航天器智能能力的构建*
2019-10-14吕良庆安军社
吕良庆,吴 迪,安军社
(1. 中国科学院 国家空间科学中心 复杂航天系统电子信息技术重点实验室, 北京 100190;2. 中国科学院大学, 北京 100049)
随着航天领域的发展,航天器上的数据系统面临着内外两方面的挑战。外部挑战是指日益复杂的用户需求,表现为未知、多变、复杂、高性能的有效载荷日益增长的要求,系统集成化、小型化的发展趋势,以及集群、编队、星座、空间组网和天地一体化的设计需要。内部挑战是指接口设计多样化,各项目应用过程中协议不统一[1],难以重用。工程项目还面临着“好、快、省”的竞争压力。这些问题的解决都需要引入智能技术,需要一个能够支持智能能力持续构建的系统架构和平台。
1 航天器智能能力等级
航天器智能自主控制是在航天器中引入人工智能与智能控制技术,使航天器在不确定环境中以及内部结构和参数变化时,能够不依靠人的帮助和地面支持,完全依靠航天器上软硬件设备自身的能力实现高精度、高稳定度、强适应性和长寿命的正常运行[2-3]。为指导航天器上智能能力的构建,可以采用分级的方法。
文献[2-3]给出了初级、中级和高级智能自主控制的定性划分,其实质是智能能力从地面向航天器技术转移和部署的过程。而智能自主运行体系结构是实现的基础[4]。
2005—2006年,美国航空航天学会(American Institute of Aeronautics and Astronautics,AIAA)的空间操作和支持技术委员会(Space Operations and Support Technical Committee,SOSTC)进行了一项飞行器系统使用自动控制技术的情况调研,共调研了12个组织的88个项目。为了进行这项调研,调研组事先按照5个维度对项目进行了分类,即自动程度、任务类型、载荷目标、自动系统配置和系统应用情况。在自动程度方面,制定了1个6级的智能推理能力等级,分别是:人工控制(1级)、自动通知(2级)、地面人工控制的智能推理(3级)、地面自动的智能推理(4级)、星载智能推理(5级)、自动思考航天器(6级)[5]。此次调研给出了如下一些分析结论:
1)大部分智能能力部署在地面,少部分在航天器上。智能能力首先在地面上研发实现,再以渐进发展的形式转移部署在航天器上。
