基于路图特征和SVM的钢轨裂纹识别
2019-10-25
(南京航空航天大学 自动化学院,江苏 南京 211106)
钢轨表面裂纹是诱发轨头核伤和轨头剥离的初始阶段缺陷,及时有效地实现对钢轨表面裂纹的检测和识别对于保证高铁的安全运行具有巨大的实际意义[1]。
漏磁检测因为原理简单,检测结果直观,能够根据检测到的漏磁通反向推导铁磁性材料表面和近表面缺陷的各项参数等优点,被广泛应用于钢轨裂纹的检测。漏磁检测在应用于钢轨裂纹检测中时,为了提高钢轨裂纹识别的精度,在合理设计检测信号装置的前提下,对信号的分析与处理也至关重要。
大多数的研究工作[2-4]都基于MFL信号的传统特征(时域、频域、时频域)实现钢轨裂纹的定性和定量分析。因其不同通道信号存在一定的耦合、漏磁信号与缺陷参数的非单一映射关系[3]等,导致从传统的特征进行上述分析得到的结果不尽如人意,迫切需要从新特征的角度实现钢轨裂纹信号的分析。
有研究表明:时序信号与路图信号具有结构对应性,即:时序信号的采样点对应路图的顶点,时序信号的信号值对应路图的图信号值[5]。高艺源[6]等人将路图信号与滚动轴承振动信号结构对应起来,提取振动信号的图域特征,应用到滚动轴承故障诊断中,取得了良好的识别效果。钢轨裂纹MFL信号也是一种时序信号,因此,可以借鉴文献[5]和文献[6]的思路,将钢轨裂纹MFL信号建模成路图信号,通过提取路图信号的特征,实现钢轨裂纹的识别。
1 路图相关理论
