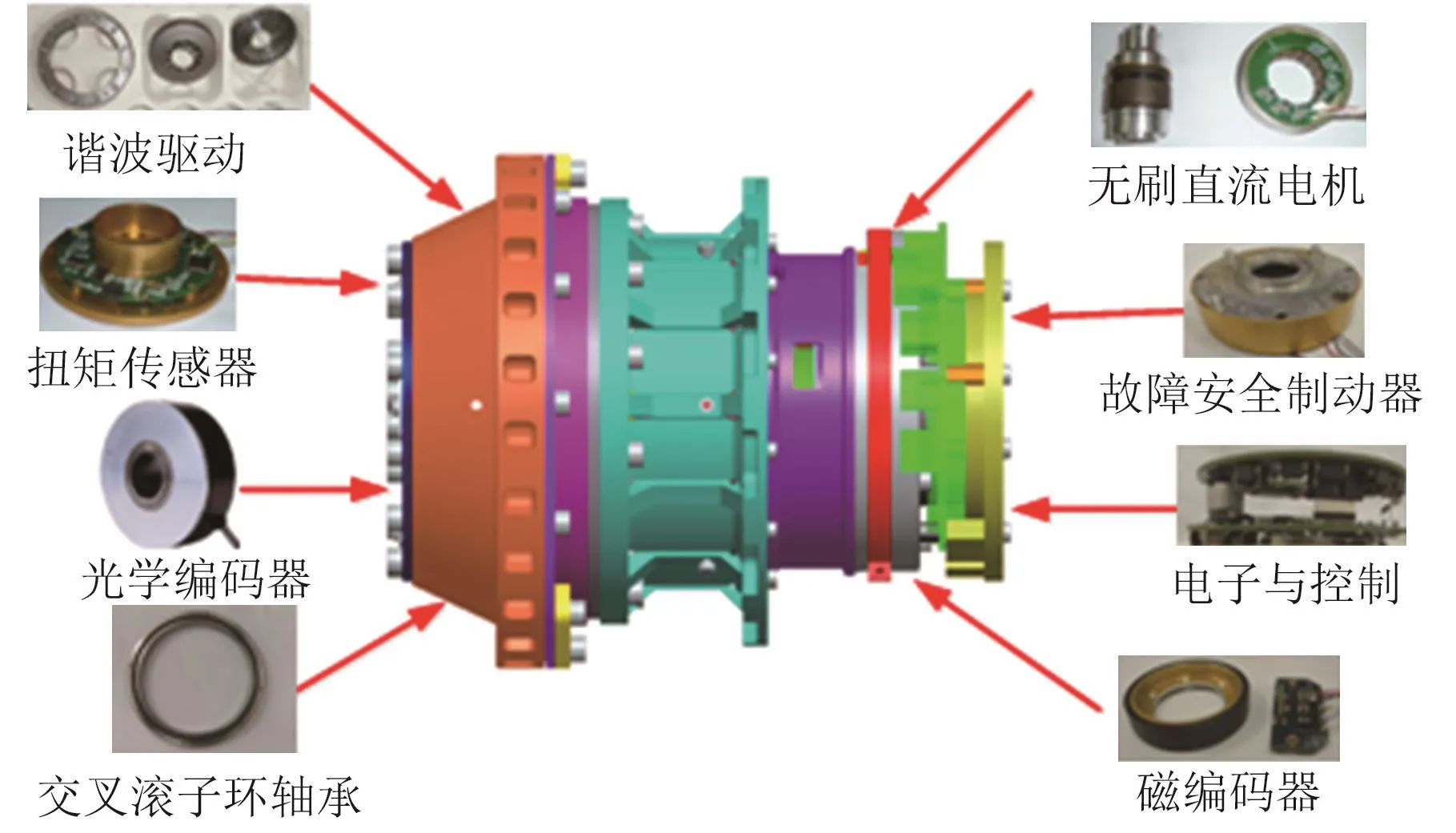
图4 手臂模块化的关节构成Fig.4 The composition of joint in modular arm
传感器对于提高机械臂的智能水平、作业水平、控制系统的稳定性等具有重要作用。手臂关节的传感器配置如表1所示。电机端的相对位置传感器采用自主研制的非接触绝对位置传感器,具有厚度小、便于系统集成的优点。3个数字霍尔传感器作为冗余的位置传感器,安装在电机的定子上,检测转子磁钢的位置。关节力矩传感器有2方面作用:①保护作用。防止机械臂在高速运动过程中出现不期望的、意外的碰撞;②控制作用。为机械臂的阻抗控制、抑振控制等提供力反馈信息。基于应变理论设计的关节力矩传感器采用8个应变片、构成2个全桥电路,提供冗余,同时也为消除温度和反向加载的影响,具有机械过载保护结构[18]。电流传感器采集与电机相绕组串联的采样电阻两端电压,实现电机相电流的检测,实时检测电机输入电流的大小。
灵巧臂电气系统设计采用模块化、多层次结构。底层是7个关节,FPGA(Field Programmable Gate Arrays)作为微处理器,实现关节的驱动、传感器信息采集及处理、高速串行通讯等功能,关节的驱动和控制均被集成在每个关节内。关节电气系统结构如图5所示,传感器信号处理模块、电机电流控制模块、关节伺服控制模块及串行通讯模块由控制板和驱动板两部分构成。关节控制器实现电机的控制、各传感器的测量、通讯等功能,关节驱动单元包括传感器信息处理、直流无刷电机驱动。