2)低轨道航天器对智能能力的需求普遍较低;有高精度、复杂需求的航天器,高轨卫星以及深空探测器对智能能力的需求高,但数量少。
3)需要智能能力的领域主要集中在任务规划、数据处理、数据传输、导航和轨道控制、有效载荷操作、飞行器控制等方面。相对而言,任务规划和飞行器控制采用智能技术的收益高,因为这两方面的常规操作主要是在地面人工完成的,如果能够转移到天上,将会明显减轻地面的运行成本,提高航天器完成任务的控制精度。
考察时间跨度上的航天器智能技术应用情况[6-7],可以看到有复杂化、系统化、高层化的趋势,但其硬件基础和需求配置又是根据特定任务背景而定的,针对性很强,通用性弱。很多航天器上采用的智能技术具有局部性(某个飞行阶段、任务方面或组成部分)和试验性,以及特定的应用(如状态监视和故障诊断、任务规划和调度、目标识别和姿态指向控制、导航和轨道机动等[3])。采用的智能技术主要包括专家系统、神经网络推理、模糊控制等[8]。不同层次的智能能力采用的智能技术在复杂程度和高级程度上没有必然的对应关系。
文献[9]针对航天器上的处理能力从任务执行、任务数据管理和故障管理3个方面对自动化程度进行了分级。任务执行分为4级,分别是地面控制任务加有限的安全措施(E1)、地面定义的事先计划执行(E2)、基于事件的自动操作(E3)、目标导向的任务操作(E4)。数据管理分为2级,即可视弧段外、失效情况下的数据存储(D1)和全任务数据存储(D2)。故障管理分为2级,即失效情况下建立安全模式(F1)、失效情况下的正常任务操作重构(F2)。
文献[7、10]中,航天器智能可以定性为如下3个等级:
1)自动(automatic):使用软件或硬件按部就班地代替例行手工过程,而且依然包括人工参与。
2)自治(autonomous):自我支配和自我导向,能够模拟人的参与过程,而不是简单代替。
3)自主(autonomic):自我管理,做出确保任务成功所需决策的过程。
通俗地理解,自动过程是按照事先设计好的固定流程执行,没有条件判断和思考过程;自治过程是对外在环境的条件式、反应式动作执行,支持对系统自身的管理、任务管理,类似于生物神经系统;自主过程包含系统管理、任务管理以及出于主动意图的思维过程,类似于大脑的思考,自主过程要依赖自治和自动过程来实施其思考的结果。
