一种基于三元加权波束形成的线阵左右舷分辨方法
2019-10-14沈毅明沈正一
沈毅明 沈正一
(第七一五研究所,杭州,310023)
拖曳线列阵是水面舰艇、潜艇的主要声呐装备之一,“目标左右模糊”一直是传统拖曳线列阵的主要难题。为了解决该问题,目前常用的方法有:线列阵机动结合目标运动分析方法(Target Motion Analysis,TMA),有滞后的区分;使用特殊结构的线列阵(三元水听器组、双线阵、矢量水听器等)[1-2],在水平波束输出上直接区分。常规波束形成是基于目标信号到达线阵的相对时延关系,通过相位补偿,使目标方向的波束能量输出最大。但是该方法往往不能有效分辨左右舷。三元线列阵波束形成(STeered Minimum Variance,STMV)中使用较多的是基于最小方差无失真原则的自适应方法。其原理是:将镜像方向目标信号响应归为干扰,通过计算干扰与背景的统计特征,使目标真实方向信号无失真通过,干扰通过最小方差原则自适应抑制,从而分辨左右舷。此方法的缺点是性能受干扰与背景统计影响,稳定性不好,且目标在镜像方向的波束输出无法完全消除[3-6]。
本文基于三元水听器组构成的线列阵(以下简称三元线列阵),利用目标信号到达线阵中每组三元组里三个水听器的幅度和相对时延关系,通过设置使目标信号在镜像方向的波束输出为0的加权系数[7],再结合线阵常规波束形成方法,来实现三元组线列阵波束输出的左右舷分辨。
1 理论分析
1.1 三元线阵坐标系
建立三元线阵在三维直角坐标系中的位置模型,示意图见图1。该线阵水平方向的每个三元组部件由三个无指向性水听器构成。每个三元组的三个水听器分布在一个半径为r的圆周上并形成一个等边三角形。三元组中心为On,水平间距为d,横滚为那么,该三元阵水听器各阵元的坐标位置如下:

式中,n表示线阵水平维三元组序号m表示每个三元组内三水听器序号,m=0,1,2。
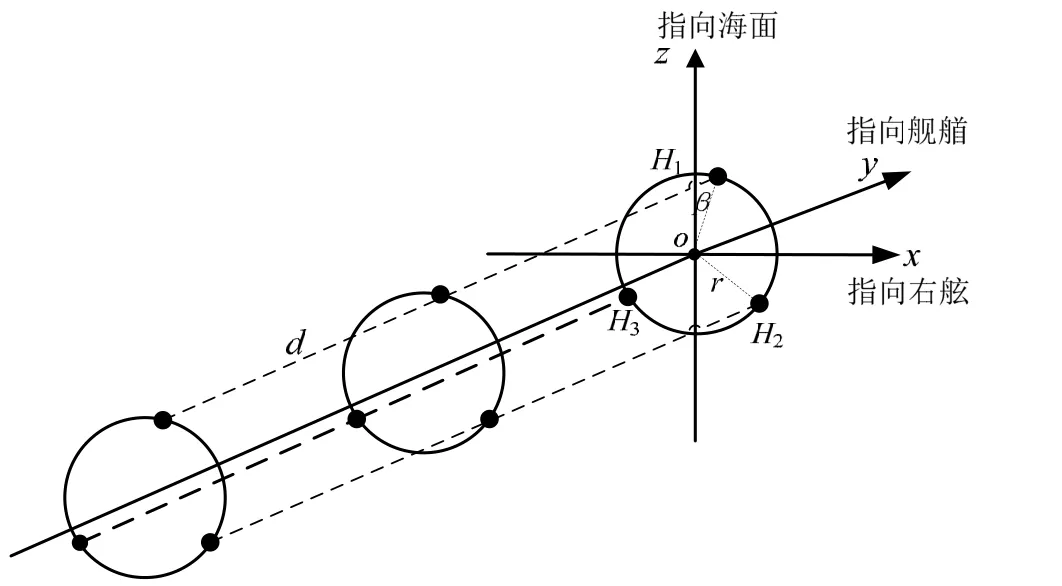
图1 三维直角坐标系中三元线阵示意图
1.2 三元组加权系数
三元线阵的每个三元水听器组垂直安装,三元组平面与线阵轴线垂直,可以通过波束形成方式,利用三元组的水平孔径区分目标在左舷或是右舷。普通常规波束形成由于三元组尺寸远小于线阵接收信号频率对应的波长,左右方向的波束输出几乎没有区别(图2)。考虑通过三元组各水听器加权,使得三元组的输出波束能够满足目标信号在目标方向通过、在目标镜像方向被完全抑制的条件。
对于任意三元组,目标信号在目标方向通过,需要满足以下约束:

式中,c1是目标方向的导向矢量,w是需要计算的权值。

图2 三元组垂直维常规波束响应图(半径r与波长的比值为0.021 7)
目标信号在目标镜像方向被完全抑制的约束:

式中,c2是镜像方向的导向矢量。
结合式(2)、(3),可得

为了简化分析,认为w、c1和c2都是单位矢量,wHw=1,c1Hc1=1和c2Hc2=1。那么在三元组噪声互不相关时,目标方向输出信噪比最大,且满足以上约束的权值解为

重排后,可得权值与参数的正比关系如下:

代入三元组中c1和c2的表达形式,可得
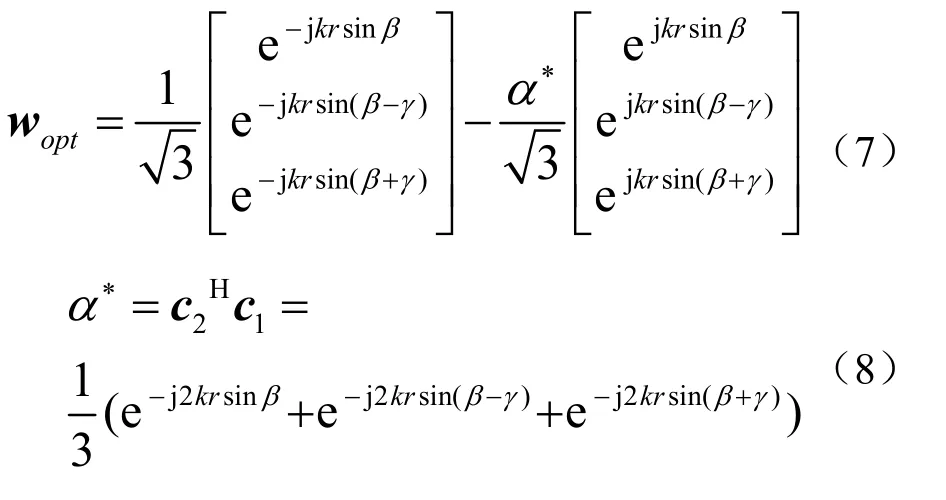
式中,k为波数表示频率,c为声速),r为三元组半径,β表示横滚角,
α*取泰勒级数的一阶展开作为近似,有