图特征提取方法的基本思想:将时域MFL信号建模成路图信号模型,借助图论(图谱理论)来提取信号特征。文献[7]~文献[9]对相关的图信号处理的相关概念做了详尽的介绍,下面仅介绍用到的相关概念。
1.1 路图的结构
图通常用顶点vi的集合V和边ej的集合E来表示,即:G=(V,E)。对于一个顶点个数为n、连接边的条数为m的图,其中,V={v1,v2,…vn},E={e1,e2,…,em}。路图是一种单向的、相邻顶点间由边连接而成的最直观、最简单的图模型结构。按照图的定义方式,由10个顶点组成的路图P10如图1所示。
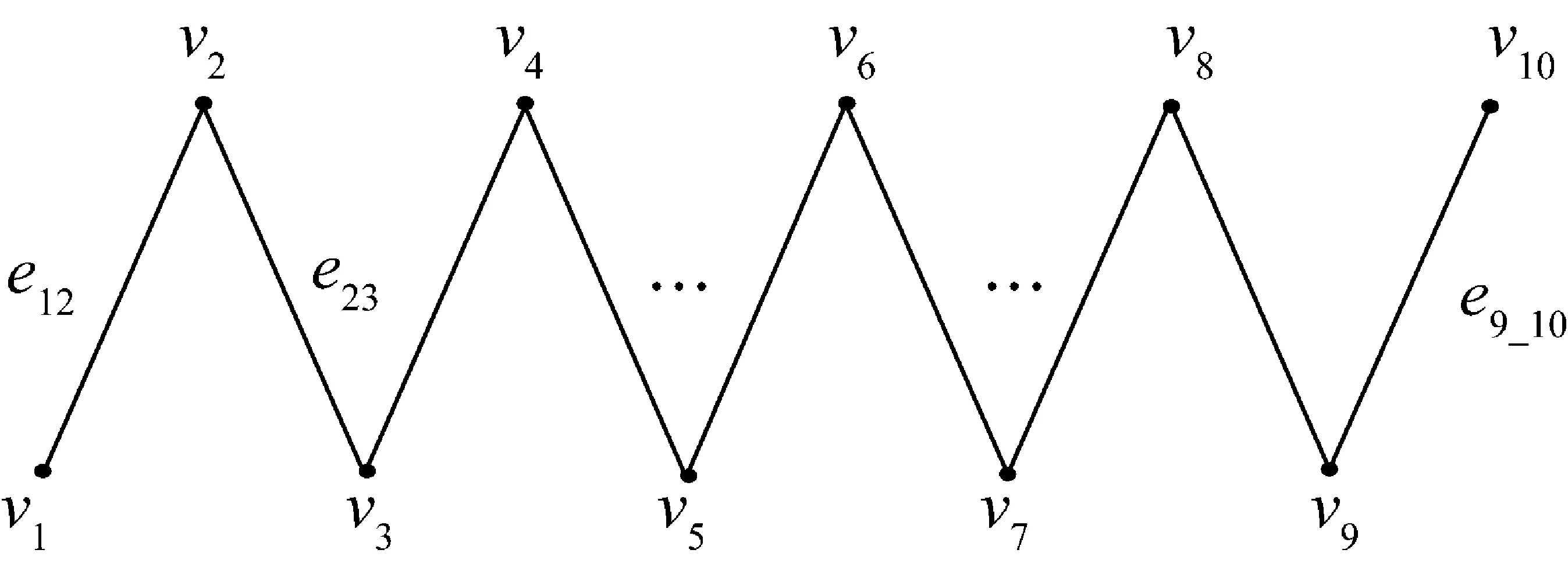
图1 路图结构示意图
其中,vi为路图的第i个顶点,i=1,2,…10,eij为第i个顶点与第j个顶点构成的边,其中,i,j满足i=1,2,…,10,j=1,2,…,10,i≠j。
结合图时域MFL信号与以上路图结构模型可知,时域MFL信号与路图模型有其结构对应性,即时域信号的采样点对应路图信号的节点,时域信号的函数值对应路图信号的函数值。为了使用图谱理论的方法实现MFL特征的提取,有必要引入图结构的矩阵表示。
1.2 图结构的矩阵表示
图信号处理中对图的表示方法基本分为两种:邻接矩阵和拉普拉斯矩阵。下面对其基本定义进行描述。
① 邻接矩阵W:由连接各顶点的权重wij构成的实对称矩阵,对于一个顶点数为n的图的邻接矩阵为n×n的实对称方阵。其中顶点间的权重wij按式(1)计算:
(1)
式中,xi和xj对应vi和vj的信号值;θ为热核宽度常量,此处取θ=0.75。
② 拉普拉斯矩阵L:考虑了邻接矩阵的同时,将度矩阵D引入,可更全面地表示图的结构信息,相比邻接矩阵,可提供更多的信息。因此,在GSP较多应用L。
L=D-W
(2)
1.3 图谱理论
图的矩阵表示对图的结构进行了描述,然而要实现图信号的特征提取,就需要对获得的L进行分析。图谱理论借助矩阵分析的观点,通过研究拉普拉斯矩阵特征值和特征向量来分析矩阵(图)包含的信息。故对以上得到的拉普拉斯矩阵进行标准正交分解:
Lpi=λipi
(3)
式中,λi为特征值;pi为第i个特征值对应的特征向量。对得到的特征值进行降序排列得到:λ1≤λ2≤λ3≤λ4≤…≤λn-1≤λn。以上就得到了对应图信号的图谱指标λi。根据图谱理论,拉普拉斯矩阵特征值包含了图的丰富信息。因此,可以将其作为图信号的一种特征,对信号进行描述。
1.4 图傅里叶变换

(4)

(5)
GFT为图信号提供了类似“频率”的概念,且特征值谱的幅值和特征向量的最大值存在近似倒数的关系[8],即与FT频域特征相比,GFT的特征值域特征更加明显,更适合用来获取信号频域信息。因此,可以考虑提取MFL信号的图“频域”特征,实现钢轨裂纹的识别。
2 实验平台与裂纹参数
2.1 实验装置平台