智能在工作层次上又可以划分为任务规划、任务计划和任务执行[5]。任务执行一定由航天器操作,因此可以说所有航天器都具有自动能力和部分自治能力。如果将任务规划和计划工作也交给航天器,航天器就具备了相应的自主和自治能力,而地面需要与航天器智能能力进行相适应的调整。不同的航天器对自主和自治的理解和需要程度是不同的,它们可以是航天器的整体行为,也可以是局部行为,可以通过引入其他因素进一步划分等级。例如在无人机[11]、汽车等行业对智能自主控制等级的划分,结合了各自的应用领域面对的特定场景等因素。
智能能力的程度可以划分为底层反应、中层程序化和高层思考3个层次。反应没有学习过程,只是对从传感器系统获得的状态信息进行响应;程序执行大量的例行评估和计划行为;思考是自我审视和决策的过程[7]。这3个层次可以对应系统自我管理、任务自我管理和思考规划3种应用能力。
系统自我管理的目标是维持系统的健康和正常运行。任务自我管理的目标是保证系统按照任务需求执行。它们是通过人的综合设计能力,在地面将规划的“思考”能力具体化为软件程序,事先驻留在航天器上,由其根据航天器资源条件进行判断和执行,是对任务执行过程的管控和情况应对,是战术层次的。思考规划是将这种人的综合设计能力部署在航天器上,由其进行类似的“思考”,以完成后续相同或更为优化的任务。这种思考是全局式的战略决策过程,在引入智能技术时,有着开放的、广阔的研究前景。高级能力是以低级能力为基础的,低级能力偏向静态,高级能力趋于动态变化,它们之间的界限是模糊的,衔接是“无缝”的。
地面向航天器发送的遥控数据注入指令的内容也可以分为3级,即命令级、计划级和任务级[12]。命令级是航天器直接可执行的指令;计划级带有时间、位置等限定条件,对其的“思考”是在地面完成的;而任务级需要航天器进行“思考”后分解为计划级和命令级,才能付诸执行。
上述对智能能力的讨论对照分析见表1。
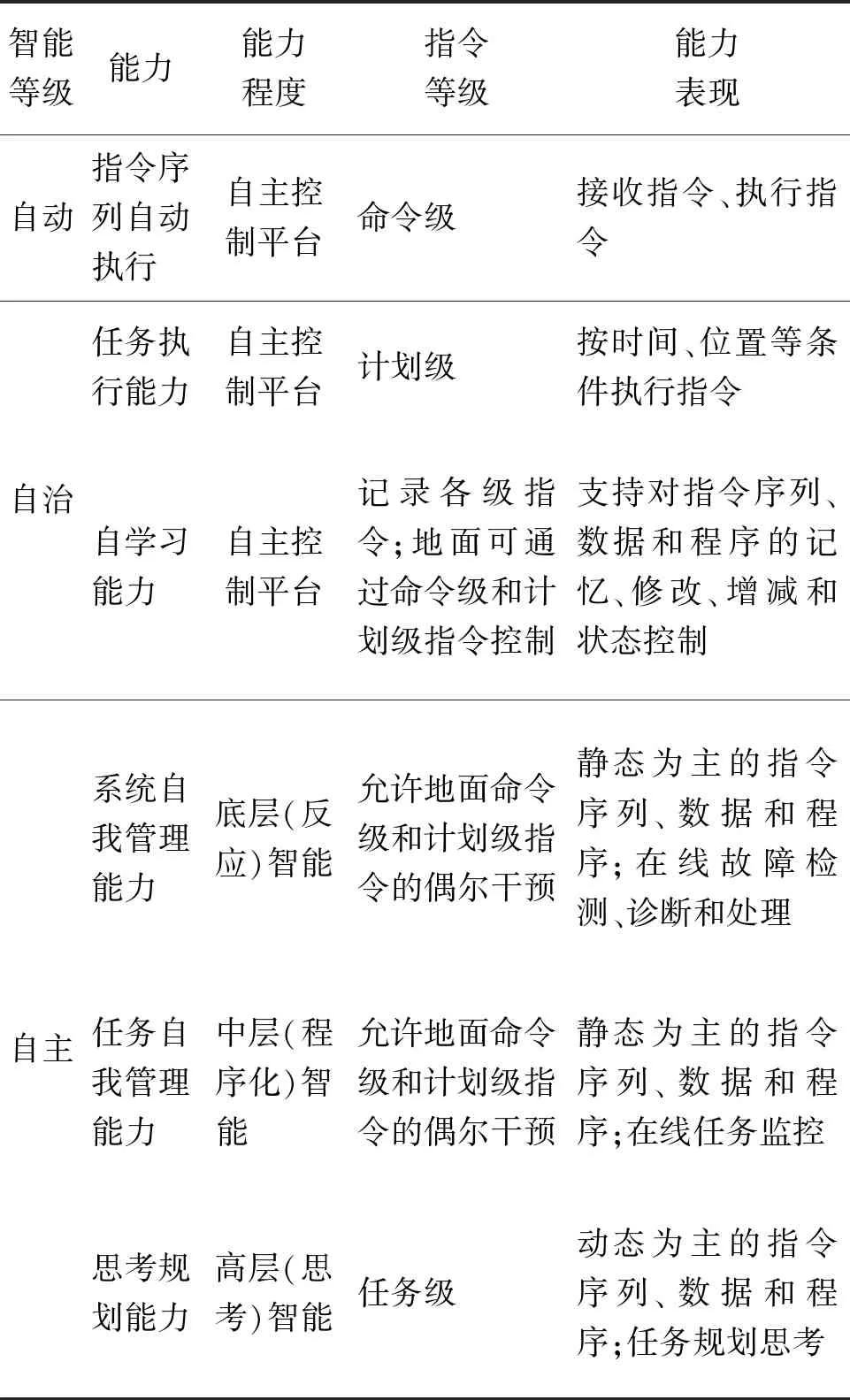
表1 航天器智能等级
虽然航天器上的数据处理能力在不断提升,但是与地面相比,在网络、存储和处理器等方面的能力依然存在差距。而用户对数据处理的需求和期望比星上数据处理能力增长得快。因此,是否有必要将各个等级的智能能力全部放在航天器上,是每一个项目需要考虑的问题。
2 智能能力构建的途径
