基于慧鱼模型的一种振动式大枣采摘装置方案设计*
2019-10-22闫磊聂阳文胡星
闫磊,聂阳文,胡星
基于慧鱼模型的一种振动式大枣采摘装置方案设计*
闫磊,聂阳文,胡星
(西安建筑科技大学机械基础实验中心,陕西 西安 710055)
现有的大枣采摘方式主要是人工采摘,果农用杆子将枣打下再收起来,采摘任务繁重,费时费力。设计了一种振动式大枣采摘装置及采摘方法,以解决上述存在的技术问题。采摘装置操作简单,具有较高的安全性和可靠性,能够提高采摘效率,节省人力物力,并较好地保证采摘水果的质量,减轻采摘时对大枣的损伤。
慧鱼模型;大枣采摘;采摘装置;方案设计
枣是北方的重要果树之一,新疆、河北、山东、河南、山西、陕西等是大枣主要产区。大多数枣产区都在自然生态条件较差的干旱山区丘陵、河滩沙地、盐碱滩地,甚至是大漠戈壁等不适耕作的贫困地区,对脱贫致富起重要作用。中国大枣产业发展迅猛,枣树种植总面积超过250万公顷,占世界枣树种植总面积的50%以上,总产量360多万吨,占世界总产量的1/3。中国是世界枣的唯一出口国,在相当长一段时间内,中国在世界红枣生产和贸易中占有绝对主导地位。区别于北方其他常见果树,如苹果树、梨树等,枣树本身有许多生物学特性是很符合高产稳产需要的。然而,枣树的平均高度在3~5 m,树枝繁密,纵横交错。目前采收枣的方法主要还是手摘法和打落法,手摘法只能针对较低矮的枣树,且因为枣树本身有尖刺所以导致工效很低,而针对较高大的枣树的打落法则容易引起枣的损伤,对树体的损伤也大,大枣的采摘是整个生产中最耗时耗力的一个环节,枣采摘期间与要投入的劳动力约占整个种植过程的50%~70%,人工采摘枣所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%。采摘质量的好坏直接影响到枣的储存、加工和销售,从而最终影响市场价格和经济效益。
针对枣类采摘问题,本文设计了一款交互性良好的小型半自动人工辅助采摘设备,本产品与手持式采摘果枣装置相比,具有效率高、劳动强度低、操作简单等特点。
1 方案设计与工作原理
采摘装置如图1所示,主要由行走部分、采摘部分和收集部分组成。
行走部分采用履带驱动方案,履带驱动方案具有通过性和爬坡性强等优点,适合在果园等复杂地形运动。