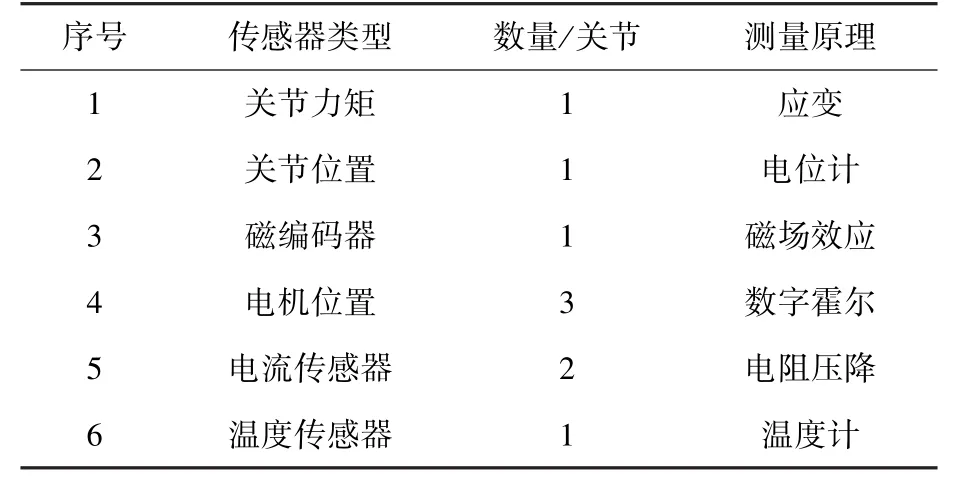
表1 模块化肩部和肘部关节传感器配置Table 1 Sensor allocation in modular shoulder and elbow joints
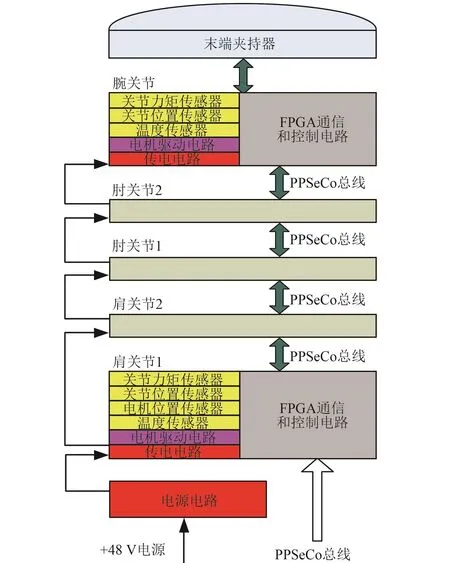
图5 机器人航天员手臂电气结构Fig.5 Electric structure of robot arm
2.3 灵巧手
机械臂末端安装的模块化手指由2个独立的单元组成:手指主体和手指基座。5根手指的指单元体完全相同,每个手指模块中包含一个扁平直流无刷电机和一个微型谐波减速器(减速比为100∶1)。电机与减速器之间采用减速比为1∶2.1的高速传送带进行连接。多种传感器集成在手指体内,BLDC电机控制器和驱动器集成在第一连杆的背面[19],指骨和远节指骨的运动通过钢丝传递,实现1∶1的耦合运动。
在手指基单元中2个旋转轴相交(图6)。对于卷曲/伸展运动,电机使用2个电机的扭矩对锥齿轮施加同步运动。对于外展/内收运动,电机转向相反的方向。使用小型电机和减速器的方案,减轻体积与重量,同时在指尖上达到双倍输出力。