最优权值取泰勒级数一阶展开后的形式:
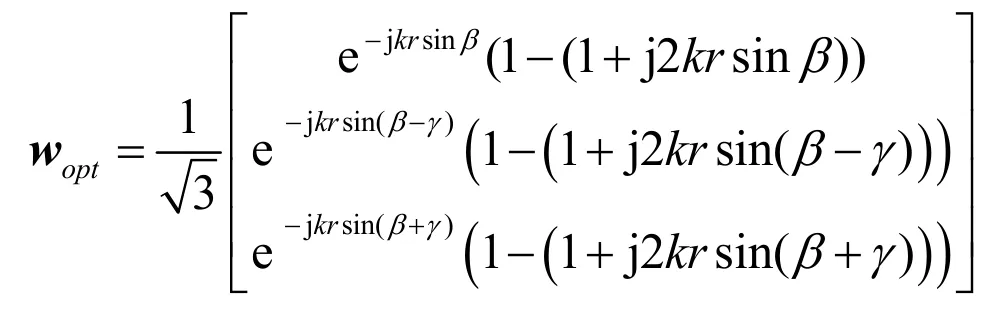
最后整理,舍弃权值各项公约数,可得
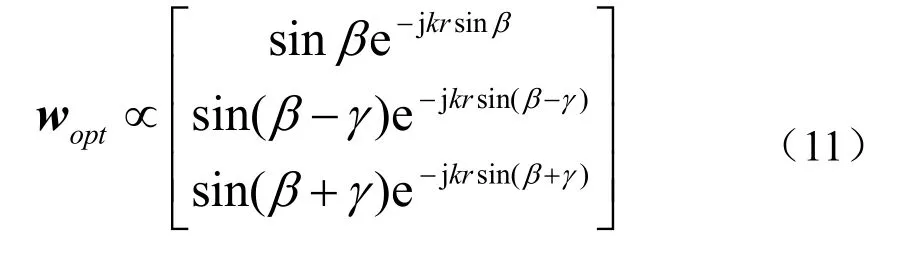
综上,选取wopt作为三元组左右舷分辨的加权系数。
当目标位于左舷时,根据加权系数,可得到三元阵垂直平面的左波束响应图,见图3。从图中可以看出,目标镜像方向(即右波束)的信号被有效抑制,而目标方向(即左波束)的信号仍能有效通过。同理,当目标位于右舷时,可得到右波束响应图,见图4。从图中可以看出,目标镜像方向(即左波束)的信号被有效抑制,而目标方向(即右波束)的信号仍能有效通过。结合左右波束响应图,从而实现目标左右舷分辨。

图3 单个三元组左波束响应图(垂直平面)

图4 单个三元组右波束响应图(垂直平面)
1.3 加权波束形成
根据第m个三元组中的n号阵元的三元加权系数w(m,n,f,θ)结合线阵常规波束形成的导向值可得到阵元一步导向后的结果。


2 仿真分析
为验证本文介绍的线阵三元加权波束形成左右舷分辨方法的正确性和效果,给出两种仿真结果。下文提到的左右舷抑制比是用来比较不同方法的左右舷分辨能力[8],抑制比越大,左右舷分辨能力越强。
2.1 仿真一
线阵由100个0.6 m等间距均匀分布的三元水听器组构成,其中三元水听器的各水听器间距为0.06 m,目标信号为1 000~1 500 Hz的宽带信号。目标信号分别从水平方向10°、60°、90°、-150°入射。对每种入射角的接收信号分别进行常规波束形成、STMV和三元加权的波束形成,波束响应(输出)结果见图5~8。目标左右舷抑制比见表1。
可以发现,常规波束形成是无法区分左右舷的,STMV波束形成和三元加权波束形成都可以分辨左右舷;相比STMV方法,三元加权波束形成的左右舷抑制比更高,但阵增益有所损失。
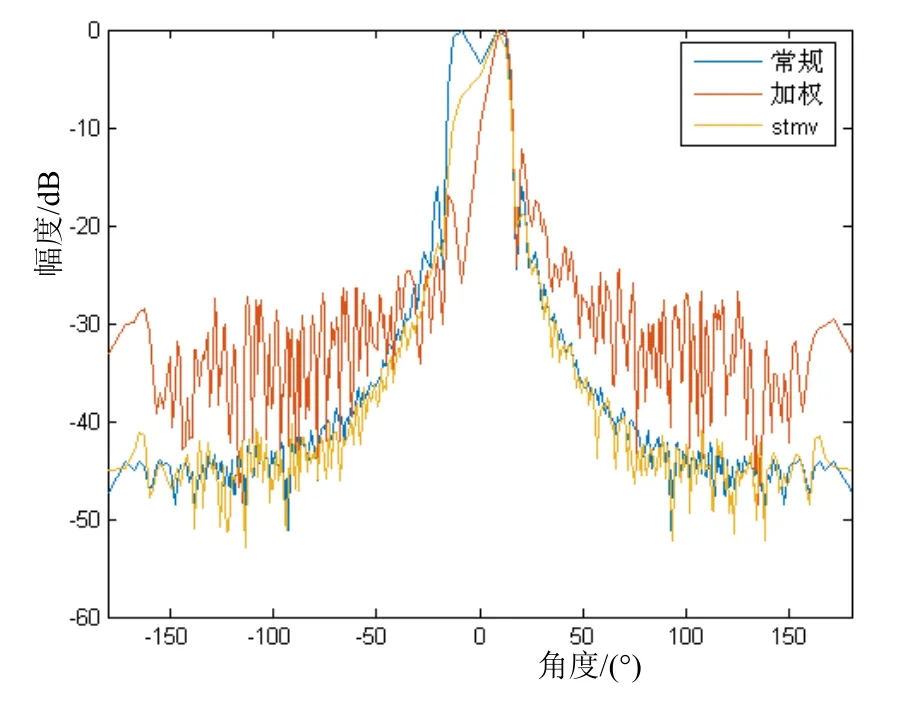
图5 10°水平入射时左右波束输出