漏磁检测是指铁磁性材料被磁化后,因试件表面或近表面的缺陷而在其表面形成漏磁场,通过检测漏磁场的变化进而发现缺陷的一种电磁无损检测方法。漏磁检测对铁磁性材料的表面和近表面裂纹检测具有良好的效果。本次实验所用的数据是在实验室搭建的钢轨裂纹漏磁检测平台上得到的[10]。平台主要由高速转动平台、漏磁检测装置、霍尔感应探头、信号调理电路、数据采集卡及PC机构成。漏磁检测装置由正、反方向励磁装置(反向励磁装置对钢轨测试样本方向磁化,每次对测试样本进行正向磁化时不受上次磁化后的剩磁影响)。实验平台示意图如图2所示。
为了模拟真实漏磁检测中检测设备沿着铁轨以一定速度向前检测,用电机控制转盘速度(2~55 m/s),霍尔传感器(传感器型号UNG3503)固定在转盘上方,相对速度和运动方向与转盘方向相反。
信号采集装置由16个霍尔传感器依次排开,采集转盘上裂纹的MFL。这样设计是为了完全覆盖钢轨的表面,最大程度地获取裂纹的信息。由以上分析可知,对于一个钢轨裂纹,可以同时测量得到16路MFL。
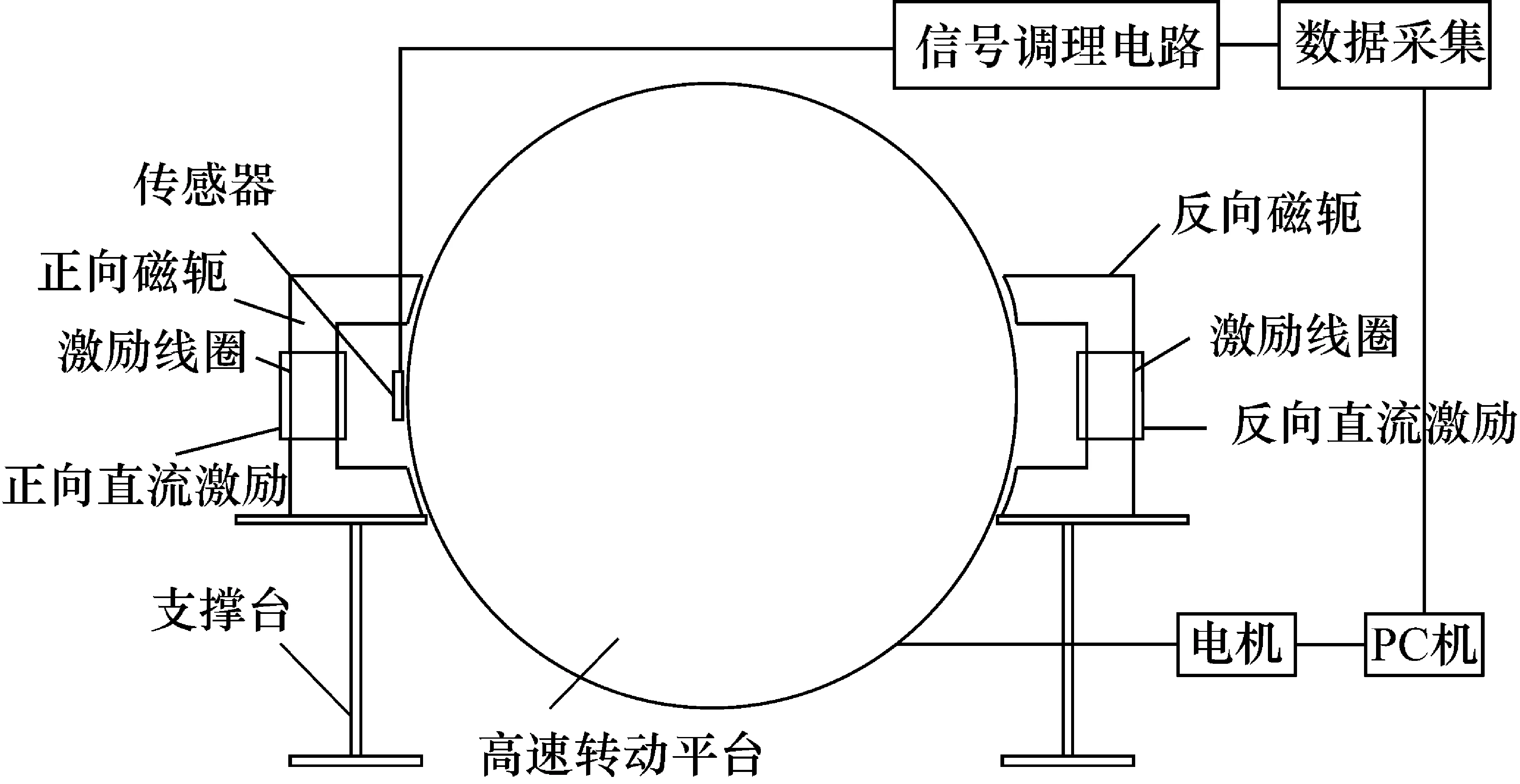
图2 钢轨裂纹漏磁检测平台示意图
2.2 人工裂纹参数说明
为了对一个钢轨自然裂纹进行详尽的描述,通常引入宽度、深度、水平角、垂直角等参数对其轮廓进行刻画,钢轨自然裂纹以上参数的量级通常都在毫米级别,且其轮廓形状不规则。在实验中,为了模拟自然钢轨表面裂纹,在转盘(与铁轨材料相同)表面人为加工19种(不同参数)不同的人工裂纹。不同种人工裂纹的各项参数如表1所示。