表1中的各级智能能力可以通过图1的5阶模型,自底向上渐进地构建,逐步实现各级智能能力的平台化和通用建设。图1中的各阶能力说明如下。
2.1 第1阶:数据注入接收能力
实现数据注入接收过程的自动分析和处理能力,解决数据注入的接收、识别和拼接问题,以适应数据注入星地传输的重复、断续(延迟)、无序、容错等情况,实现地面注入操作的实时性、并发性和任意性,表现出对用户的友好。
本能力需要基于开放系统互连(Open System Interconnect, OSI)的7层通信协议、空间数据系统咨询委员会(Consultative Committee for Space Data System,CCSDS)的空间链路业务(Space Link Services,SLS)协议栈[13]和航天器接口业务(Spacecraft Onboard Interface Service,SOIS)架构[14]等关系构成的下层通信管理。本能力是在CCSDS空间包协议[15]和SOIS包业务[16]基础之上进行的应用层处理。
2.2 第2阶:任务执行能力
有实时和延时两种执行方式,实现注入指令执行的准确性、正确性和容错性,确保执行的可靠性和安全性,实现自动和初级自治能力。
2.3 第3阶:自学习能力
宏指令是事先将内容固定或数据量比较大的数据、文件、程序、执行序列事先装配或在执行前加载到航天器中,然后通过简短的编号形式进行调用,选择进行释放的一种指令执行方式。
借助非易失性存储、可改写的特性,支持系统自学习能力,从而提供了灵活的地面和星上指令调度和生成机制。
补充初级自治能力,是实现系统自我管理和任务自我管理的基础。
2.4 第4阶:系统自我管理能力
即在线监控能力,解决在线异常和故障的实时自动识别、隔离、处理、报警等问题,是故障预案的事后措施。
解决对任务执行过程的监控,保障任务顺利执行或至少保持一个安全状态。
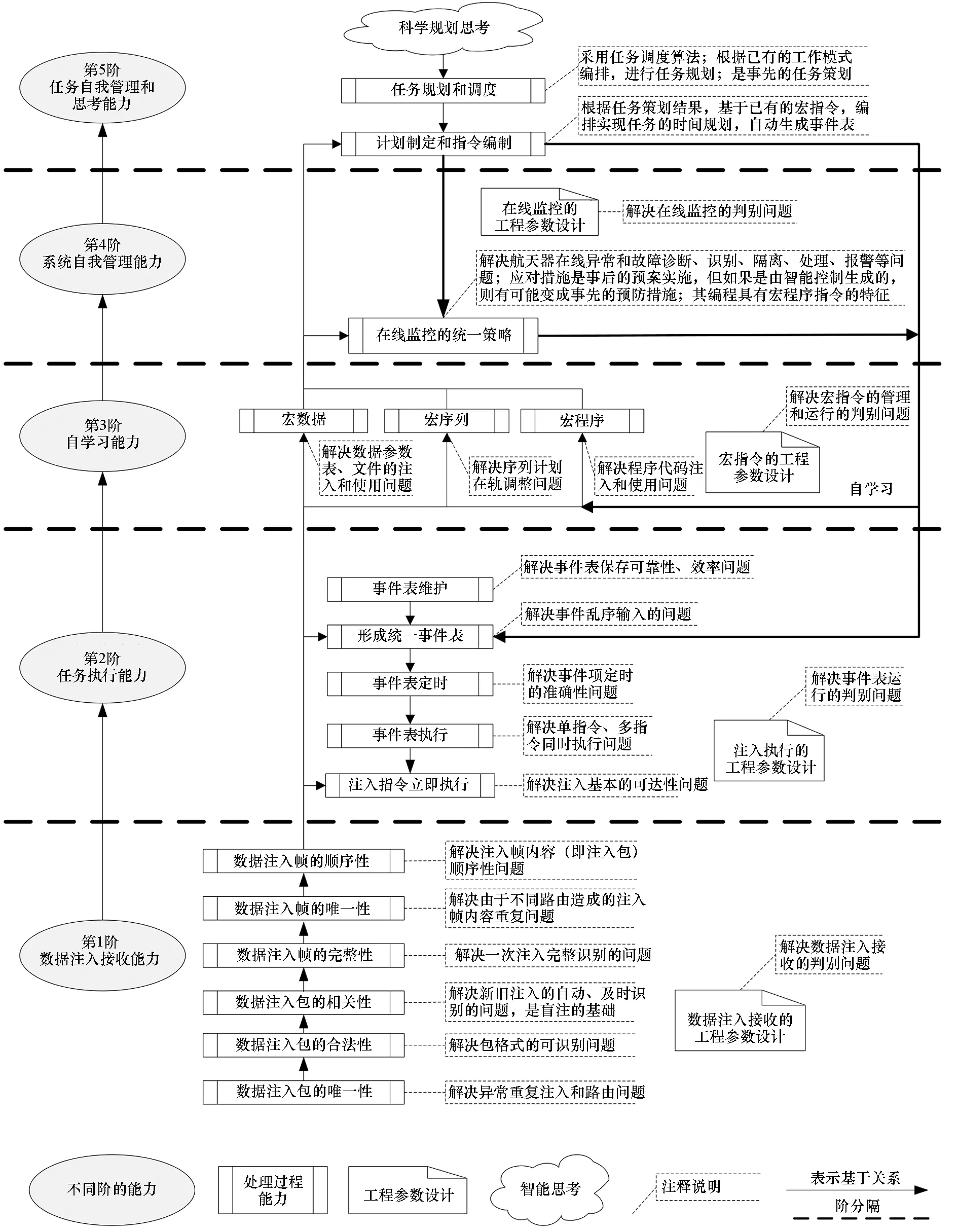
图1 航天器智能自主能力的构建过程Fig.1 Construction stages of intelligent autonomic capability on spacecrafts
实现系统自我管理能力,并保障任务自我管理能力。
2.5 第5阶:任务自我管理和思考能力