2个自由度的基关节,由4个相同结构的伞齿轮组成差动机构,关节及指尖的运动和输出力是由2套驱动系统、2个电机共同合成、承担的。1个自由度的手指单元和2个关节采用钢丝机构实现精确的1∶1耦合运动,并具有钢丝预紧机构。
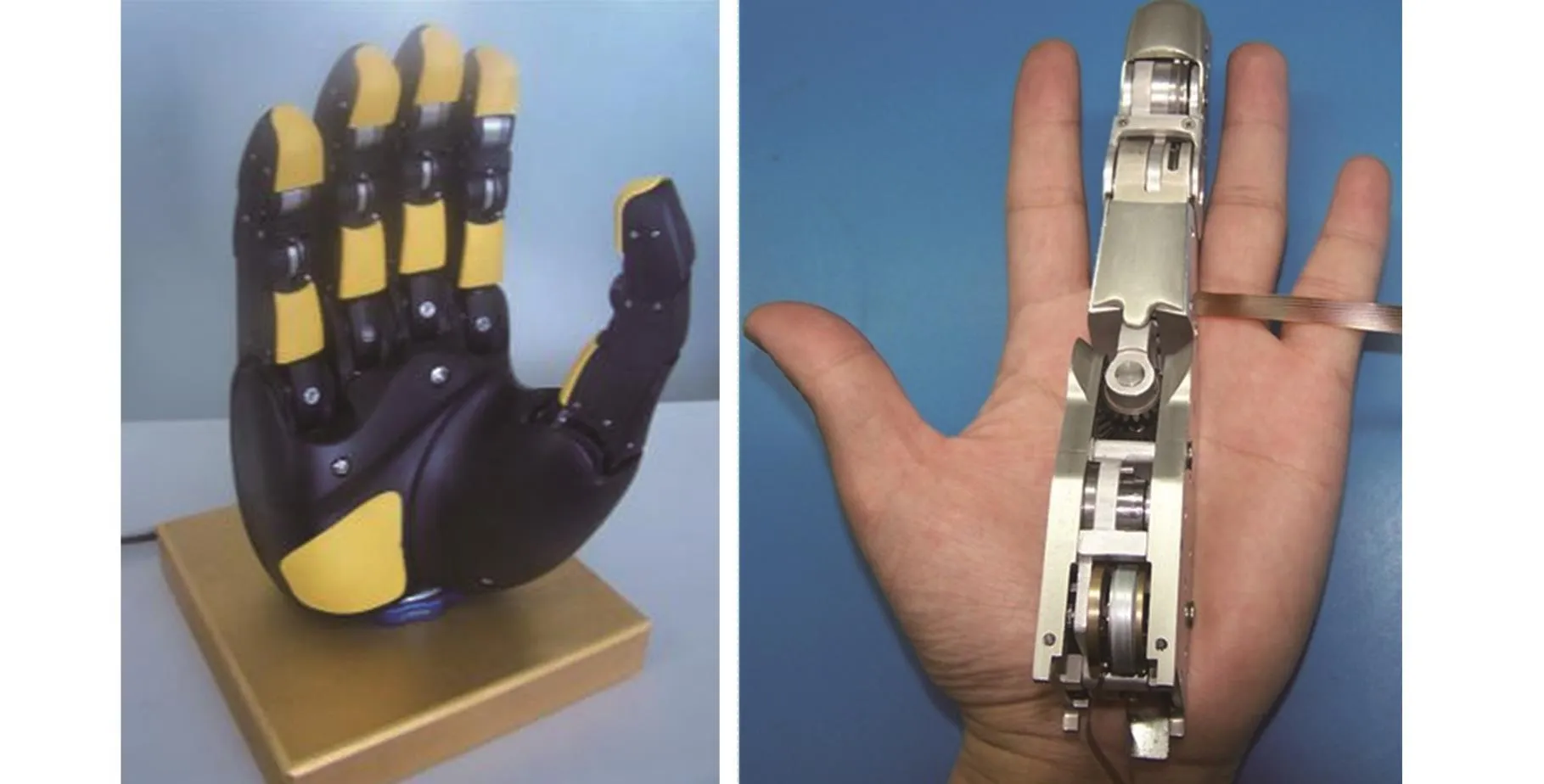
图6 DLR/HIT Hand IIFig.6 DLR/HIT Hand II
传感器对于灵巧手完成精细操作发挥重要的作用。灵巧手的手指传感器配置如表2所示。目的是在人造手中集成大量不同的传感器,以赋予灵巧手类似于人手的功能。每个关节都配有基于应变仪的关节扭矩传感器,并且2个自由度之间没有干扰。位于中间关节的扭矩传感器集成在远端指骨中,可以精确测量外部扭矩并且不会产生滞后现象。每个手指都配有一个微小的六维传感器(直径20 mm,高16 mm),为指尖开发了全数字输出功能。弹性体仅由一个部件制成,使传感器安装非常平坦,适合应变片的薄膜技术,便于组装。
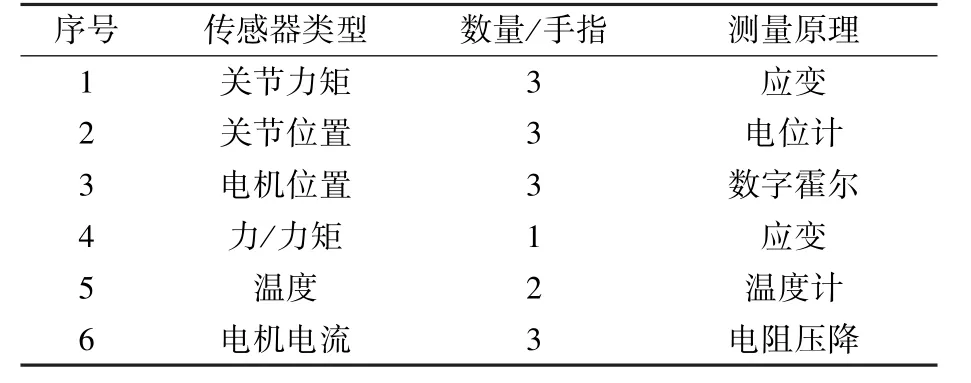
表2 手指传感器配置Table 2 Allocation of sensors in finger