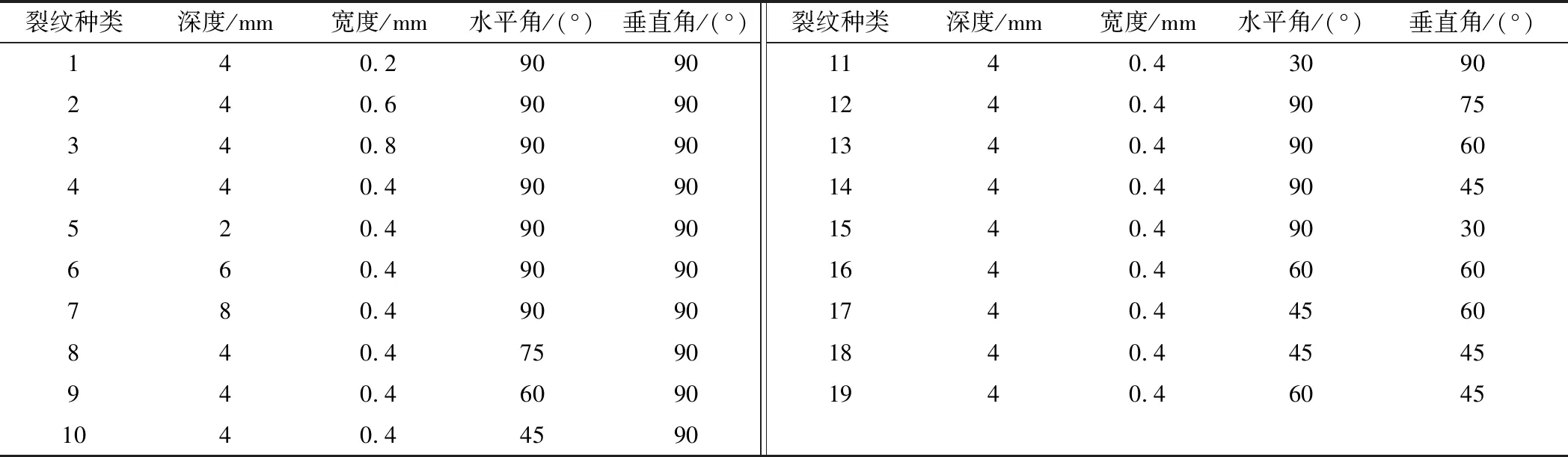
表1 不同钢轨裂纹参数
为了对不同种人工裂纹有更加直观的认识和理解,以下给出的图3是对应表1中不同的裂纹的俯视图和侧视图。
结合表1和图3可知,19种裂纹可以分为5组,其中,1~4为第1组,4~7为第2组,8~11为第3组,12~15为第4组,16~19为第5组。前4组中,用来研究单一参数(宽度、深度、水平角、垂直角)变化、其余参数都不变对MFL的影响。第5组用来研究两个参数(水平角、垂直角)同时变化对漏磁信号的影响。
在实际采集的数据中,由于某些传感器失效,裂纹加工中1号裂纹打穿(实际中不存在此类裂纹),将以上通道的数据去除,最终得到有效数据为:9通道18种裂纹MFL。为了对钢轨裂纹有直观的认识,图4给出了6通道上2号裂纹对应的一个MFL信号样本。
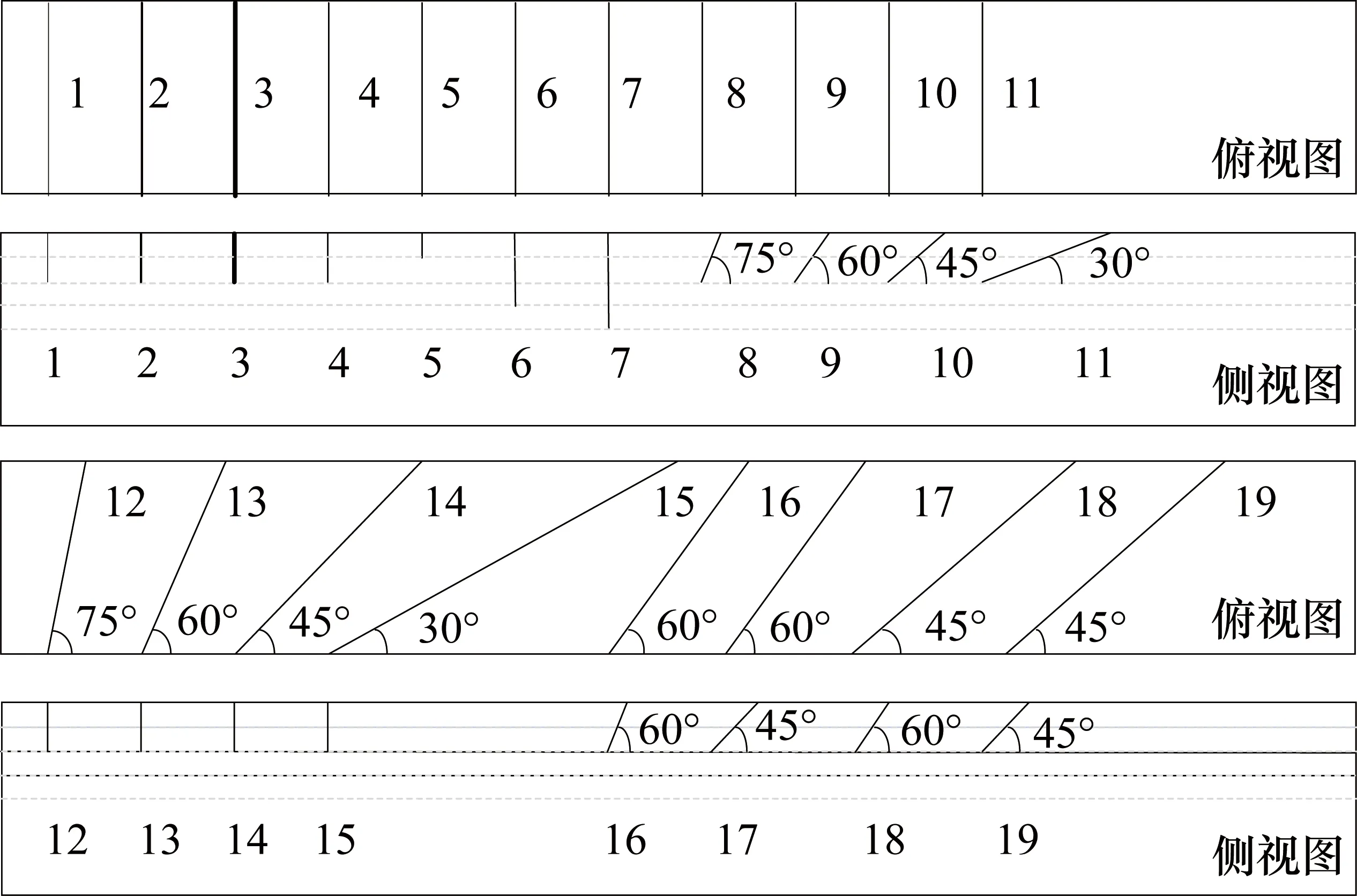
图3 不同人工裂纹的俯视图和侧视图
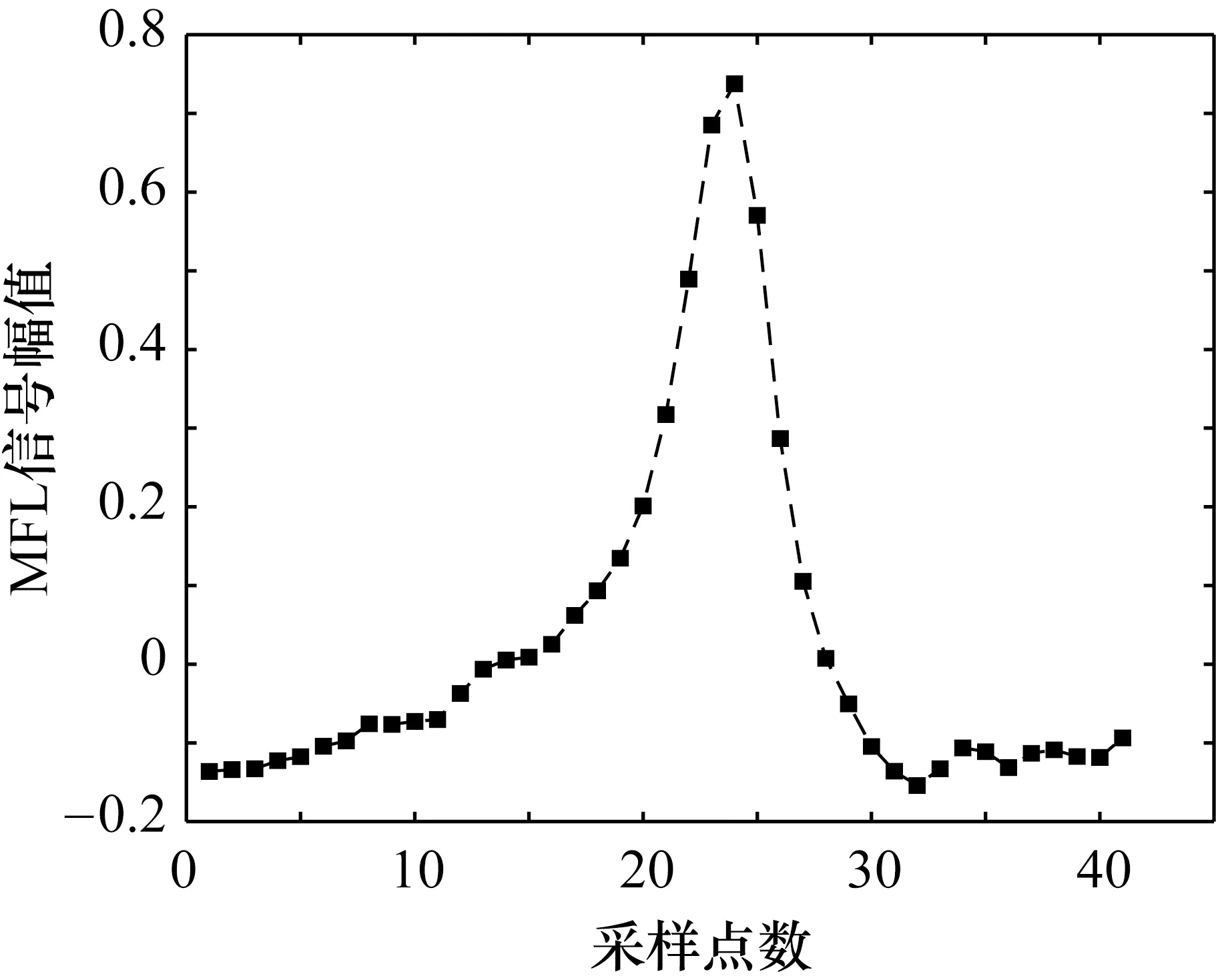
图4 6通道2号裂纹MFL信号
3 所提方法及有效性验证
3.1 路图特征和SVM的钢轨裂纹识别方法
基于路图特征和支持向量机的钢轨裂纹识别方法分为训练和测试两个阶段。
(1) 训练阶段。