图6 60°水平入射时左右波束输出
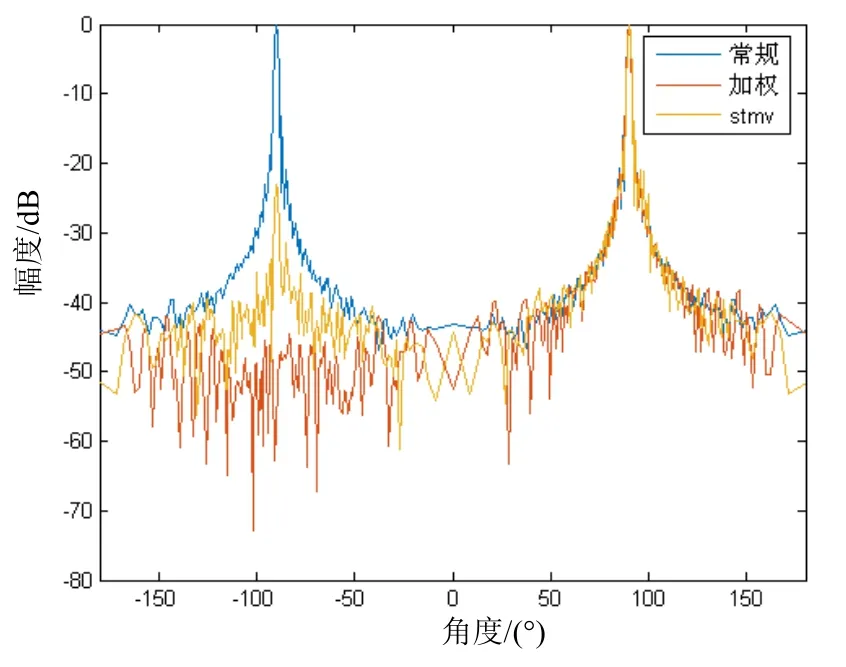
图7 90°水平入射时左右波束输出

图8 -150°水平入射时左右波束输出

表1 左右舷抑制比
2.2 仿真二
保持线阵、目标信号形式的设定不变,在水平10°~170°范围内,目标信号入射方向间隔10°改变,线阵接收信号分别进行STMV和三元加权波束形成左右舷分辨处理。
目标位于不同水平入射方向时,两种方法波束响应的左右舷抑制比结果见图9。可以看出,在整个水平观察范围内,三元加权波束形成相比STMV方法有更好的目标左右舷抑制比。

图9 左右舷抑制比
3 结论
本文介绍了一种可用于三元线列阵的目标左右舷分辨方法。方法通过对三元水听器组接收信号进行三元加权,再结合线阵波束形成, 可以有效进行目标左右舷分辨。该方法的左右舷分辨能力强于STMV方法,可以更有效抑制“镜像假目标”。此方法的缺点是牺牲了目标部分信噪比信息,不利于弱目标的检测。