灵巧手的硬件架构包括基于PCI的中央浮点DSP/FPGA处理器等,用于完成数据采集处理、电机驱动、通讯与实时控制等,其硬件结构如图7所示。灵巧手手指DSP和基础FPGA集成在手指主体和手指基座中。手指DSP通过高速(6MBaud)SCI总线接口与手掌内FPGA通信。手掌内部的FPGA控制器可分为两部分:一部分用于对传感器和手指分别进行命令通信,另一部分用于外部设备。灵巧手中的CAN网络和PPSeCo等接口连接到基于PCI任务控制卡的DSP用于简单的轨迹规划。基于PCI采用DSP/FPGA构建的控制卡主要任务是通过点对点高速串行通信(Point-to-point serial communication,PPSeCo),实现高级抓取规划,优化抓握和与灵巧手手掌通信的功能。
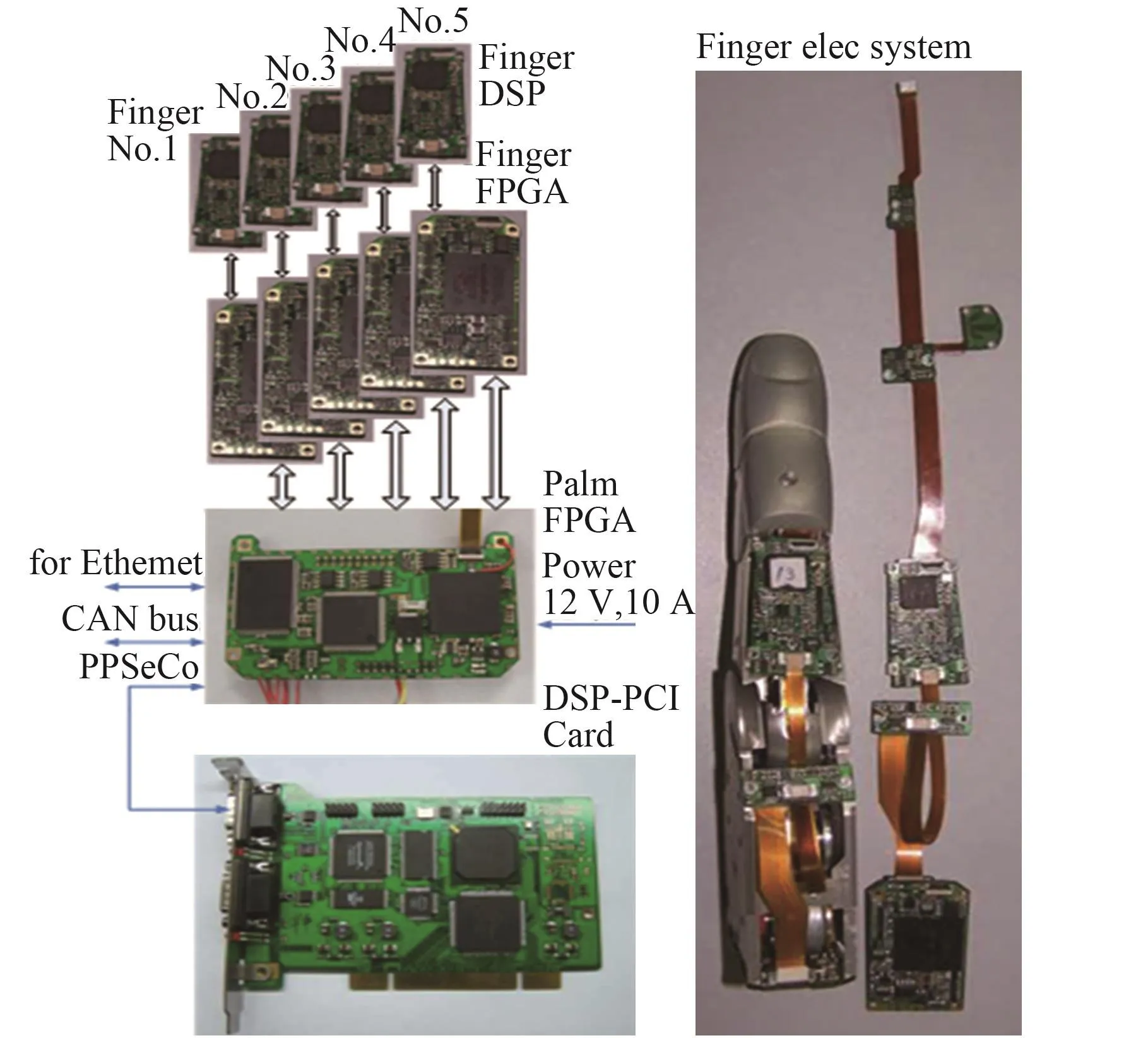
图7 DLR/HIT II灵巧手硬件结构Fig.7 Hardware structure of DLR/HIT II dexterous hand
2.4 头部
仿人机器人头部要实现俯仰、回转与侧摆3种方向的运动。头部具有基于差动机构的颈部基关节,能够实现俯仰和侧摆2个自由度,头部的上部关节能够实现头部的回转自由度.头部的三维模型图及实物图如图8所示。电位计与由电机霍尔传感器得到的关节相对位置信息融合,用于关节输出位置的检测。基于FPGA芯片实现头部的电气功能,包括电机驱动、传感器采集及通讯。