① 用式(4)构造MFL信号fn的邻接矩阵W1,得到MFL信号fn的图矩阵形式L1;然后用式(3)得到信号的图傅里叶变换基(FTB),利用式(5)计算得到MFL的GFT,按表2中左边公式计算MFL的各图“频域”特征。
② 用式(4)构造MFL信号fn的邻接矩阵W2,得到MFL信号fn的图矩阵形式L2;然后用式(3)得到信号的图谱指标,按表2右边公式计算MFL的各图“时域”特征。
③ 特征提取,对于一个MFL信号,提取图“频率”特征和图“时域”特征各11个,共22个特征,组成初始特征集合F。为了便于描述,对提取的特征进行编号。图频率特征包括:GFT的前5个点(F1~F5)、幅值均值(F6)、重心(F7)、均方根(F8)、标准差(F9)、偏斜度(F10)、峭度(F11)。图谱特征包括:前5个最大的特征值(F12~F16)、第二小特征值(F17)、拉普拉斯算子(F18)、拟拉普拉斯能量[10](F19)、拉普拉斯能量(F20)、特征值的均值(F21)、特征值标准差(F22)。以上特征分别反映了MFL信号对应路图信号的频域幅值、能量、波形指数、图谱域信号的平滑性、能量等信息,能有效表征信号的特征。F6~F11和F18~F22的计算方法如表2所示。
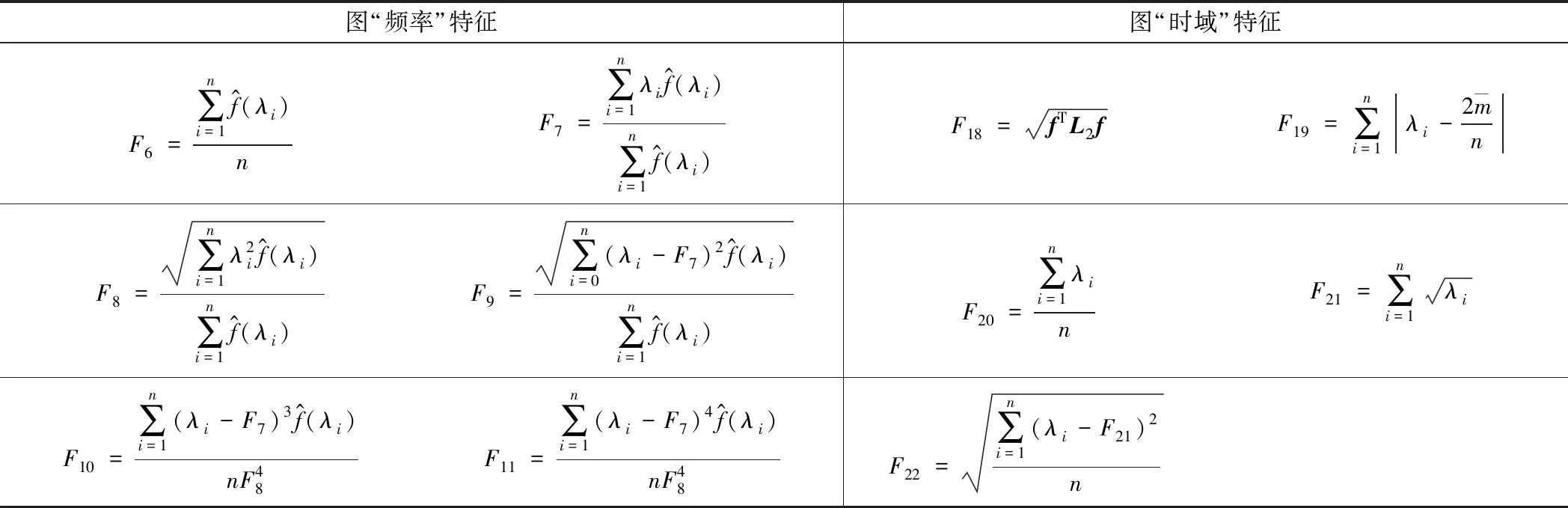
表2 图特征参数

④ 按上述方法计算所有不同裂纹MFL的特征作为SVM的输入,训练得到分类器。