采摘部分由振动电机、传动装置和夹持装置组成。振动电机通过传动装置对夹持装置进行驱动。传动装置为一曲柄滑块机构,振动电机固接在曲柄滑块机构的曲柄之上,夹持装置固接于曲柄滑块机构的滑块之上,通过传动装置,把电机的回转转化为夹持装置的往复运动。夹持装置采用气缸驱动实现夹持与张开运动,当夹持装置夹住树干时,电机通过传动装置能够带动夹持装置发生振动,进而实现果实的振动脱落。
收集装置包括收集网和伸缩支架。伸缩支架架设在运动装置底盘之上,收集网铺设在伸缩支架之上,当夹持部分夹住树干后,伸缩支架打开使得收集网张开,用于收集跌落的水果。
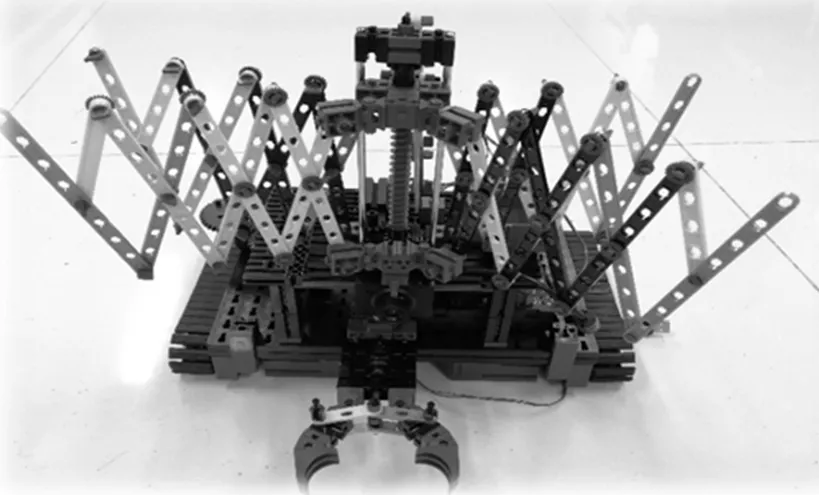
图1 采摘装置的总体结构
2 采摘装置的设计
采摘系统由驱动部分和夹持部分组成。
2.1 驱动部分设计
驱动系统如图2所示,采用曲柄摇杆机构与曲柄滑块机构通过杠杆连接的设计方案,曲柄摇杆机构首先转化电机的旋转运动为往复运动,在摇杆上选取适当长度作为曲柄滑块机构的曲柄,以曲柄往复摆动驱动夹持部分做往复运动,以实现果树的振动。通过对曲柄滑块机构曲柄长度的调解和马达的调速,实现夹持部分以不同的振幅和频率进行振动,以完成对不同大小果树的采摘。
曲柄摇杆机构由大齿轮带动小齿轮,小齿轮和连杆相连接,驱动小齿轮转动。在采摘装置振动电机转速一定的情况下,该传动方案可使小齿轮具有更高的转速,提升了夹持部分的振动频率。通过杠杆两端不同臂长在运动时角速度相同,而线速度不同的原理,使曲柄滑块机构的滑块(夹持部分)能够让夹持系统实现高频率、小振幅的振动,避免对果树根基的损伤。
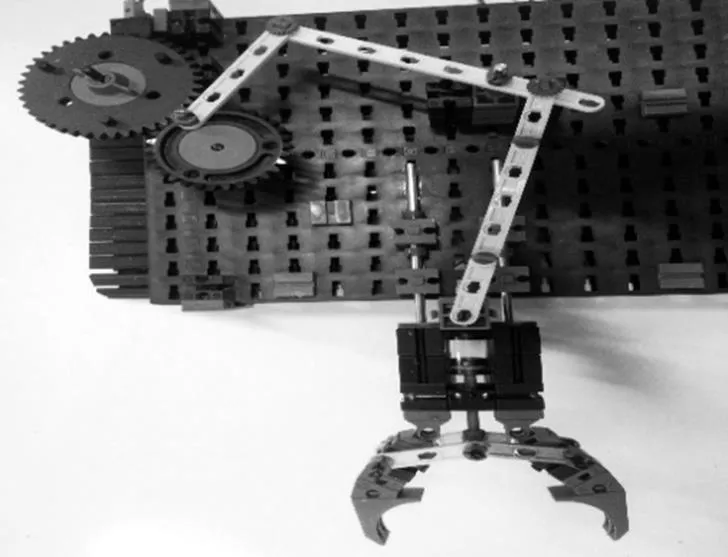
图2 采摘驱动装置
2.2 夹持部分设计
考虑到向果树传递振动需要夹持部分保持一定的夹持力度,而通过电机驱动夹持部分难以控制夹持力的大小,夹持力过大会损伤果树树干,而过小则无法有效传递振动,因此夹持部分采用气缸驱动一个变异的平面四杆机构来实现夹持的动作,夹持装置如图3所示。
通过调整溢流阀的额定压力控制夹持部分的加持力度。左右两个连杆以铰接的方式与夹持部分双臂连接,通过气缸驱动,实现夹持部分对果树的夹持功能。

图3 夹持装置