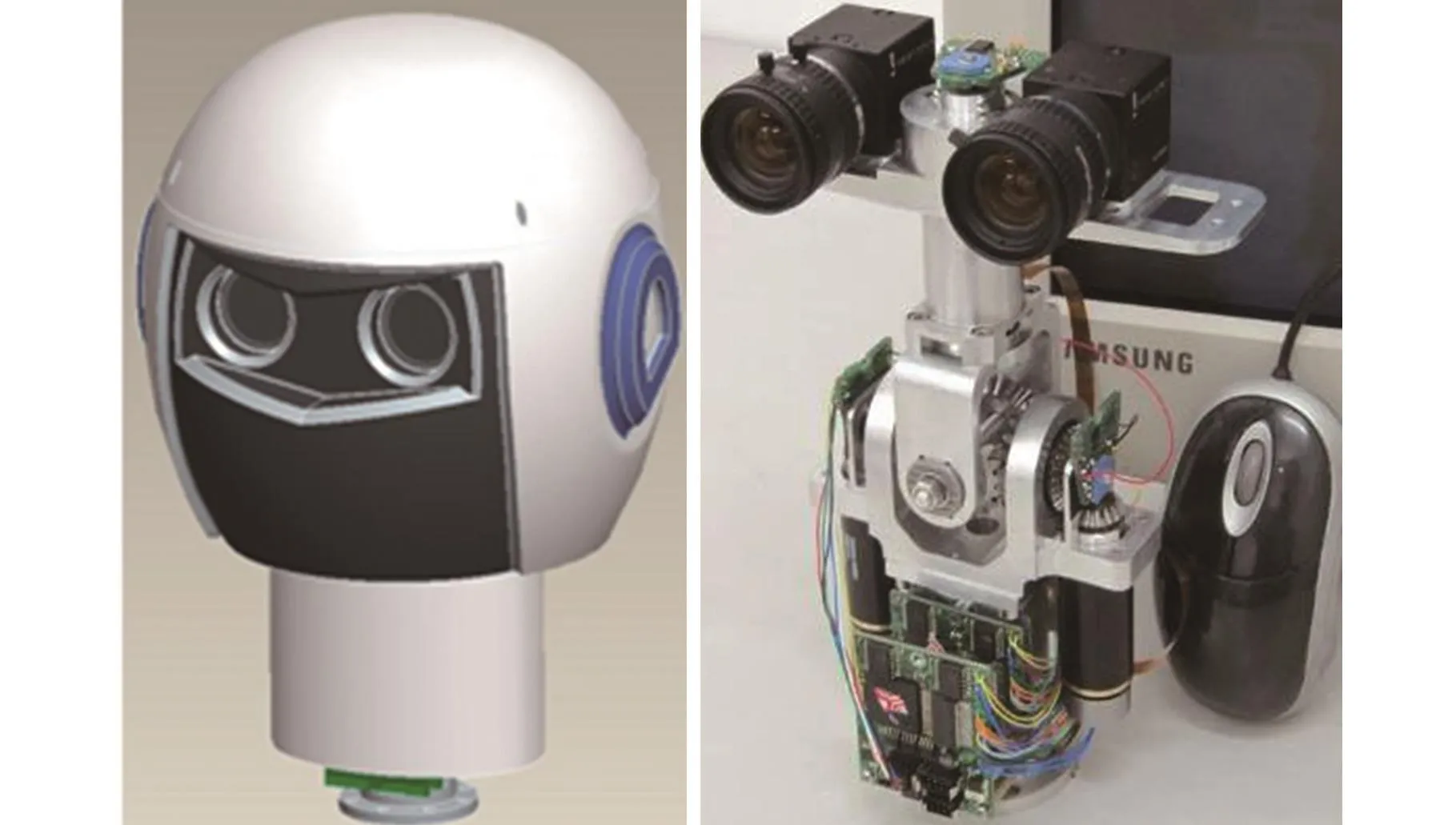
图8 头部三维模型及实物图Fig.8 The 3D model and prototype of head
头部上端安装双目高速相机。采用Point Grey公司生产的FL2-03S2摄像机,体积小、重量轻(不含镜头尺寸为 29×29×30 mm,重 58 g),非常适合集成于头部的狭小空间中。另外,相机的分辨率为648×488像素,图像采集频率为80 Hz,能够满足机器人系统的基本需求。相机和图像处理器之间采用IEEE-1394b总线传输数据,最大传输速度可达800 Mbps,可以实现图像数据的实时传输。
3 臂手系统在轨试验
为了验证机器人航天员系统的可行性以及在微重力环境下的操作能力,在天宫二号空间实验室部署了单臂手系统,并进行了多种在轨验证试验。
3.1 验证性演示试验
进行在轨状态维修试验与遥操作试验前,为保证系统状态正常,要进行演示试验以验证机械臂各分系统功能正常。①轻型机械臂功能验证:机械臂做自由空间运动,模拟人类“招手”动作,验证轻型机械臂软、硬件在微重力环境下的功能正常,包括关节驱动、传感器、轨迹规划及关节控制算法等;②机械臂摩擦辨识验证:使用机械臂重复拉拽固定弹簧的操作及逆行在轨摩擦参数辨识试验,试验过程如图9所示;③机械臂运动学参数天地一致性验证:控制轻型机械臂手眼系统,使末端到达空间实验室舱壁目标标靶位置,利用相机测量舱壁视觉标靶并采集测量数据。