进行任务级别的事先规划和调度,自动生成事件表和宏指令,实现自我学习和智能能力的增长。
实现系统思考能力,将地面的科学规划、任务规划、计划制定和指令编制的能力移植到航天器上。
5阶模型中,前3阶的设计应该是归一化的平台,支持上层的智能能力。第4、第5阶的智能能力具有应用背景的特殊性和专业性,因此需要按照问题域和技术域的客观规律建立针对性的问题模型和专业解决方案。并且这种模型和解决方案也会成为专业问题域的通用解决平台,从而引导专业技术的应用和通用化,并支持重用。
3 航天器智能软件体系架构
空间数据系统在航天器上的部分是统一的信息系统,同时也是与地面互联的天基信息网[17]。CCSDS SOIS领域的研究内容是其中不可或缺的组成部分。SOIS基于数据,主要包括管理信息库(Management Information Base,MIB)、电子数据单(Electronic Data Sheet,EDS)等概念。
MIB是一个系统的核心信息单元,在SOIS中主要用于集中保存系统所需的网络管理方面的信息[14],以适应或统一协议和访问的虚拟化、端口化。MIB概念在应用中,可以起到隔离实际参数和虚拟参数,并建立中间映射的作用,从而达到数据和程序分离的目的[18]。
EDS是连接到某个系统中的一个部件(可抽象为设备、业务、应用)所必须具有的信息单元,内容是这个部件可供外部相连系统使用的自描述信息,目的是提供机器可读的信息,以代替手工编辑的接口控制文件(Interface Control Document,ICD)[14],支持即插即用。EDS可使用可扩展标示语言(eXtensive Markup Language,XML)[19]进行描述,具备方便人工阅读和机器可读的双重能力,因此在地面互联网环境中已经得到了广泛的应用。在引入航天领域后,其典型应用实例是美国空军研究实验室(Air Force Research Laboratory,AFRL)的空间即插即用架构(Space Plug-and-play Architecture,SPA)[20-22]中的可扩展变换器电子数据单(extensible Transducer EDS, xTEDS)。