3 自动伸缩网的设计
自动收缩网由丝杠螺母机构与五组平面四边形机构组成,连杆的一端铰接在采摘装置底盘上,另一端铰接在螺母上,通过丝杠的双向回转运动实现网的收缩与伸张。小车前端两组平面四边形机构采用人工的方式带动网对果树的包拢,可以适应与树冠大小不同的果树,以人工辅助、人车配合的方式对果树进行采摘。自动伸缩网装置如图4所示。
4 控制方案设计
4.1 控制器选择
控制器采用两套慧鱼模型配套的Txcontroler控制板并联,如图5所示,分别控制设备的运动系统、振动系统及自动伸缩网系统,并且可通过蓝牙或WALN连接到电脑、智能手机,或者通过红外遥控、手柄操控等远程控制方式实现对采收设备的控制。
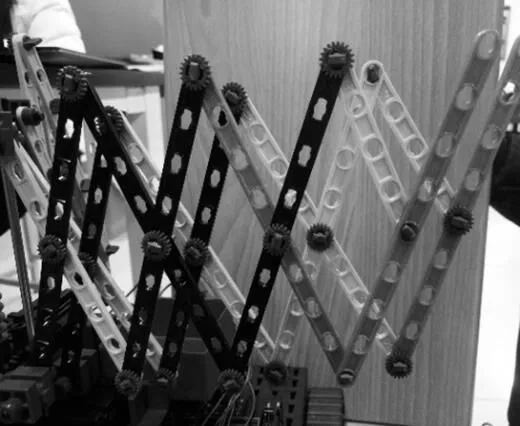
图4 自动伸缩网装置
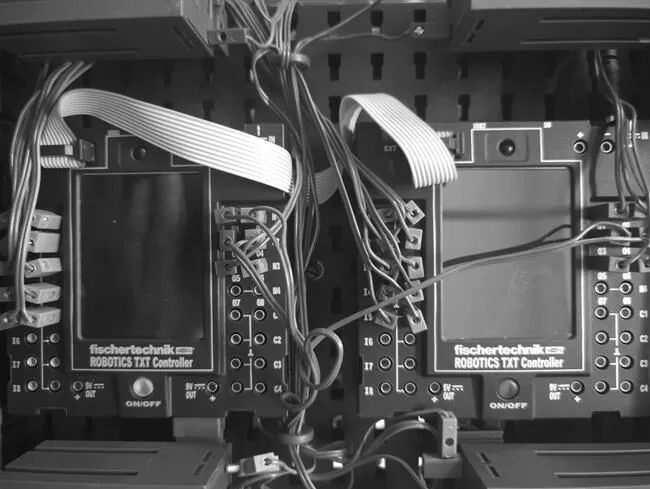
图5 Txcontroler控制板
4.2 控制手柄
手柄由7个限位开关组成,如图6所示,限位开关I4、I5、I6、I7号分别控制小车的前进、后退、左转和右转,限位开关I2号和I3号分别控制可自动收缩网的伸张和收缩,在网伸张到最大程度会触碰小车上的限位开关,张网会自动停止。限位开关I1号变为常闭状态。
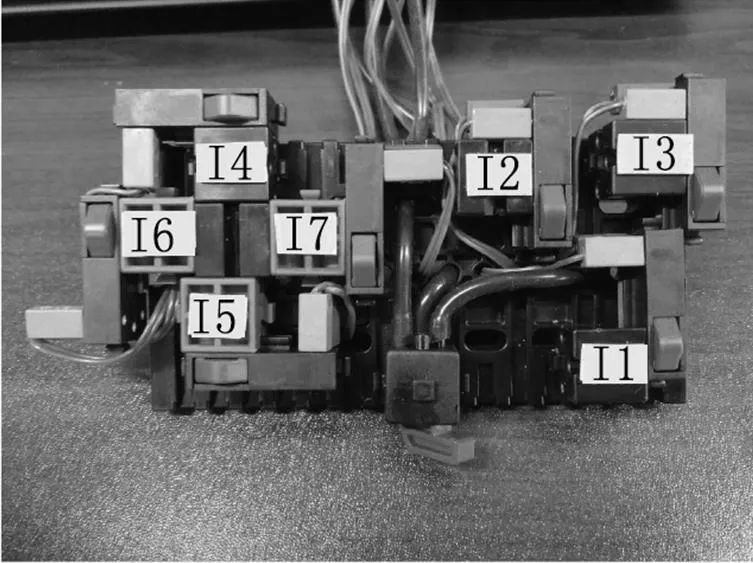
图6 控制手柄
5 结束语
本文设计的振动式大枣采摘装置操作简便,人机交互良好,具有较高的安全性和可靠性,并且在提高采摘效率、节省人力物力的基础上,能够较好地保证采摘水果的质量,减轻水果在采摘中受到的损伤,具有良好的推广价值。
[1]张莹,刘芳,何忠伟.我国红枣产业的经济分析与前景展望[J].农业展望,2011,7(10):36-40.
[2]孙恒,陈坐模,葛文杰.机械原理[M].8版.北京:高等教育出版社,2013.
[3]于传浩,章涤峰.一种气动机械手夹持机构的设计[J].液压气动与密封,2003(5):22-28.
TP241
A
10.15913/j.cnki.kjycx.2019.19.018
2095-6835(2019)19-0045-02
西安建筑科技大学教学改革项目(编号:JG021725)
〔编辑:王霞〕