在对比的过程中验证机械臂运动学参数天地一致性,试验过程如图10所示;④全局相机功能验证:通过机械臂基于视觉伺服的捕获试验,尝试捕获舱内自由漂浮的小球,验证并评价基于全局相机图像的采集与处理功能,试验过程如图11所示。
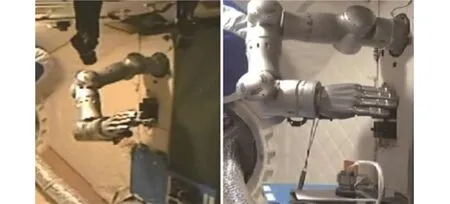
图9 机械臂关节摩擦辨识Fig.9 Identification of friction of robotic joint

图10 手眼系统相机视场Fig.10 Hand-eye system camera field of view

图11 抓漂浮小球Fig.11 Grabbing the floating ball
3.2 模拟维修试验
机器人模拟在轨拆卸中的3个典型操作:拆卸电连接器(图12)、撕开多层防护(图13)和使用电动工具拧松螺钉(图14)。在拆卸电连接器试验中,灵巧手使用拇指和食指抓紧电连接器,旋拧数次后,把电连接器从其安装位置拆卸下来。试验中灵巧手采用力控制模型,达到在机械臂旋拧轴线和电连接器轴线不完全匹配的情况下,控制灵巧手与电连接器之间接触力的目的[20]。
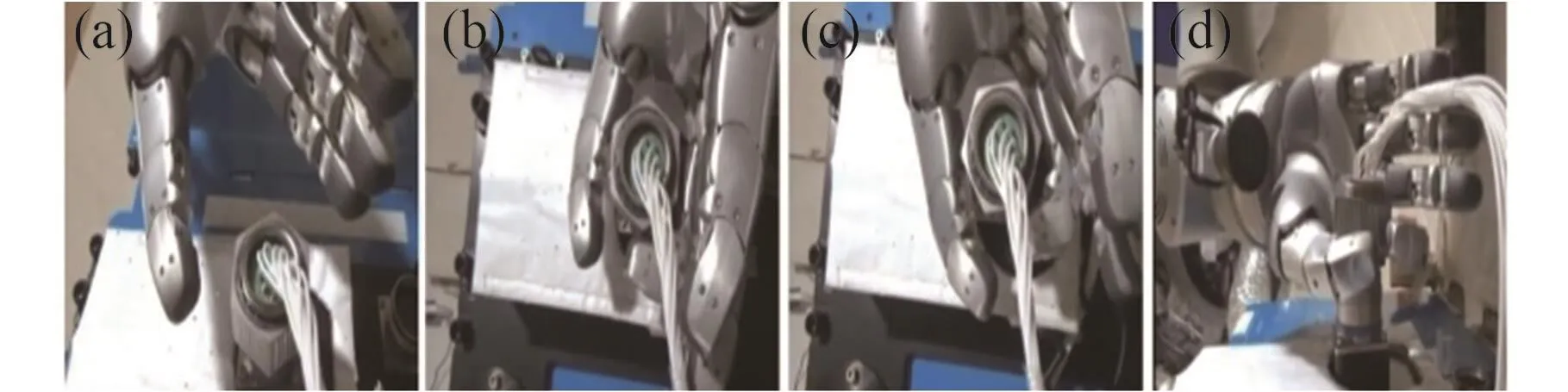