推而广之,将MIB用于整个系统的各个层次,作为信息的载体,可以保存系统的所有管理信息,隔离系统的组成部分,并灵活配置系统。MIB可以是数据库、文件系统或小到一个配置表,其存储的位置可以是分布的或集中的,以方便使用为原则。在系统组成(可抽象为系统、设备和业务)中,MIB之间以及各层级之间通过交换EDS实现部件(可抽象为设备、业务、应用)的即插即用,从而为系统组成的数据化定义和灵活配置提供了可能。
为了实现上述不同等级的智能能力,参考CCSDS SOIS架构进行航天器数据系统软件架构的设计和应用研究,提出了人字架构模型(如图2所示),有助于在航天器上部署和发展智能能力。
1)该架构按照智能能力的需要选择SOIS相应业务(设备发现业务(Device Discovery Service,DDS)[23]、设备枚举业务(Device Enumeration Service,DES)[24]、设备访问业务(Device Access Service,DAS)[25]、设备虚拟业务(Device Virtualization Service,DVS)[26]、包业务(Packet Service,PS)[16],存储访问业务(Memory Access Service,MAS)[27])。SOIS中与本文内容相对关系不大的业务未在图中给出,但不表示不需要。
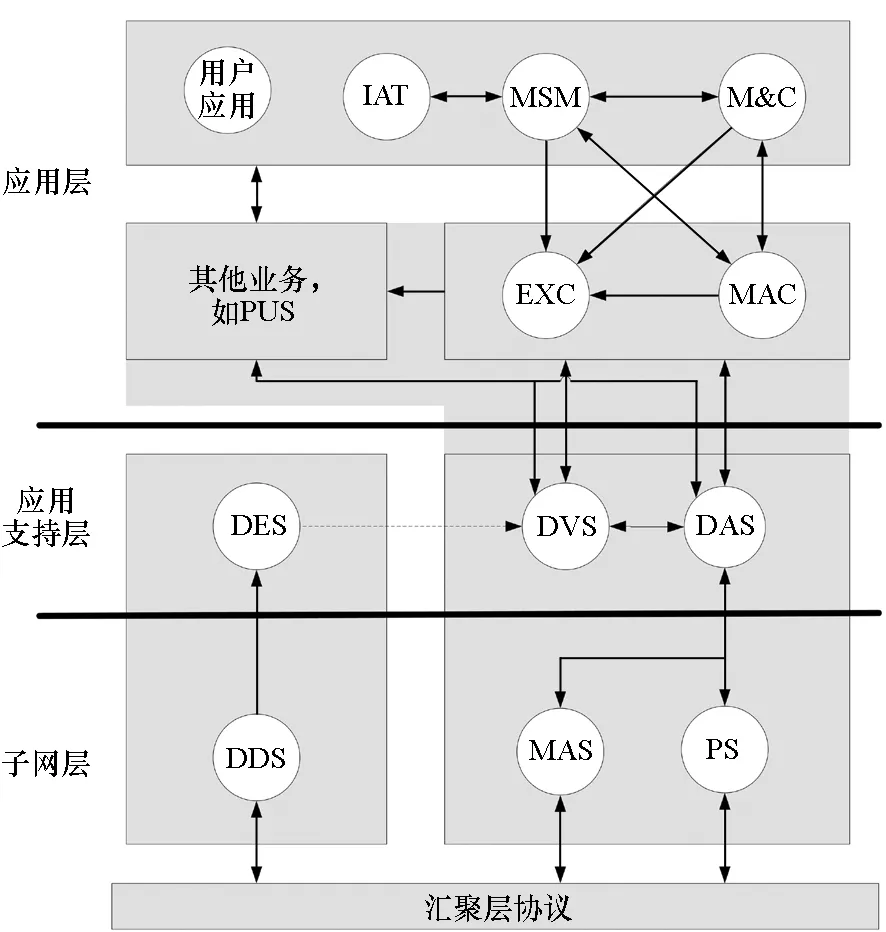
图2 航天器智能软件体系架构(人字架构)Fig.2 Intelligent software architecture on spacecraft (human-body shape architecture)
2)图中的子网层和应用支持层是SOIS架构的内容,分为即插即用和数据传送两个部分。数据传送部分主要包括地面到星上的注入指令和相应的信息反馈,不是完整的消息和包服务。5阶模型第1阶数据注入接收能力由这部分支持。
3)应用层解决注入指令的分析和执行问题,包括两部分业务:指令执行(EXeCutive,EXC)和宏指令(MAcro Command,MAC),对应5阶模型中的第2、第3阶能力。它们支持了航天器上的其他业务,例如欧洲空间局(European Space Agency, ESA)的包应用标准业务[28]。