(2) 测试阶段。
按照训练阶段步骤①~步骤③得到测试样本的图特征,送入训练好的SVM分类器,得到钢轨裂纹测试样本所属类别。
3.2 所提方法总体流程图
基于路图特征和支持向量机的钢轨裂纹识别方法流程图如图5所示。其中预处理阶段包含信号去噪、对齐、截取等步骤,采用自适应滤波方法对信号进行去噪处理[11]。由于采集得到的信号是一个长序列,包含了一定时间内采集到的所有18种裂纹的数据(对于一个裂纹的MFL信号,存在一个峰值,如图4所示),为了方便后续信号分析,以信号的第一个峰值为对齐点,将不同通道的数据进行对齐后按裂纹类型进行截断处理。
3.3 所提方法有效性验证及对比实验
将所提方法应用于实测钢轨裂纹信号分类识别。分类器SVM核函数设置为径向基核函数,参数c和g[12]用网格寻优得到。为了降低SVM对训练样本选择的敏感性,增强其泛化能力,对样本提取的特征进行归一化处理。
为了说明所提方法的优越性,将所提方法与基于传统特征的钢轨裂纹识别方法相比,按文献[2]提取MFL信号定性和定量分析中常用的特征(MFL的时域统计特征、波形指标、频域特征、时频域特征共31个)将以上特征统称为传统特征,方法称为传统方法。为了保证实验条件相同,两种方法使用的训练样本和测试样本相同,为不失一般性,实验中采用5折交叉验证。将两种方法得到的实验结果记录为表3(其中每行表示该种类裂纹在不同通道下5次的平均识别率,每列表示在该通道下不同种裂纹5次的平均识别率)。