图12 拧松电连接器试验Fig.12 Unscrewing electrical connector test
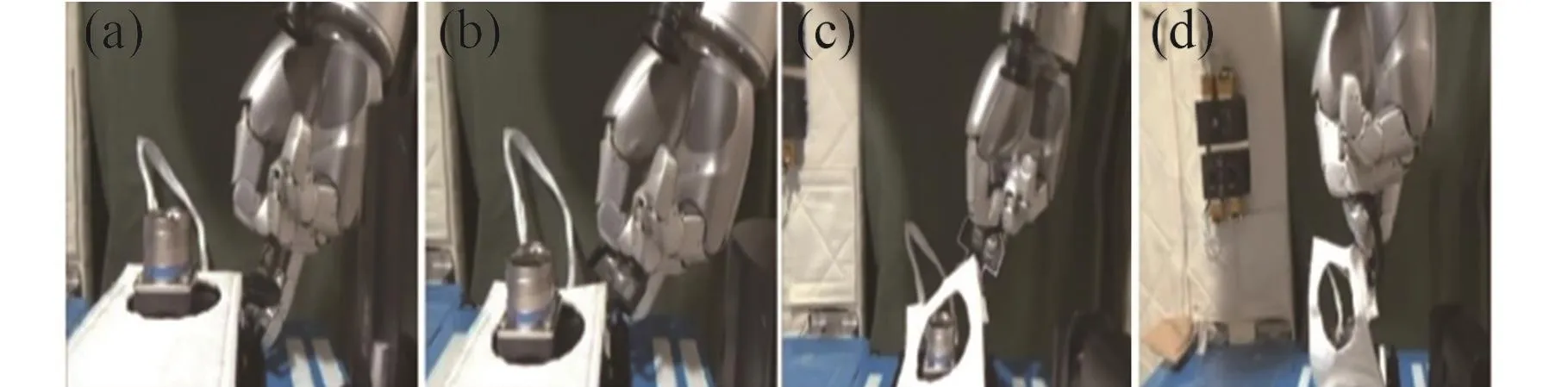
图13 撕开多层防护试验Fig.13 Tearing off multilayer protection test
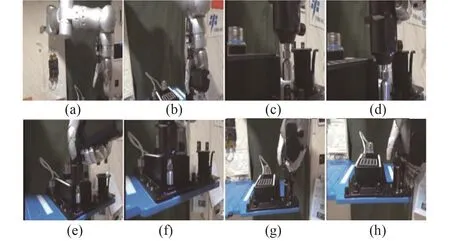
图14 抓握电动工具拧松螺钉试验Fig.14 Grabbing power tool and unscrewing test
在使用电动工具拧松螺钉试验中,首先机器人先将存放在电动工具存放处的工具抓取握住,然后沿规划的轨迹平稳运动至目标螺钉正上方,利用视觉伺服将电动工具末端对准螺钉。位置准确无误后,使用灵巧手打开电动工具开关按钮。同时机械臂切换至力控制模式。保持此方向下压一段时间后,机械臂执行上抬动作。重复动作,拧松第2个螺钉。最后机器人把电动工具放回存放位置。
3.3 在轨遥操作试验
在轨遥操作与天地遥操作相比,具有控制回路延时小、控制精度高的特点。同时,由于现阶段机器人仍然不具备自主执行在轨任务的能力,考虑在空间机器人执行任务中使用在轨遥操作的手段完成在轨任务。在天宫二号项目中设计测试机械臂与灵巧手在轨遥操作控制能力试验。试验系统由遥操作工作站、机器人本体以及控制机械臂的空间鼠标与控制灵巧手的数据手套组成。