4)应用层上层应具有系统自我管理能力,即在线监控(on-board Monitoring and Control,M&C)(对应5阶模型的第4阶能力)、任务自我管理(Mission Self Management,MSM)和智能自主思考(Intelligent Autonomic Thinking,IAT)能力(属于第5阶能力)。这些智能业务进一步支撑用户应用。
各项业务以程序为基础,围绕MIB和EDS概念进行数据化设计,是本架构模型的主要思想。根据EDS表达的业务接口内容,各层业务之间、部件之间可以自动识别,建立业务的即插即用能力,并与5阶模型中的各阶能力构成自主控制平台部分。这种即插即用技术与自主控制技术共同支撑上层智能能力的结构以形成“人”字形状,因此该架构命名为人字架构模型。
4 星地一体的运行体系
航天器的智能能力是通过地面系统表现给人的,因此智能系统应该是指星地完整系统。地面与航天器之间是服务的关系。航天器为地面提供任务执行结果的服务,地面为航天器提供任务支持的服务。在任何时候都必须具有科学任务规划、航天器任务规划和任务执行层次的能力,并且通过后台的包装,以服务的形式呈现给最终用户。随着航天器智能能力的提升,地面系统的部分能力会逐步转移到航天器,任务重心和关注对象也随之转移,这种转移关系见表2。
通过表2可知,随着航天器智能能力的提升,地面工作从低端的指令生成到高端的任务规划和下行数据的后续处理,都将得到进一步增强,可表现的智能形式也会层出不穷。
5 结论
本文从讨论部署在航天器上的智能能力的等级划分开始,论述了支持各级能力实现的5阶模型、智能能力增长的人字架构模型以及星地一体的智能系统能力部署的相适应问题。
人字架构具有层次化、业务化和自底向上归一化构建的特点,支持上层智能能力和智能技术的引入,并具有开放性。通过使用模型化方法,解决架构的平台通用性和业务针对性的矛盾。模型化方法主要采用MIB和EDS技术的数据化设计方法,从而为软件定义卫星的裸卫星、数字卫星、软件卫星、虚拟服务等概念提供了可实施的途径。
人字架构的建立和可持续构建需要在相关的软件工程过程、工具环境、语言、人员组织等方面进行改进,既要满足已有的航天工程要求,又要适应新的需要,并通过重用提高研发效率。在应用中有利于航天器在地面的快速集成和飞行过程中的维护维修、组网编队,也适合于地面系统的服务化发展需要。
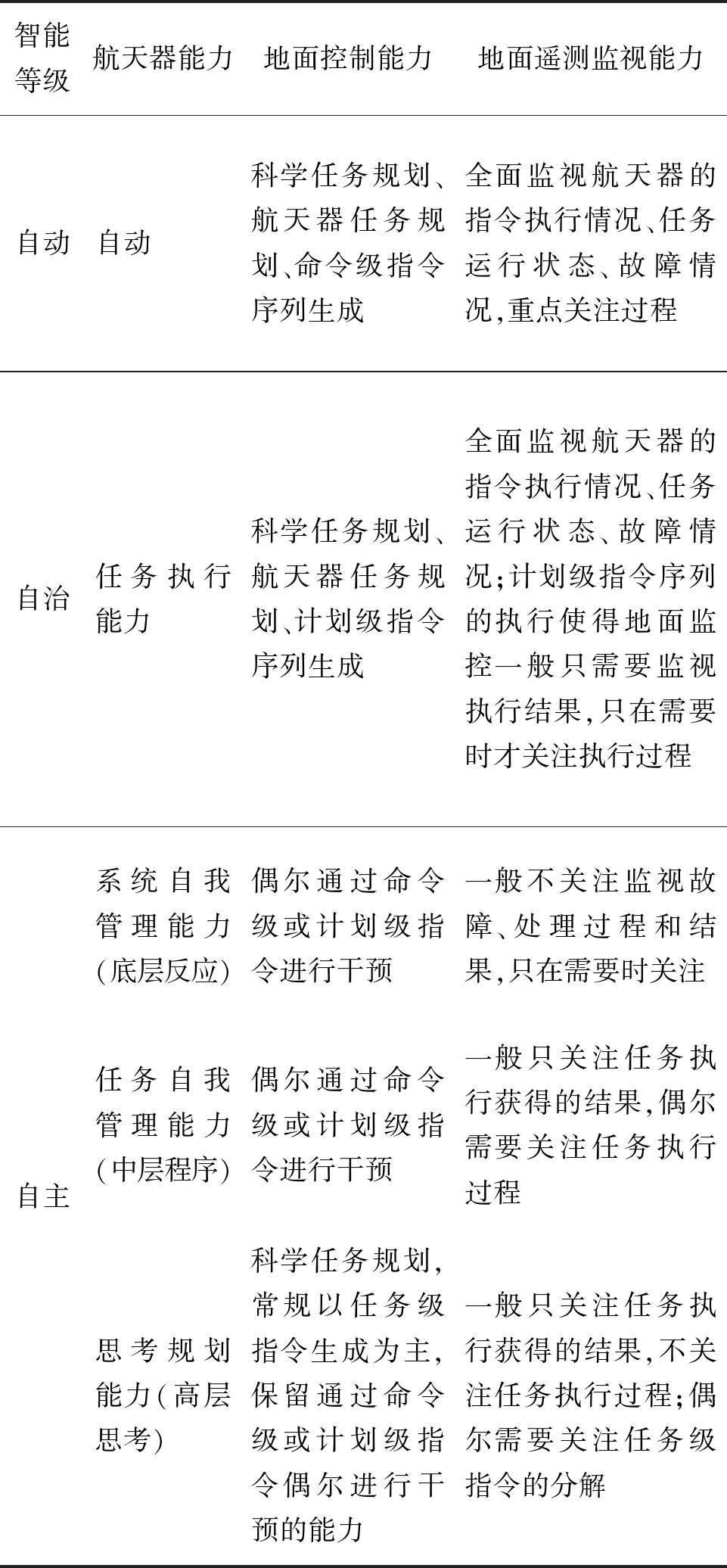
表2 地面系统对不同智能能力航天器的适应