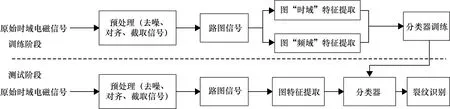
图5 基于路图特征和SVM的钢轨裂纹识别总体流程图
由表3可知,针对同一种裂纹,所提方法在不同通道上的识别精度略有差异(如2号裂纹,在9通道具有最低识别率为84.29%,4~6通道下识别率最高为97.14%),但都控制在合理的范围内(这是因为不同通道间的MFL之间存在相互耦合,导致某些通道信号对缺陷参数不敏感)。所提方法所得18种裂纹的平均识别率都在83.51%以上(黑体表示),最高能达到95.34%,且不同裂纹识别率之间的标准差较小,说明了可对各种裂纹都能进行有效识别。
对比两种方法(同一通道)下的平均识别率和标准差可知,在所有通道上,所提方法的18种裂纹的平均识别率都高于基于传统方法的识别率,且标准差较传统方法更小。说明所提方法能有效识别各种裂纹,且稳定性更好,证明了所提方法的优越性。
4 结束语
本文从新特征的角度出发,提出了一种基于路图特征和支持向量机的钢轨裂纹识别方法。该方法基于变换域特征的思想,将时域MFL转化为图域信号,从图域提取最能表达信号的图域特征。
实验结果表明:所提方法在提取图特征个数(22)较传统特征个数(31)更少的情况下,具有更高的识别精度且识别稳定性更强。说明了该方法具备训练时间短、识别精度高、识别稳定性强等优势,为钢轨裂纹MFL分析与处理提供了一种新的思路,具有较高的实际应用价值。