利用这套装置,航天员可以使用遥操作设备直接向机器人发送期望位置的命令。数据手套接收到的位置命令和空间鼠标给出的期望三维位姿信息被遥操作工作站接收并预处理,转为灵巧手的期望关节位置信息和基于机械臂逆运动学的关节期望位置。航天员控制机械臂与灵巧手的试验过程如图15所示。

图15 航天员控制机械臂和灵巧手Fig.15 Control of manipulators and dexterous hands by astronauts
4 结论
1)对于空间站、探月工程、深空探测等领域的应用与任务要求,建立的机器人航天员系统由双臂、双手、头部等构成,具有位置、力矩、视觉等多种感知功能,可实现机器人航天员的自主柔顺操作、航天员在轨或地面遥操作等控制。
2)设计并完成了臂手系统在空间微重力环境下的多种演示验证试验,达到了验证机器人航天员手臂硬件结构设计与人机协同在轨遥操作技术的目标。
3)后续工作将针对机器人航天员各个子系统协调分工的快速化、准确、高稳定的操作需求,研究双臂机器人多运动自由度复杂系统的协调优化控制、面向多种复杂任务的自主运动规划、未知环境扰动下鲁棒干扰抑制控制等,使机器人航天员系统在太空环境中不仅能够精确完成搬运、装配等典型场景下的任务,而且能够降低人力劳动强度,实现面向特定任务的精准控制、快速作业、自主规划以及抗扰稳定,保证在复杂环境下的最优协调操作。